
1:首先,第一步,打开mysql官网:https://dev.mysql.com/downloads/connector/j/ ,进入到JDBC的downloads页面
2:第二步,选择如图中,下载方式选择“Platform Independent”
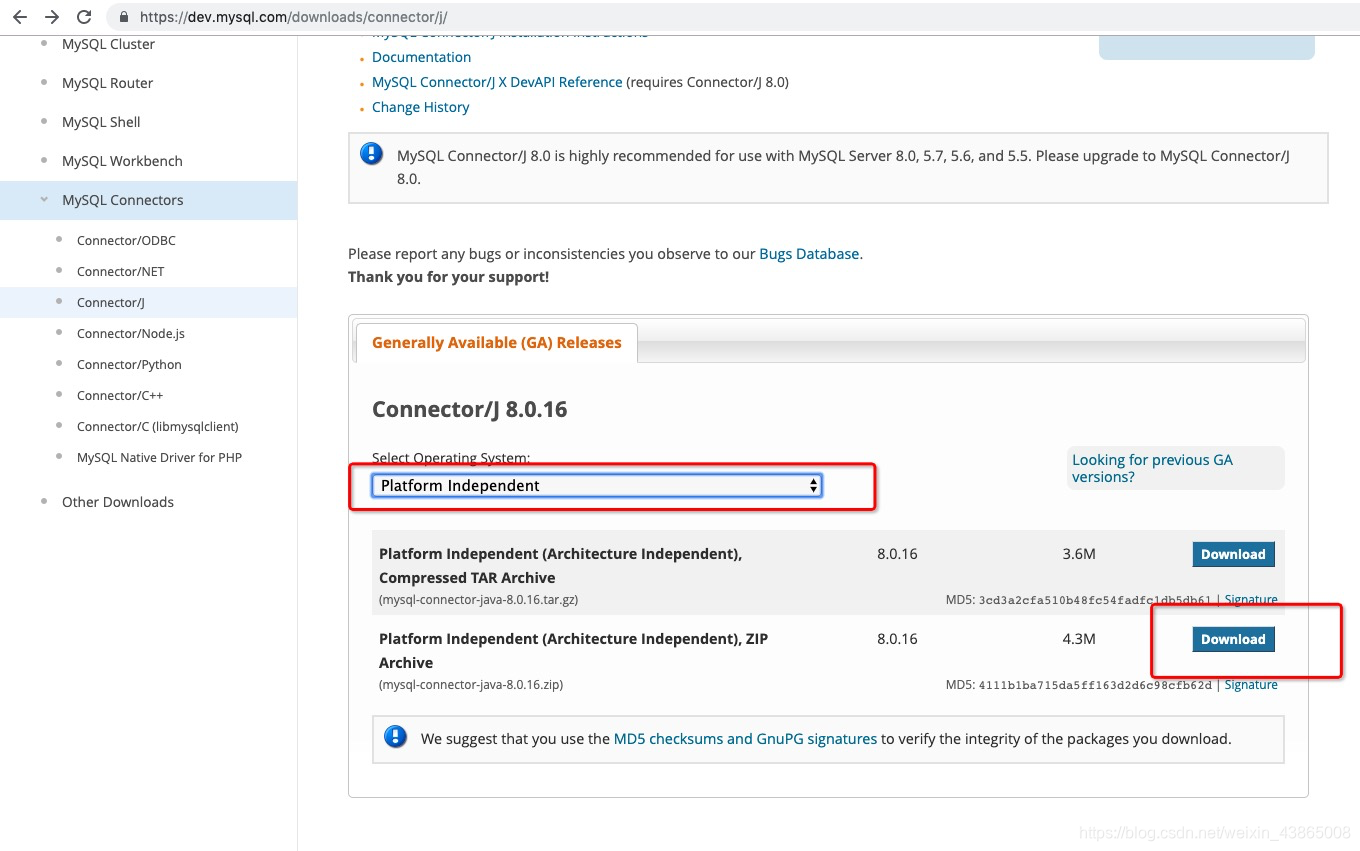

3:选择之后,点击【download】按钮
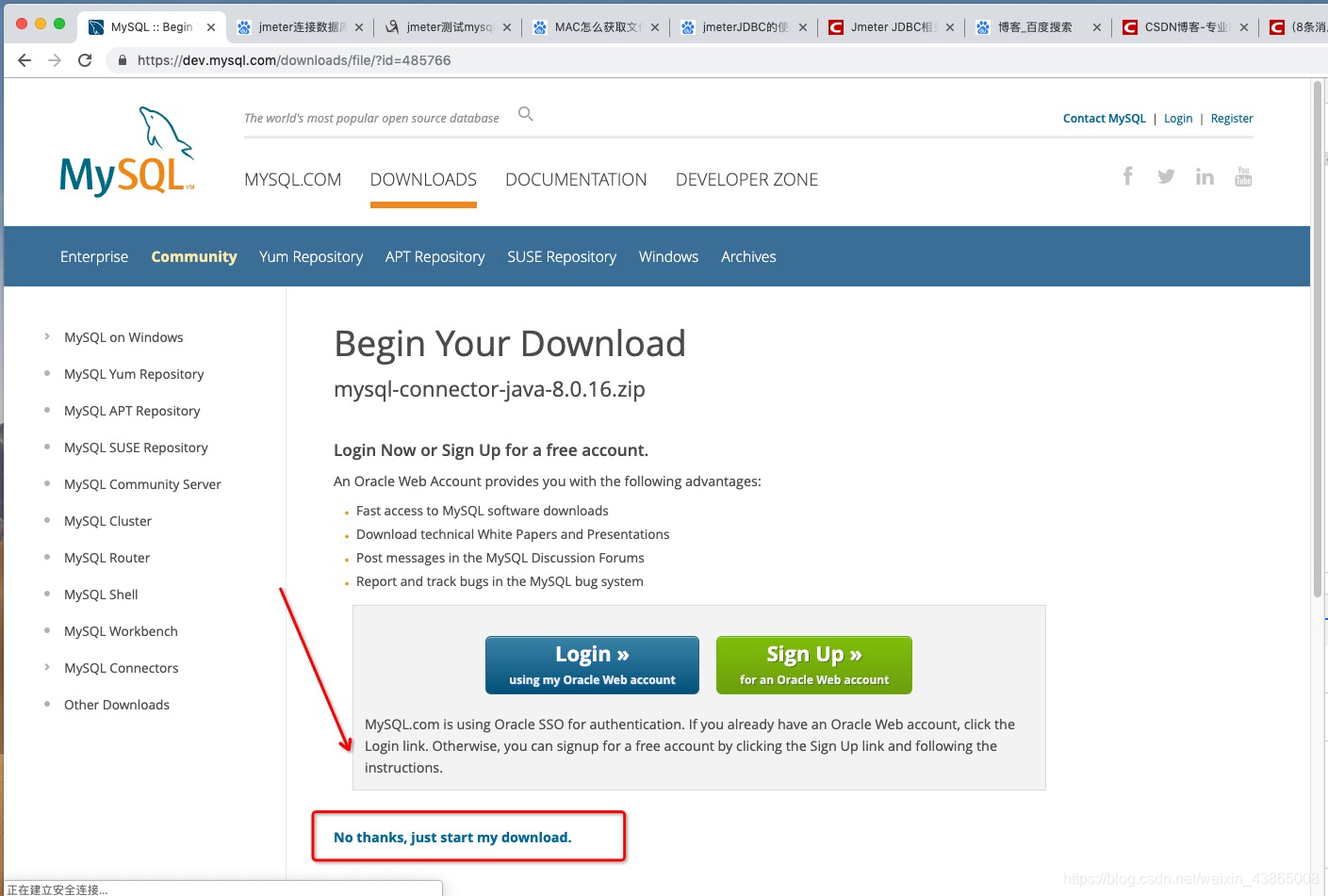
4:点击下载之后,会进入到这个页面,然后点击No,thanks就会直接安装zip了,然后对zip进行解压。
5:
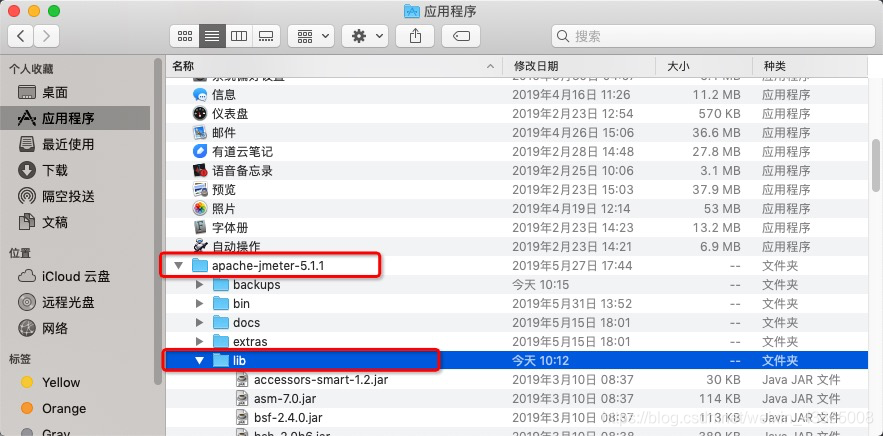
将安装包解压之后,把下载好的mysql-connector-java-8.0.16.jar的jar包放到jemter的lib的文件中就可以了。
说明:
- window跟mac系统的下载方式都是一致的。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/100715.html原文链接:https://javaforall.net


