
大家好,又见面了,我是你们的朋友全栈君。
PhotoScan无人机影像空三处理流程
前言
Photoscan是一款操作轻便,速度快的处理软件,以前一直被利用在处理实景三维或者近景建模,但是被用在测绘中,也是十分方便和精准。更重要的是photoscan可以轻松导出其他空三格式文件,后续很方便在Context capture进行重建,还可以在航天远景Mapmatrix或者CHCmapping中进行立体测图。本文重点介绍如何进行空三,并导出空三成果,相机文件和去畸变影像。
1. 数据准备
1.1无人机航飞影像(tif、jpg)
1.2相机参数
1.3 pos参数—-–注意pos必须和控制点在同一个坐标系。
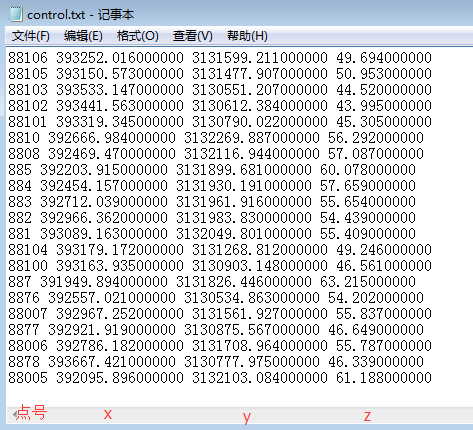
1.4控制点文件和点位图,
2. 操作步骤
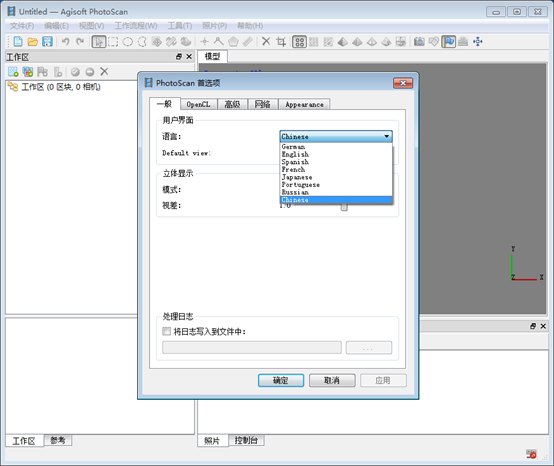
2.1软件设置:工具—偏好设置—语言

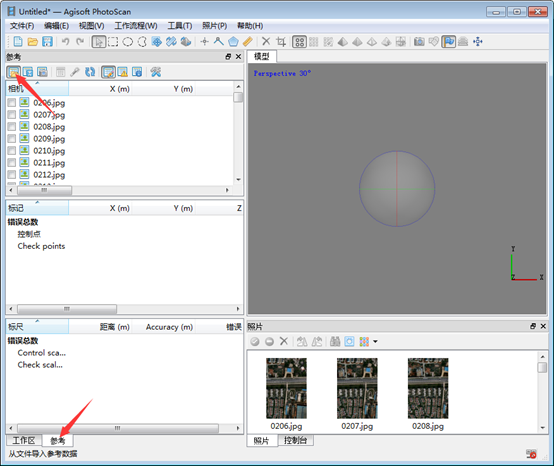
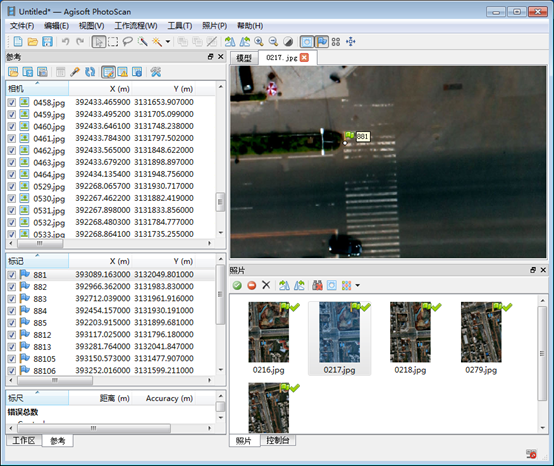
2.2如图选择【添加影像】,注意,也可以在【工作流程】,找到添加影像选项。

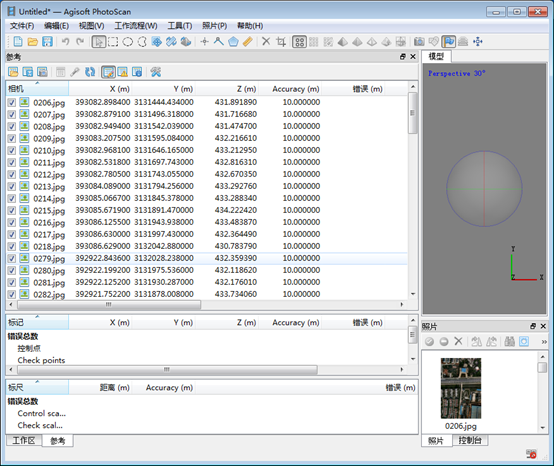
2.3右侧导航栏进入【参考】,添加pos参数:注意pos参数的格式
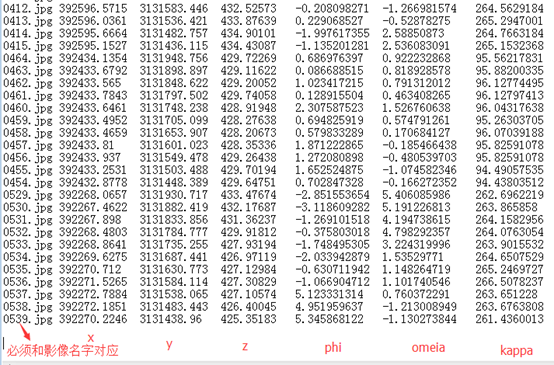

注:间距(pitch)对应phi(俯仰角);滚动(roll)对应omeia(侧滚角);横摆(yaw)对应kappa(旋偏角)
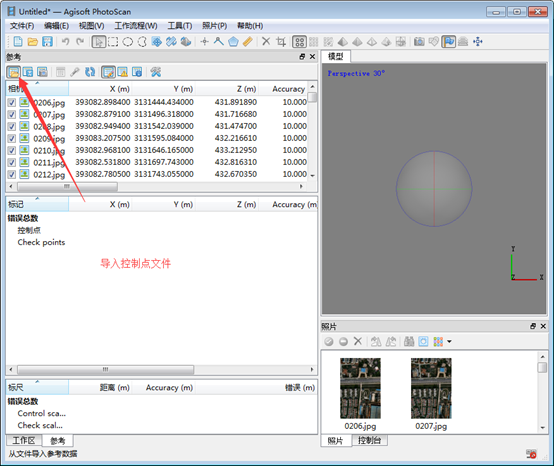
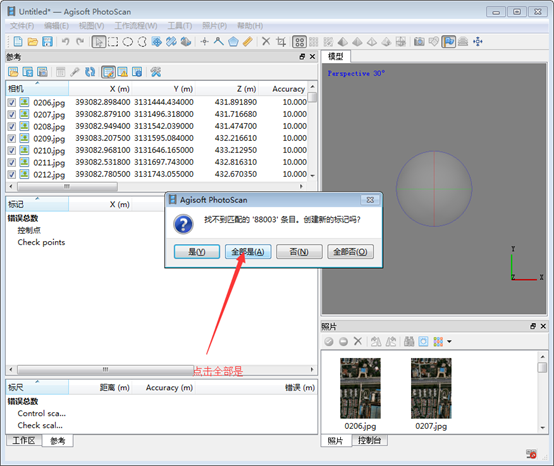
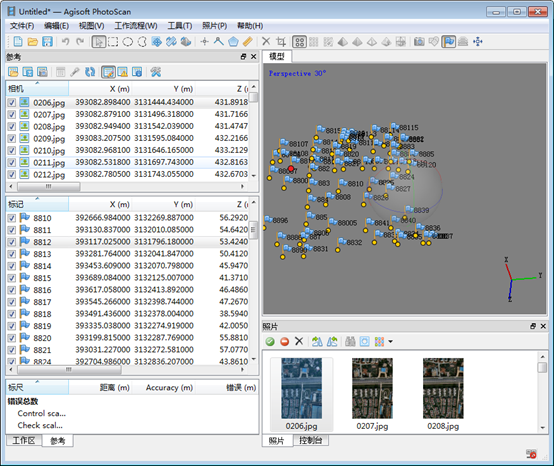
2.4加载控制点文件:控制点文件必须和pos文件处于同一投影坐标
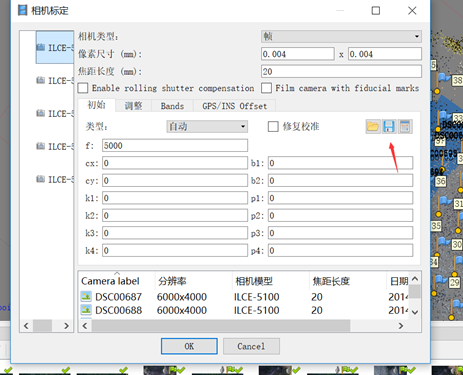
2.5加载相机文件:相机文件加载方式有两种,一是手动输入,点击工具相机校准手动输入,需要说明的是,这里是以像素为单位的。
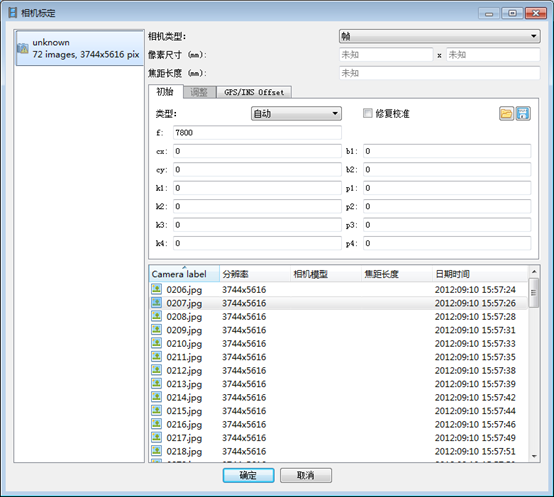
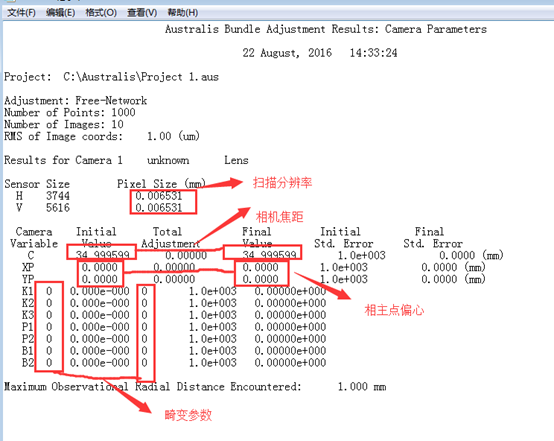
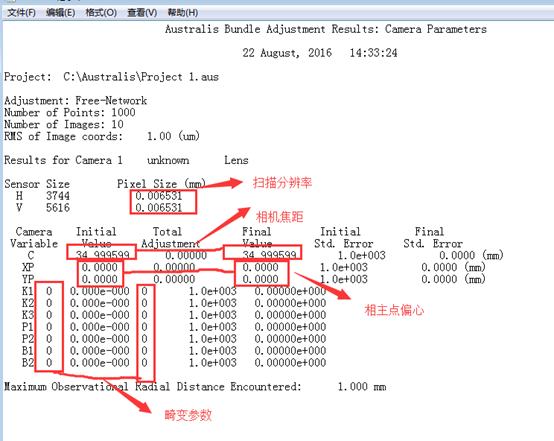
第二个是导入已有相机文件,这里选用Australis格式的,单位是毫米,将对应参数填入下图对应位置即可。
点击下图箭头处,加载已经处理好的相机文件,并填好红框中相关参数

2.6对齐照片
工作流程中选择对齐照片
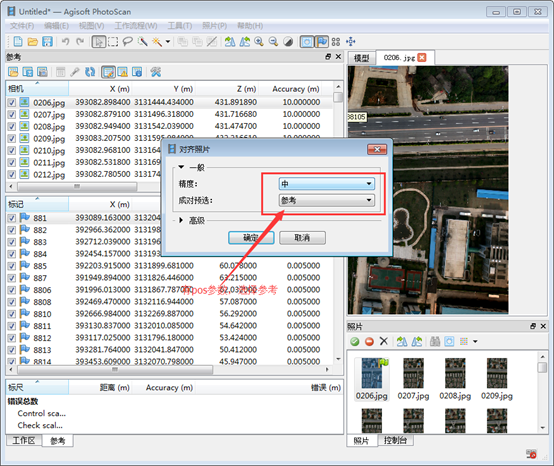
精度一般选择“中”,注意选择【低】也没有问题
2.7刺入控制点
优化对齐后,可以手动刺入控制点了,根据点位图,选中对应影像找准位置右键创建标记,将标记点移动到对应点位处,然后选中所刺入的点右键选择
Filter photos by maker 可以筛选出其他对应的照片,然后一一刺入。刺入两个控制点后即可优化对齐,程序会匹配出每个点的大致位置,此时只需要在左边窗口选中需要添加的点,右键筛选出照片,然后一一刺入即可。
可以筛选出其他对应的照片,然后一一刺入。刺入两个控制点后即可优化对齐,程序会匹配出每个点的大致位置,此时只需要在左边窗口选中需要添加的点,右键筛选出照片,然后一一刺入即可。
刺点过程中可以不断进行优化对齐,调整点位,直到误差在合理范围内。如果刺入错误点位,可以在标记处下拉到下面,选中错误点名,右键删除。
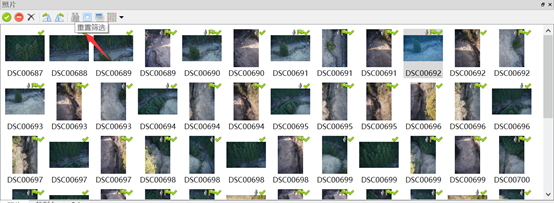
注意如果想查看全部照片,请选择如图【重置筛选】
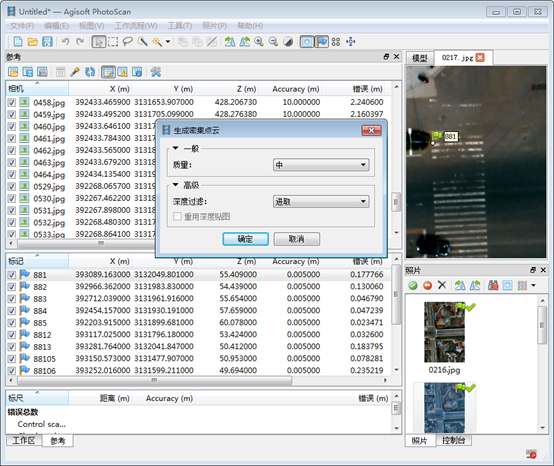
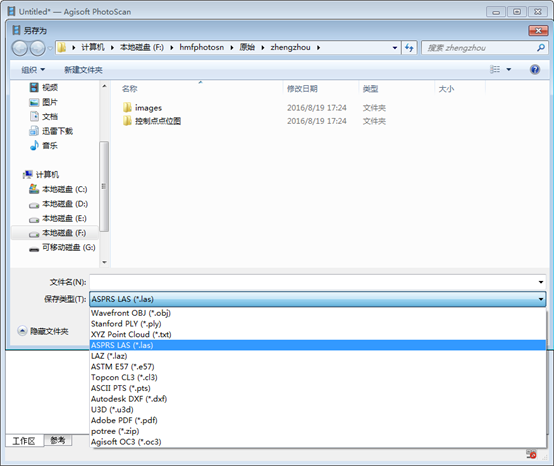
2.8生成和导出密集点云:此过程需要耗费一定时间,生成完后可以导出
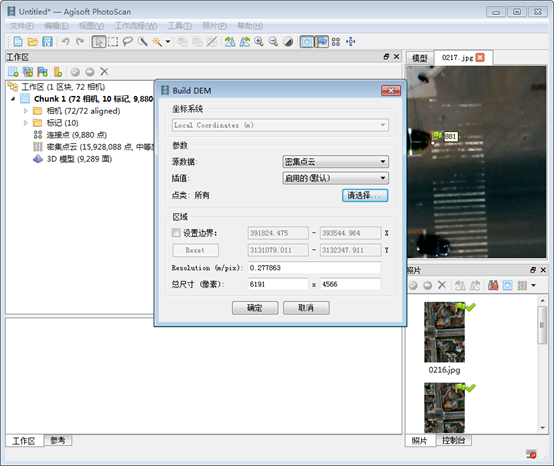
2.9工作流程中,生成和导出dem
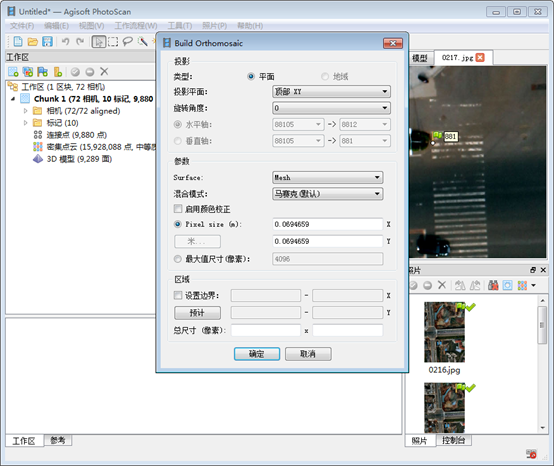
2.10生成和导出正射影像,如果生成了网格,就可以选mesh,选mesh下面的分辨率可以调整,选点云则不可以。
到此,空三解算已经完成,并导出DEM和DOM相关成果。
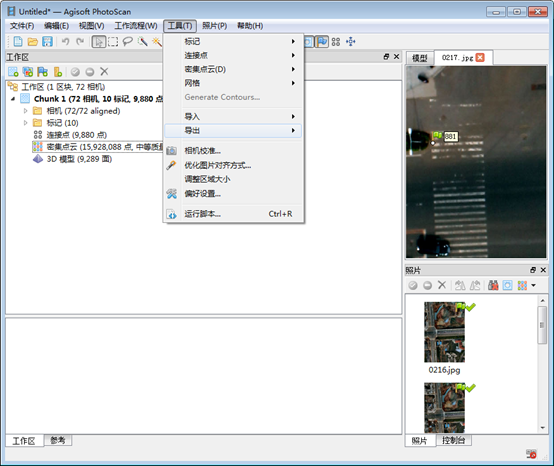
3. 导出其他成果
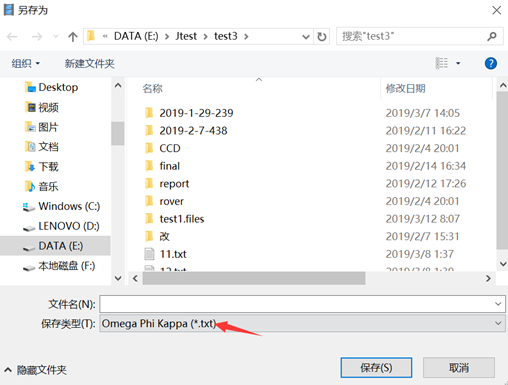
3.1导出空三成果:可以导出Omega phi Kappa工程成果,或者patb空三成果,即可按照正常导入patb成果到MapMatrix中进行测图。

注意,导出空三格式位置1.4.1和。1.3.3版本略有不同,1.4.1在【文件】,导出相机内
3.2导出相机文件
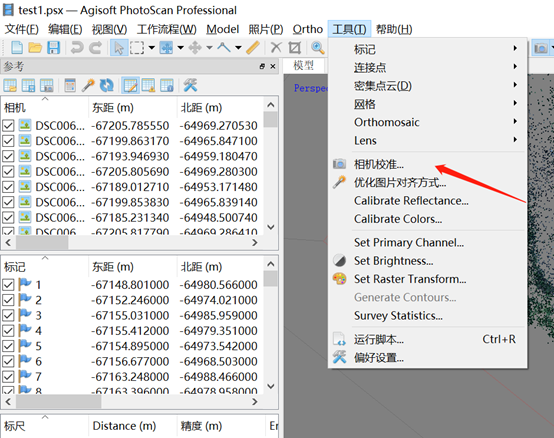
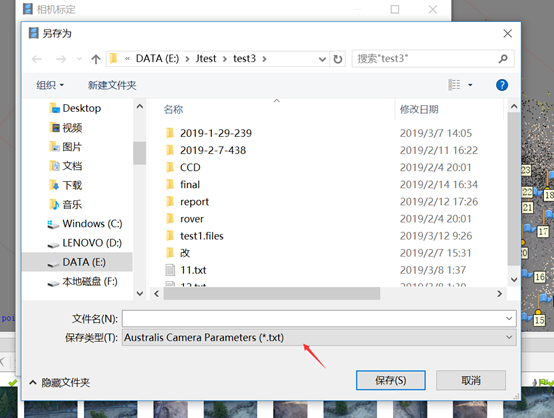
在【相机校准】里,选择导出
格式为“Australis Camera Parameters”
3.3 导出【去畸变影像】
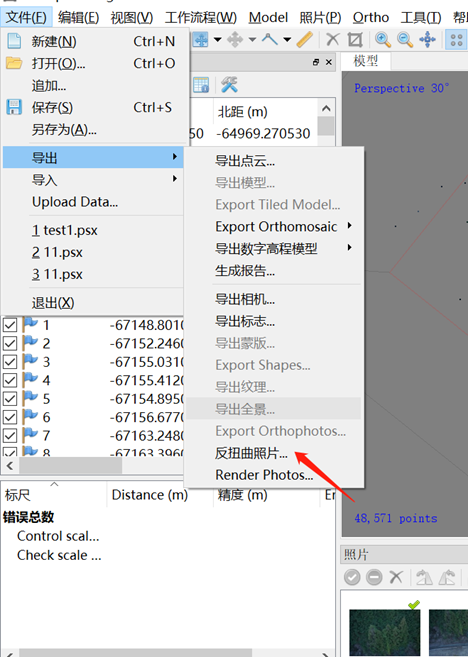
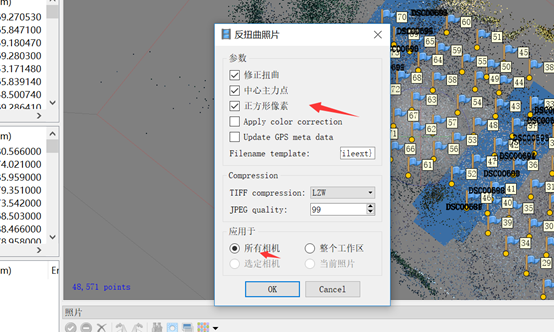
注意,建议通过加入控制点,再【对齐】,再进行这些操作,这样处理后,影像畸变就得到消除。细心的人会发现,再次导入去完畸变照片,原来的控制点位置也会变化。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/127383.html原文链接:https://javaforall.net


