
大家好,又见面了,我是你们的朋友全栈君。
环境:windows10、VS2013、opencv 2.49、openNi、PCL1.8
opencv 环境搭建参考
PCL1.8+openNi搭建参考
将上面的opencv和pcl的配置保存到属性表中,以便下一次快速引用。

新建项目,选择解决方案配置选择Debug x64,属性管理器的Debug|x64中添加上面两个属性表

RGBDtoPC.cpp
#include "stdafx.h"
#include <iostream>
#include <pcl/io/io.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <opencv2/opencv.hpp>
#include <string>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <pcl/visualization/cloud_viewer.h>
using namespace std;
// 定义点云类型
typedef pcl::PointXYZRGBA PointT;
typedef pcl::PointCloud<PointT> PointCloud;
// 相机内参
const double camera_factor = 1000;
const double camera_cx = 325.5;
const double camera_cy = 253.5;
const double camera_fx = 518.0;
const double camera_fy = 519.0;
// 主函数
int main(int argc, char** argv)
{
// 读取./data/rgb.png和./data/depth.png,并转化为点云
// 图像矩阵
cv::Mat rgb, depth;
// 使用cv::imread()来读取图像
// API: http://docs.opencv.org/modules/highgui/doc/reading_and_writing_images_and_video.html?highlight=imread#cv2.imread
rgb = cv::imread("color.png");
cout << "read rgb"<<endl;
// rgb 图像是8UC3的彩色图像
// depth 是16UC1的单通道图像,注意flags设置-1,表示读取原始数据不做任何修改
depth = cv::imread("depth.png");
cout << "read depth" << endl;
// 点云变量
// 使用智能指针,创建一个空点云。这种指针用完会自动释放。
PointCloud::Ptr cloud(new PointCloud);
// 遍历深度图
for (int m = 0; m < depth.rows; m++)
for (int n = 0; n < depth.cols; n++)
{
// 获取深度图中(m,n)处的值
ushort d = depth.ptr<ushort>(m)[n];
// d 可能没有值,若如此,跳过此点
if (d == 0)
continue;
// d 存在值,则向点云增加一个点
PointT p;
// 计算这个点的空间坐标
p.z = double(d) / camera_factor;
p.x = (n - camera_cx) * p.z / camera_fx;
p.y = (m - camera_cy) * p.z / camera_fy;
// 从rgb图像中获取它的颜色
// rgb是三通道的BGR格式图,所以按下面的顺序获取颜色
p.b = rgb.ptr<uchar>(m)[n * 3];
p.g = rgb.ptr<uchar>(m)[n * 3 + 1];
p.r = rgb.ptr<uchar>(m)[n * 3 + 2];
// 把p加入到点云中
cloud->points.push_back(p);
//cout << cloud->points.size() << endl;
}
// 设置并保存点云
cloud->height = 1;
cloud->width = cloud->points.size();
cout << "point cloud size = " << cloud->points.size() << endl;
cloud->is_dense = false;
try{
//保存点云图
pcl::io::savePCDFile("E:\\Visual Studio2013\\project\\RGBDtoPC\\data\\pcd.pcd", *cloud);
}
catch (pcl::IOException &e){
cout << e.what()<< endl;
}
//显示点云图
pcl::visualization::CloudViewer viewer("Simple Cloud Viewer");//直接创造一个显示窗口
viewer.showCloud(cloud);//再这个窗口显示点云
while (!viewer.wasStopped())
{
}
//pcl::io::savePCDFileASCII("E:\\Visual Studio2013\\projectpointcloud.pcd", *cloud);
// 清除数据并退出
cloud->points.clear();
cout << "Point cloud saved." << endl;
return 0;
}
运行后可能直接返回,提示pcl::io Exception
单步运行发现cv::imread()并没有读取到图片。原因如下
opencv有cvLoadImage()和cv::imread()读图片的方法
而后者的链接库版本不正确:(debug下对应的库为xxxd.lib,release的为xxx.lib)
即链接器中的附加依赖项中同时添加带d和不带d的依赖项会出问题,如果用Debug调试则只添加后面带d的即可,将不带d的删除。
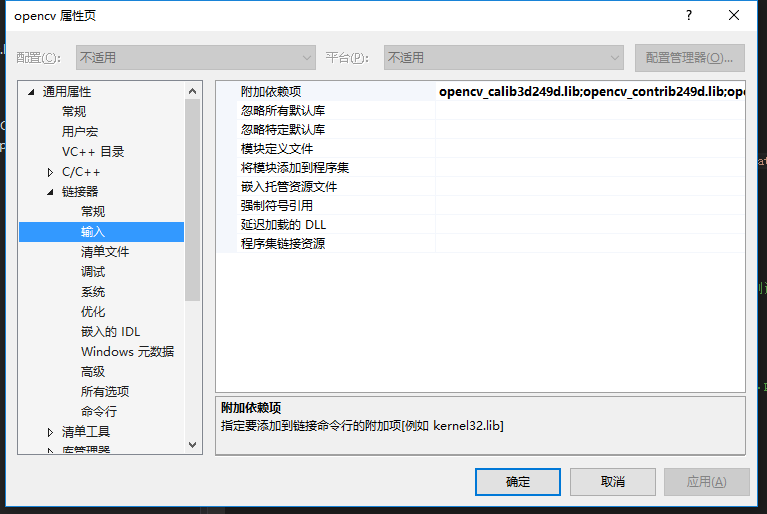
我添加了这些
opencv_calib3d249d.lib
opencv_contrib249d.lib
opencv_core249d.lib
opencv_features2d249d.lib
opencv_flann249d.lib
opencv_gpu249d.lib
opencv_highgui249d.lib
opencv_imgproc249d.lib
opencv_legacy249d.lib
opencv_ml249d.lib
opencv_nonfree249d.lib
opencv_objdetect249d.lib
opencv_photo249d.lib
opencv_stitching249d.lib
opencv_ts249d.lib
opencv_video249d.lib
opencv_videostab249d.lib
opencv_contrib249d.lib
opencv_core249d.lib
opencv_features2d249d.lib
opencv_flann249d.lib
opencv_gpu249d.lib
opencv_highgui249d.lib
opencv_imgproc249d.lib
opencv_legacy249d.lib
opencv_ml249d.lib
opencv_nonfree249d.lib
opencv_objdetect249d.lib
opencv_photo249d.lib
opencv_stitching249d.lib
opencv_ts249d.lib
opencv_video249d.lib
opencv_videostab249d.lib
显示点云图参考:
//显示点云图
pcl::visualization::CloudViewer viewer("Simple Cloud Viewer");//直接创造一个显示窗口
viewer.showCloud(cloud);//再这个窗口显示点云
color.png

depth.png

运行结果
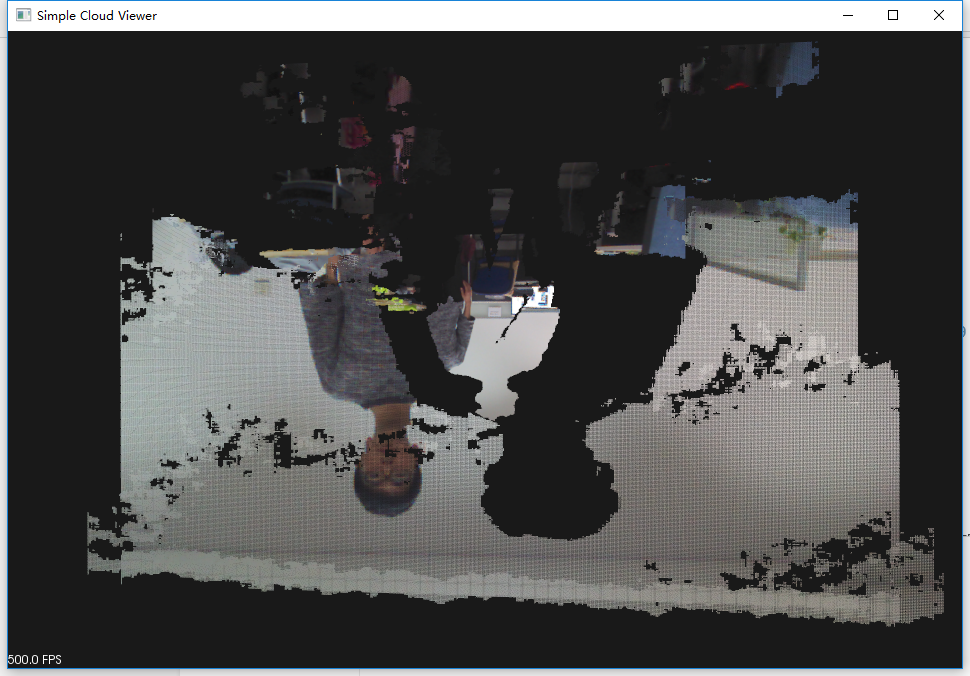
深度图和彩色图没有对准,可能的原因是在代码的相机内参设置不匹配。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/129913.html原文链接:https://javaforall.net


