
大家好,又见面了,我是你们的朋友全栈君。
一、粒子群算法的概述
粒子群算法(PSO)属于群智能算法的一种,是通过模拟鸟群捕食行为设计的。假设区域里就只有一块食物(即通常优化问题中所讲的最优解),鸟群的任务是找到这个食物源。鸟群在整个搜寻的过程中,通过相互传递各自的信息,让其他的鸟知道自己的位置,通过这样的协作,来判断自己找到的是不是最优解,同时也将最优解的信息传递给整个鸟群,最终,整个鸟群都能聚集在食物源周围,即我们所说的找到了最优解,即问题收敛。
二、粒子群算法的流程
粒子群算法通过设计一种无质量的粒子来模拟鸟群中的鸟,粒子仅具有两个属性:速度

 和位置
和位置
,速度代表移动的快慢,位置代表移动的方向。每个粒子在搜索空间中单独的搜寻最优解,并将其记为当前个体极值
,并将个体极值与整个粒子群里的其他粒子共享,找到最优的那个个体极值作为整个粒子群的当前全局最优解
,粒子群中的所有粒子根据自己找到的当前个体极值
和整个粒子群共享的当前全局最优解
来调整自己的速度和位置。粒子群算法的思想相对比较简单,主要分为:1、初始化粒子群;2、评价粒子,即计算适应值;3、寻找个体极值
;4、寻找全局最优解
;5、修改粒子的速度和位置。下面是程序的流程图:
和位置,速度代表移动的快慢,位置代表移动的方向。每个粒子在搜索空间中单独的搜寻最优解,并将其记为当前个体极值,并将个体极值与整个粒子群里的其他粒子共享,找到最优的那个个体极值作为整个粒子群的当前全局最优解,粒子群中的所有粒子根据自己找到的当前个体极值和整个粒子群共享的当前全局最优解来调整自己的速度和位置。粒子群算法的思想相对比较简单,主要分为:1、初始化粒子群;2、评价粒子,即计算适应值;3、寻找个体极值;4、寻找全局最优解;5、修改粒子的速度和位置。下面是程序的流程图:
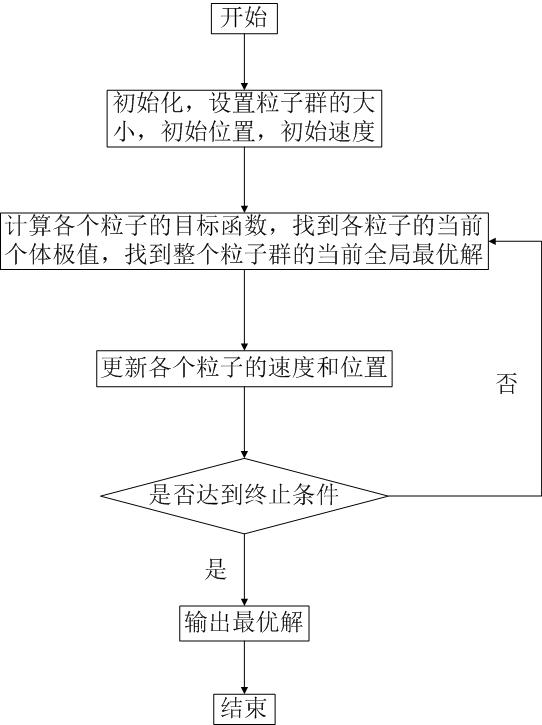
(PSO流程)
下面我们具体解释下流程图里面的每一个步骤:
1、初始化
首先,我们需要设置最大的速度区间,防止超出最大的区间。位置信息即为整个搜索空间,我们在速度区间和搜索空间上随机初始化速度和位置。设置群体规模
。
。
2、个体极值与全局最优解
个体极值为每个粒子找到的历史上最优的位置信息,并从这些个体历史最优解中找到一个全局最优解,并与历史最优解比较,选出最佳的作为当前的历史最优解。
3、更新速度和位置的公式
更新公式为:
其中,
称为惯性因子,
和
称为加速常数,一般取
。
表示区间
上的随机数。
表示第
个变量的个体极值的第
维。
表示全局最优解的第
维。
称为惯性因子,和称为加速常数,一般取。表示区间上的随机数。表示第个变量的个体极值的第维。表示全局最优解的第维。
4、终止条件
有两种终止条件可以选择,一是最大代数:
;二是相邻两代之间的偏差在一个指定的范围内即停止。我们在实验中选择第一种。
;二是相邻两代之间的偏差在一个指定的范围内即停止。我们在实验中选择第一种。
三、实验
我们选择的测试函数是:Griewank。其基本形式如下:
图像为:
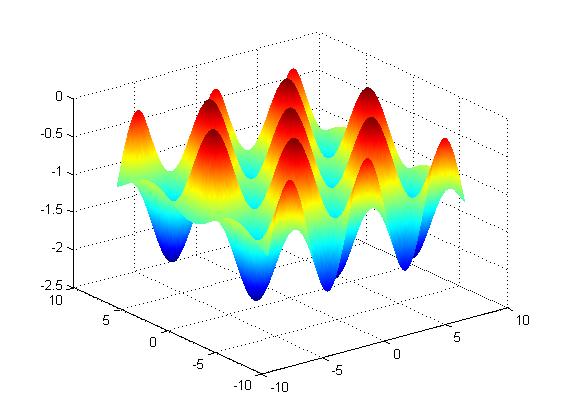
(Griewank函数图像)
在实验中我们选择的维数是20;MATLAB程序代码如下:
主程序:
c1=2;%学习因子
c2=2;%学习因子
Dimension=20;
Size=30;
Tmax=500;
Velocity_max=1200;%粒子最大速度
F_n=2;%测试函数名
Fun_Ub=600;%函数上下界
Fun_Lb=-600;
Position=zeros(Dimension,Size);%粒子位置
Velocity=zeros(Dimension,Size);%粒子速度
Vmax(1:Dimension)=Velocity_max;%粒子速度上下界
Vmin(1:Dimension)=-Velocity_max;
Xmax(1:Dimension)=Fun_Ub;%粒子位置上下界,即函数自变量的上下界
Xmin(1:Dimension)=Fun_Lb;
[Position,Velocity]=Initial_position_velocity(Dimension,Size,Xmax,Xmin,Vmax,Vmin);
Pbest_position=Position;%粒子的历史最优位置,初始值为粒子的起始位置,存储每个粒子的历史最优位置
Gbest_position=zeros(Dimension,1);%全局最优的那个粒子所在位置,初始值认为是第1个粒子
for j=1:Size
Pos=Position(:,j);%取第j列,即第j个粒子的位置
fz(j)=Fitness_Function(Pos,F_n,Dimension);%计算第j个粒子的适应值
end
[Gbest_Fitness,I]=min(fz);%求出所有适应值中最小的那个适应值,并获得该粒子的位置
Gbest_position=Position(:,I);%取最小适应值的那个粒子的位置,即I列
for itrtn=1:Tmax
time(itrtn)=itrtn;
Weight=1;
r1=rand(1);
r2=rand(1);
for i=1:Size
Velocity(:,i)=Weight*Velocity(:,i)+c1*r1*(Pbest_position(:,i)-Position(:,i))+c2*r2*(Gbest_position-Position(:,i));
end
%限制速度边界
for i=1:Size
for row=1:Dimension
if Velocity(row,i)>Vmax(row)
Veloctity(row,i)=Vmax(row);
elseif Velocity(row,i)<Vmin(row)
Veloctity(row,i)=Vmin(row);
else
end
end
end
Position=Position+Velocity;
%限制位置边界
for i=1:Size
for row=1:Dimension
if Position(row,i)>Xmax(row)
Position(row,i)=Xmax(row);
elseif Position(row,i)<Xmin(row)
Position(row,i)=Xmin(row);
else
end
end
end
for j=1:Size
P_position=Position(:,j)';%取一个粒子的位置
fitness_p(j)=Fitness_Function(P_position,F_n,Dimension);
if fitness_p(j)< fz(j) %粒子的适应值比运动之前的适应值要好,更新原来的适应值
Pbest_position(:,j)=Position(:,j);
fz(j)=fitness_p(j);
end
if fitness_p(j)<Gbest_Fitness
Gbest_Fitness=fitness_p(j);
end
end
[Gbest_Fitness_new,I]=min(fz);%更新后的所有粒子的适应值,取最小的那个,并求出其编号
Best_fitness(itrtn)=Gbest_Fitness_new; %记录每一代的最好适应值
Gbest_position=Pbest_position(:,I);%最好适应值对应的个体所在位置
end
plot(time,Best_fitness);
xlabel('迭代的次数');ylabel('适应度值P_g');
初始化:
function [Position,Velocity] = Initial_position_velocity(Dimension,Size,Xmax,Xmin,Vmax,Vmin)
for i=1:Dimension
Position(i,:)=Xmin(i)+(Xmax(i)-Xmin(i))*rand(1,Size); % 产生合理范围内的随机位置,rand(1,Size)用于产生一行Size个随机数
Velocity(i,:)=Vmin(i)+(Vmax(i)-Vmin(i))*rand(1,Size);
end
end
适应值计算:
function Fitness=Fitness_Function(Pos,F_n,Dimension)
switch F_n
case 1
Func_Sphere=Pos(:)'*Pos(:);
Fitness=Func_Sphere;
case 2
res1=Pos(:)'*Pos(:)/4000;
res2=1;
for row=1:Dimension
res2=res2*cos(Pos(row)/sqrt(row));
end
Func_Griewank=res1-res2+1;
Fitness=Func_Griewank;
end最终的收敛曲线:
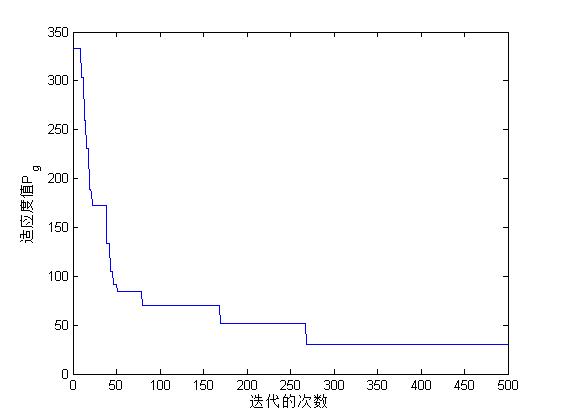
(收敛曲线)
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/132621.html原文链接:https://javaforall.net


