
大家好,又见面了,我是你们的朋友全栈君。
前言
本文的原文连接是:
https://blog.csdn.net/freewebsys/article/details/108971807
未经博主允许不得转载。
博主地址是:http://blog.csdn.net/freewebsys
1,关于【灯哥开源四足机器人】

灯哥开源的四足机器人(不是我)。
作者的主页:
https://www.bilibili.com/video/BV1Ka4y1t7CL
github首页:
https://github.com/ToanTech/py-apple-quadruped-robot
淘宝店地址:
https://shop564514875.taobao.com/
2,使用py-apple
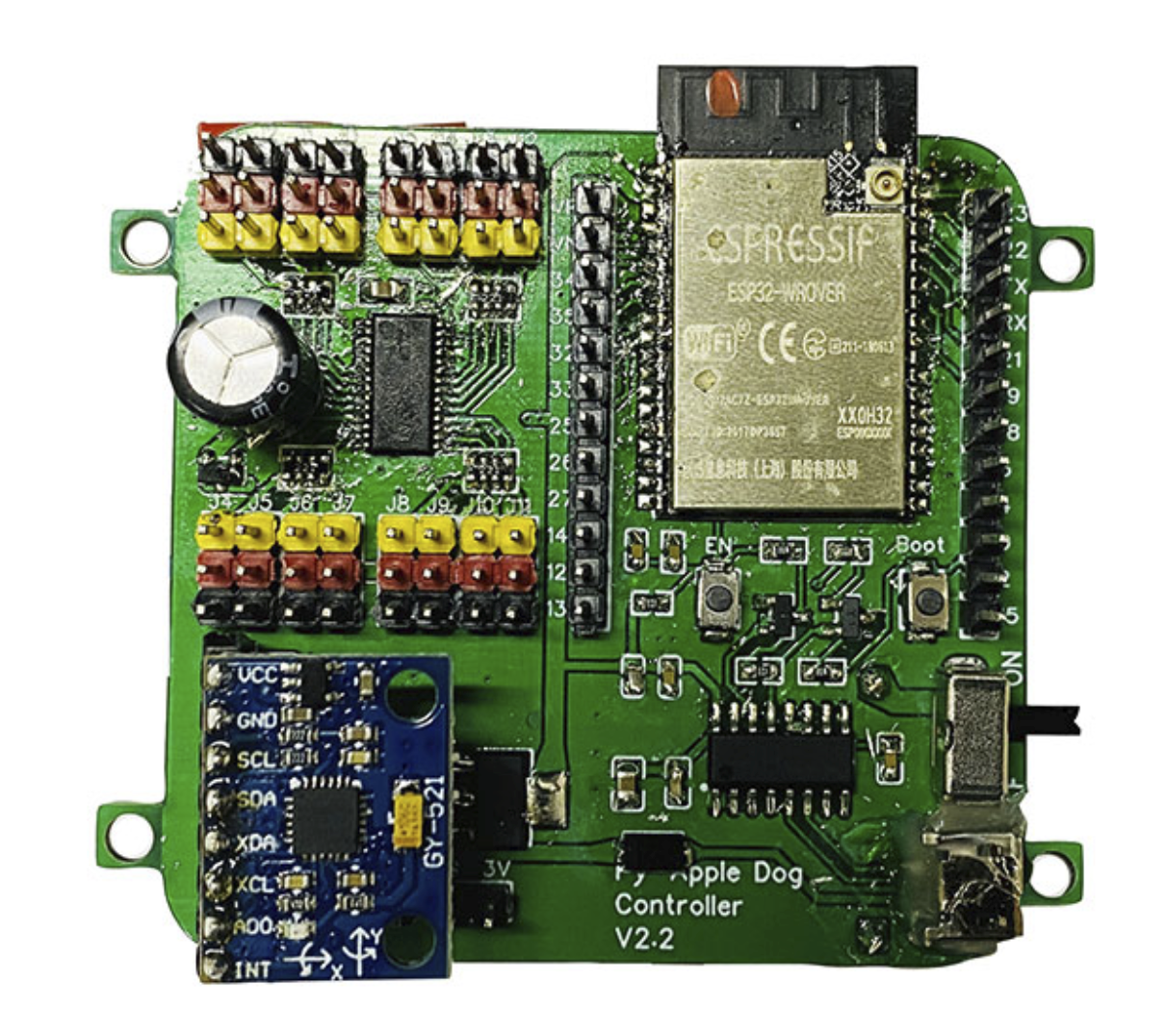
主要的芯片还是使用 ESP32 做的呢,DIY神器芯片。
是一个8自由度的四足舵机机器人。每一个腿有两个舵机进行控制。
不能侧向异动。
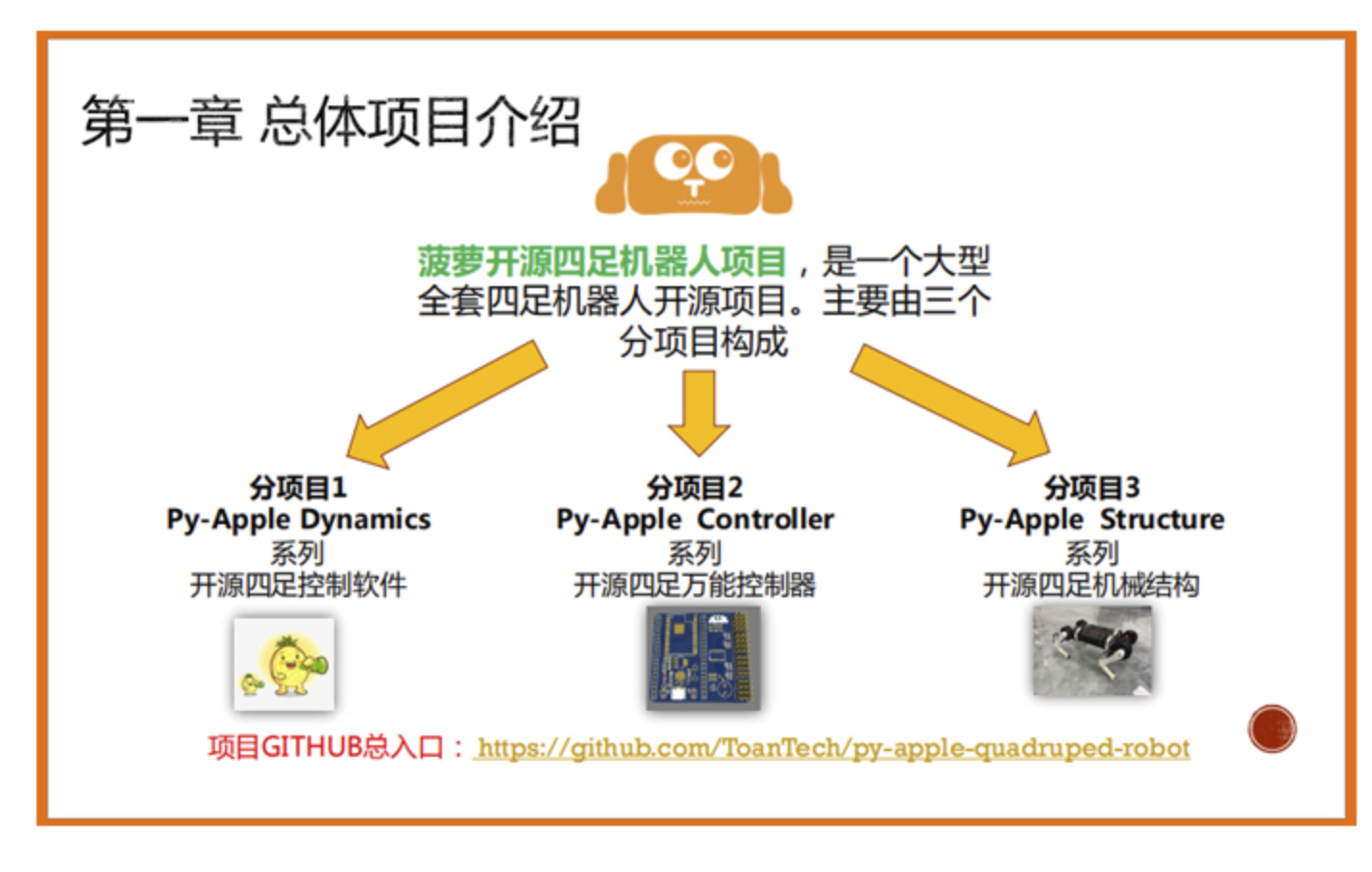
本项目为菠萝狗(Py-Apple Dog) 的开源主站,项目旨在设计制造一只低成本的,可供简易DIY的开源四足机器狗。项目注重多平台化,是一个大型全套四足机器人开源项目。主要由三个分项目构成(点击可进入到对应的Github中):
py-apple 是使用python 开发的。
分为三个主要的项目:
Py-Apple Dynamics 系列 开源四足控制软件
Py-Apple Controller 系列 开源四足万能控制器
Py-Apple Structure 系列 开源四足机械结构
灯哥开源四足机器人–跳跃(起跳相)测试
开源机器狗图形化积木编程方案DEMO讲解与展示–灯哥开源四足机器人 四足机器狗 波士顿动力
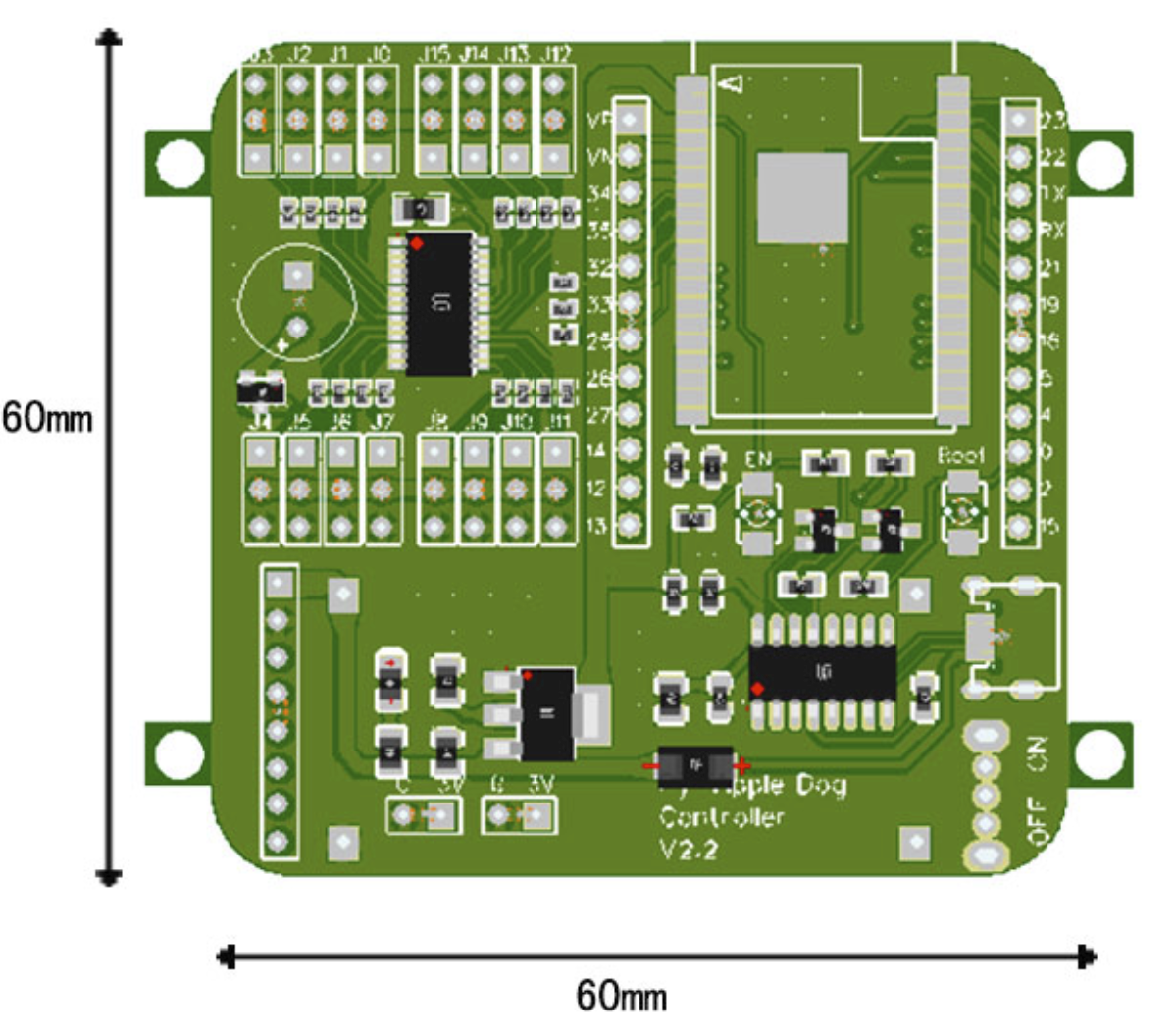
Py-apple Controller V4.0 主控 直插版 2020720 可以从淘宝店买个全套的。
https://item.taobao.com/item.htm?spm=2013.1.w4004-22403997149.3.14ff5d0dk1KF4Y&id=615019670592
| 说明 | 数量 | 名称 | 地址 |
|---|---|---|---|
| 菠萝万能控电路板 | 1 | https://github.com/ToanTech/py-apple-controller | 下载,打板、或联系灯哥配齐 |
| ESP32 | 1 | 【新款ESP32 V1.0.0 Rev1 wifi 蓝牙4MB FLASH 精简版 无线 蓝牙】 | |
| PCA9685舵机拓展板 | 1 | 【16路PWM Servo 舵机驱动板机器人控制器IIC接口驱动器模块PCA9685】 | |
| 4005可调降压电源模块 | 1 | 【优信电子】XL4005大功率5A DC可调降压电源模块输入5-32V超2596】 | |
| AMS1117电源模块 | 1 | 【3.3V 5V电源模块 AMS1117-3.3V 5V 降压稳压模块板 电源板带DC头】 | |
| MPU6050六轴加速度计陀螺仪 | 1 | 【GY-521 MPU6050模块三维角度传感器6DOF三六轴加速度计电子陀螺仪】 | |
| 排针 | 1排(2排) | xh2.54排针 | |
| 排母 | 2排(4排) | xh2.54排母 | |
| JST-2P 母头 红黑端子线 | 1 | 【JST-2P母头/公头 插座对插线连接线 单头镀锡红黑10CM/20CM端子线】 | |
| 800mAh 2S 25C 电池 | 1 | 【航模固定翼飞机双天电池2S3S150/250/300/400/550/800MAH30C/50C】 | |
| 2P 公头带线 端子线 20cm | 1 | 【XH2.54mm端子线2/3/4/5/6P公母头对插线连接线对接线20CM接插线】 | |
| 2P 端子 弯脚 | 1 | 【整包装 1000个 弯脚 XH2.54 白色 弯针 接线端子2P/3P/4P/5678912】 | |
| KCD1-101 船型开关 10*15 | 1 | 【小船型开关KCD1-101 KCD11 饮水机电子称船形翘板电源按钮2脚4脚】 |
灯哥提供个一次性焊接好的板子:
https://item.taobao.com/item.htm?spm=a1z10.3-c-s.w4002-22403997154.22.5b6c4bb1eqWqxG&id=624650446534

很像波士顿狗,不过 是个小版本的。那个圆形的不是真的电机,里面是个舵机。
比较有迷惑性。
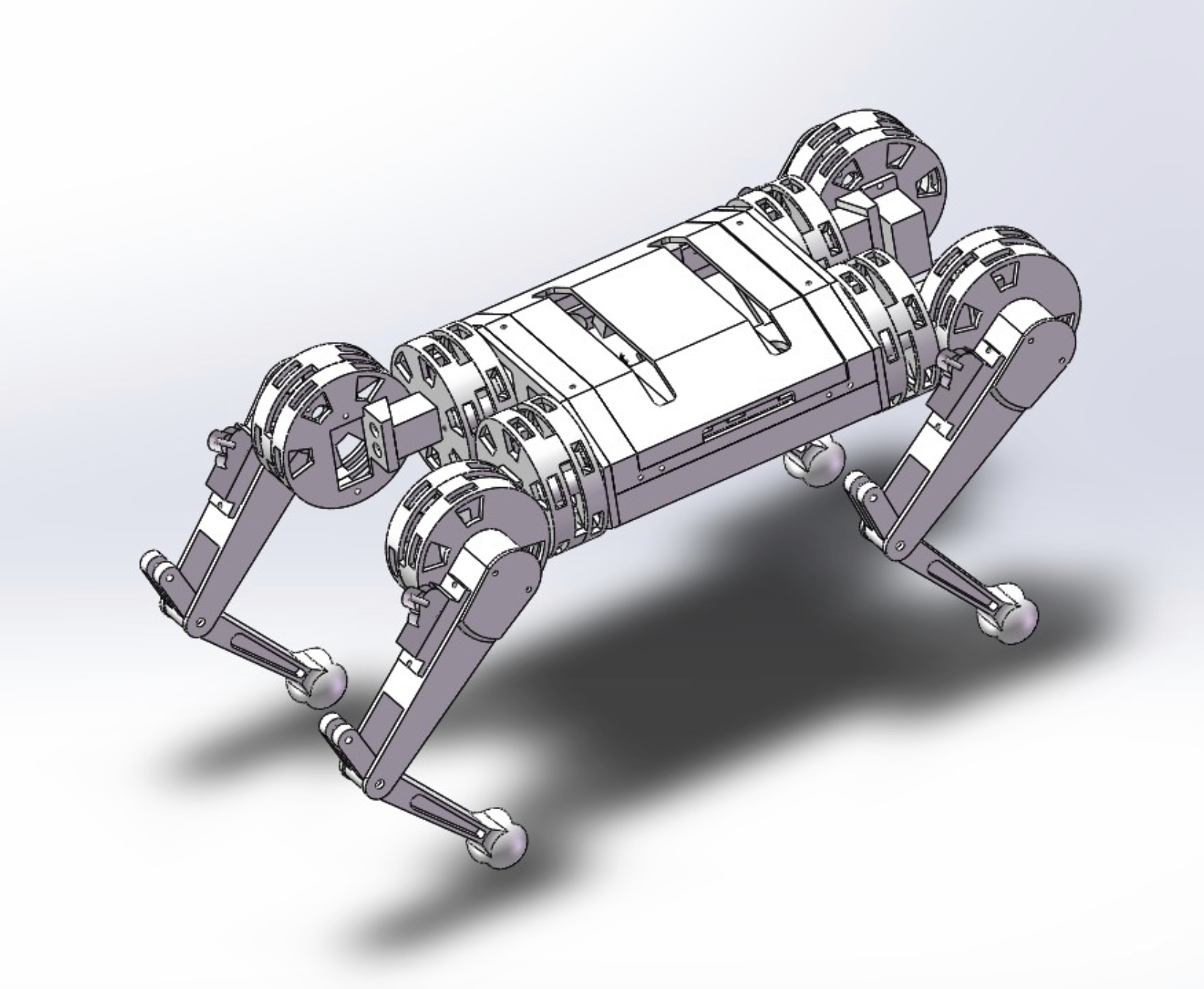
组装好了的效果:

愿意折腾可以购买散装零件,然后自己组装下。
已经有不少人购买了,还有组装好的。
https://item.taobao.com/item.htm?spm=a1z10.1-c-s.w4004-22403997143.10.7baef2daa1VPeC&id=615019670592

最好来一个集成版本的焊接好的。
3,总结
国内做开源分享学习,非常不容易。希望灯哥能够坚持下去。
淘宝店的价格也不算贵,500 多块。毕竟包括了各种电路板,舵机啥的。
要是自己买也费不少钱和时间去折腾。
而且对应学生来说也是值得学习研究的,B站上面的视频,不光是教制作,还将了很多四足机器人的原理。
我本身也喜欢折腾,这个上面还将电路板也开源了。
后续还可以制作双足机器人呢。还可以做更多的开源项目呢。
非常支持灯哥。特别的写个博客宣传下。
还有其他的项目做个开源四足机器人的。也是不错的思路。
但是那个是众筹的,开始用纸板做。后续还开模做了。
Nybble的组装动画
本文的原文连接是:
https://blog.csdn.net/freewebsys/article/details/108971807
博主地址是:https://blog.csdn.net/freewebsys
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/133415.html原文链接:https://javaforall.net


