
大家好,又见面了,我是你们的朋友全栈君。
一.PID控制算法
1.什么是PID
PID:Proportion-Integral-Differential
在过程控制中,我们经常使用的一种算法就是PID算法了,所谓PID控制算法就是对偏差进行比例、积分、微分控制,来使偏差趋于某一固定的值,PID核心由三个单元组成:比例单元(P)、积分单元(I)、微分单元(D),PID实际上就是误差控制。
PID控制系统(模拟)的框图如下:
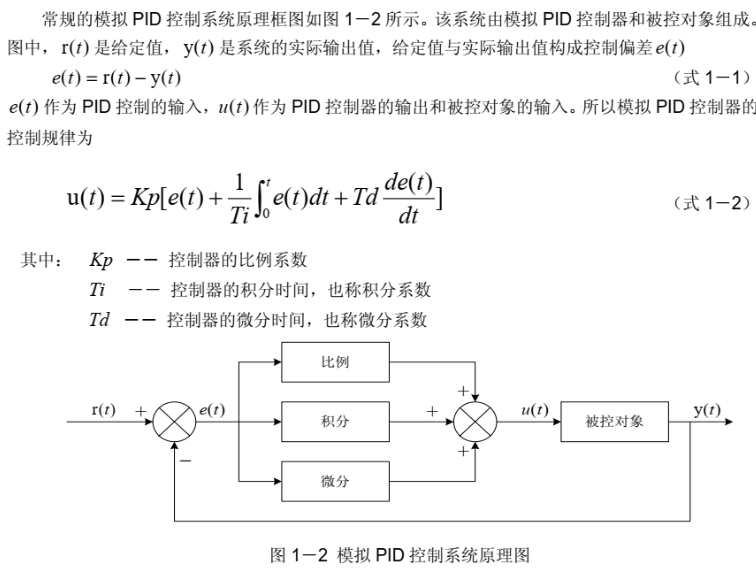

2.PID系数的理解
理解PID的三个系数,可以结合PID调节时候的响应曲线,要使实际中的响应曲线趋近于理想状态下的响应曲线,无非就是三点灵魂:快速(P)、准确(I)、稳定(D),要想控制的变量保持在完美的状态,这三个灵魂就必须调整好。
以下分析中的:P、I、D都指的是PID的三个系数
下面从三个系数对整体控制的影响做出分析
Ⅰ.比例(P)部分
输入值一旦与目标值产生偏差e,就需要缩小偏差,P就是用来缩小偏差的,使控制量向减少偏差的方向改变,而且P越大,偏差缩小的速度就越快,所以P的作用就是使控制量更快地接近目标值。
但是!十肇九快!!!P过大的时候,就容易刹不住,很容易超出目标值,当超出目标值时,又会反向朝目标值飞奔,然后又太快了,再次偏离目标值,然后又朝目标值…这样反反复复的在目标值附近震荡,这就是P太大的弊端:不够稳定。
所以,P大了虽然可以快速响应,但也容易产生震荡,破坏系统的稳定性,可以适当增大D来提高稳定性。
Ⅱ.积分(I)部分
积分的表达式如下:

从其表达式中可以看出,只要存在偏差,积分结果就会不断增加,也就是控制作用会不断增加;当偏差为0时,积分结果是一个常数,此时控制作用才可能是一个稳定的值。
所以直观的来看,积分可以消除系统的静态偏差,因为一旦有误差,积分就会增加,系统就会做出反应,直到偏差为0,也就是积分保证了控制的准确性。
积分的作用虽然会消除静态偏差,但是也会拉低系统的响应速度,就是说I对P有抑制作用。
Ⅲ.微分(D)部分
上面说了,P过大会引起震荡,降低系统稳定性,可以通过提高D来减小震荡。
微分的作用就是根据偏差的变化趋势预先给出纠正!怎么个预先法呢?因为微分可以看作是求导,上过高中同鞋都知道:求导可以反映函数的变化趋势。所以,通过微分,可以对偏差的变化进行预判地抑制,防止 矫枉过。
微分的引入,有助于减小震荡,使系统趋于稳定,D越大,抑制P的效果就越强。
3.PID的数字化处理
由于计算机控制是一种采样控制,只能根据采样时刻的偏差值计算控制量,所以我们是通过软件实现控制算法的,要对PID进行离散化处理(也就是数字化处理),就是根据离散采样点的偏差值进行控制,在离散化处理后,相比于模拟控制由如下改变:
- 由差分代替微分
- 由累加代替积分
数字化处理后的PID系统如下:
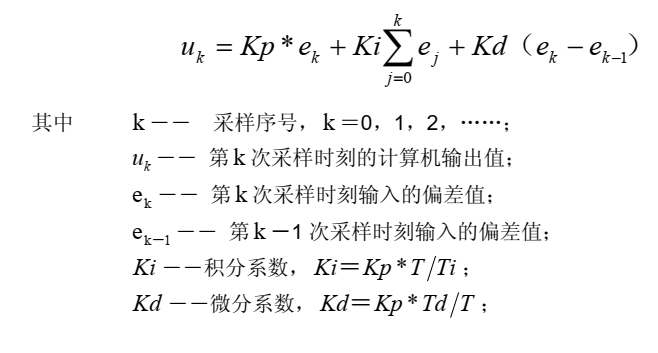
采样的周期越小,就越接近模拟控制,控制的效果也就越好。
二.位置闭环控制
位置闭环控制,也叫位置式PID控制,就是传统的PID控制,控制的偏差逐渐接近0,从而使控制量趋于目标值。
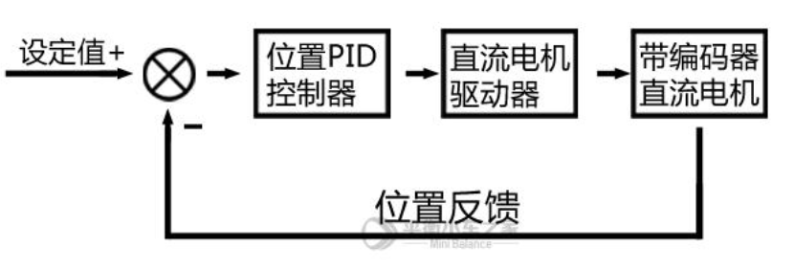
对电机使用位置闭环控制的时候,就是控制电机的转动位置,通过编码器的脉冲累加测量电机的位置信息,与目标位置进行比较,得到偏差值,通过比例、积分、微分的PID算法进行控制,使偏差趋于0。
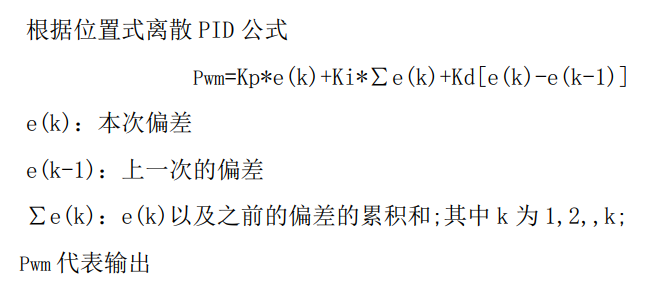
电机控制中,输出量就是电机控制模块输出的占空比,作用于电机转速,此时离散PID的公式如下:
其控制框图如下:
控制实现代码如下:
/* 返回输出 * Encoder为输入(编码器测量的信号,也就是电机转速) * Target为目标值 */
//KP、KI、KD为PID的系数
int Postition_PID( int Encoder, int Target )
{
//依次的变量代表:偏差、输出、偏差积分、偏差微分
static float Bias,Pwm,Integral_bias,Last_bias;
Bias = Encoder-Target;//计算偏差
Integral_bias += Bias;//计算偏差积分,累加
Pwm = KP*Bias+KI*Integral_bias+KD*(Bias-Last_bias);//计算输出,根据PID
Last_bias = Bias;//保存为上一次偏差
return Pwm;//返回输出
}
在定时中断里实现PID控制,定时中断相当于离散的采样点,中断服务函数中可调用控制函数:
//中断中如下调用
Moto = Postition_PID( Encoder, Target );
//最终的控制落回到控制电机转速上
Set_Pwm( Moto );
最终的控制要落回到电机的控制上,也就是电机的转速控制——PWM控制。
位置控制的调节经验:先只使用P控制,逐渐增大P,系统震荡后加入微分控制D来抑制震荡,调整KD直至消除震荡,之后再根据系统对响应和静差的要求,调节P、I参数。
三.速度闭环控制
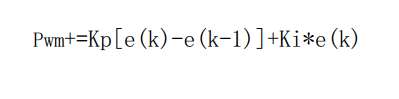
速度闭环控制也可叫增量式PID控制,与位置式PID控制不同,位置式PID输出的是控制量新的状态,而增量式PID输出的是控制量的增值,增量式PID的离散公式如下:
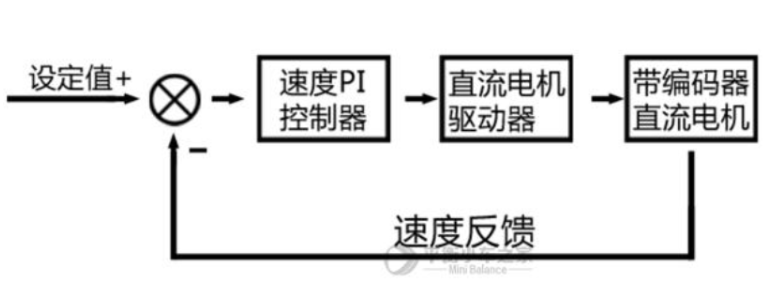
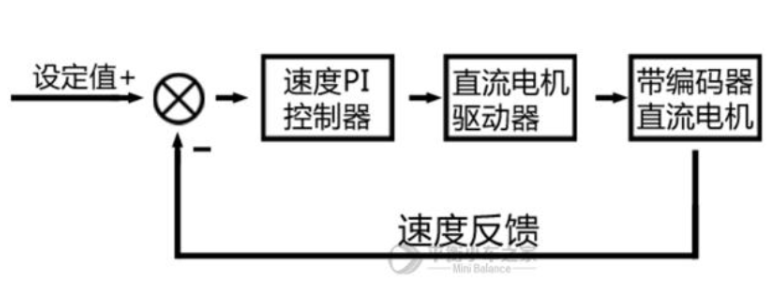
位置闭环控制是使电机准确转到某一位置,速度闭环控制是使电机以某一速度转动,在速度闭环控制里,我们只需要使用PI控制即可,所以简化后的公式如下:
注意:公式直接将控制量的增量加在上一次控制量的状态上了!!!
控制框图如下:
控制代码如下:
/* 返回输出 * Encoder为输入(编码器测量的信号,也就是电机转速) * Target为目标值 */
//KP、KI为PID的系数
int Incremental_PI( int Encoder, int Target )
{
//依次的变量代表:偏差、输出、偏差微分
static float Bias,Pwm,Last_bias;
Bias = Encoder-Target;//计算偏差
Pwm += KP*(Bias-Last_bias)+KI*Bias;//增量式PI
Last_bias = Bias;//保存为上一次偏差
return Pwm;//返回输出
}
在定时中断里实现PID控制,定时中断相当于离散的采样点,中断服务函数中可调用控制函数:
//中断中如下调用
Moto = Incremental_PI( Encoder, Target );
//最终的控制落回到控制电机转速上
Set_Pwm( Moto );
要注意速度闭环控制采用PI控制,公式与PID有所不同,输出的也是控制量的增量,这里将增量直接加在了上一次的状态量上,所以输出的还是控制量的新状态。
最后附上我找到的PID参数调整口诀:
常用口诀:
参数整定找最佳,从小到大顺序查
先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢。微分时间应加长
理想曲线两个波,前高后低4比1
一看二调多分析,调节质量不会低
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/135527.html原文链接:https://javaforall.net


