
大家好,又见面了,我是你们的朋友全栈君。
激光雷达传感器
常见的激光雷达主要有三角测距和TOF两大类型。
1.三角测距
测量原理
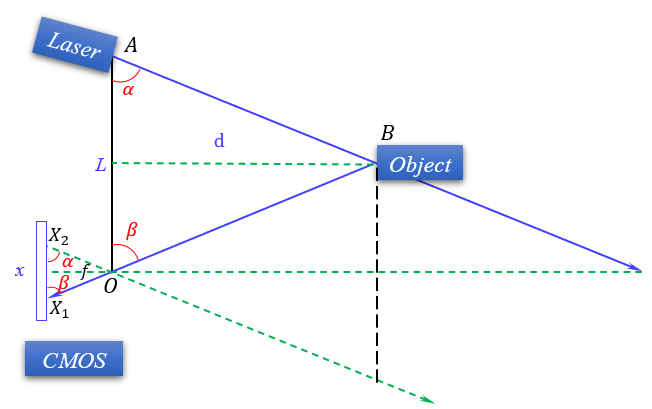

如图所示,为三角测距激光雷达的原理图。首先激光发射器(Laser)发射激光,打到物体(Object)表面时,将反射至CMOS相机处,经过相机焦点与图像交于 X 1 X_1 X1。
经过相机焦点O做激光的平行线交相机成像于 X 2 X_2 X2处, X 1 X 2 X_1X_2 X1X2间距离为 x x x,相机焦距为 f f f。
易得 △ O A B ∼ △ X 1 X 2 O \vartriangle OAB \sim \vartriangle {X_1}{X_2}O △OAB∼△X1X2O,则可以得到测量值d的表达式:
L x = d f d = f L x \frac{L}{x}=\frac{d}{f}\\ d=f\frac{L}{x} xL=fdd=fxL
式中, f f f为CMOS相机焦距大小; L L L为激光发射器与CMOS相机间距;参量 x x x可由三角函数得到:
x = f tan α + f tan β x = f sin ( α + β ) sin α sin β x=\frac{f}{\tan\alpha}+\frac{f}{\tan\beta}\\ x=f\frac{\sin(\alpha+\beta)}{\sin\alpha\sin\beta} x=tanαf+tanβfx=fsinαsinβsin(α+β)
其中, α \alpha α为激光发射器发射角度,角度 β \beta β可由相机内参矩阵计算得到。将x带入测量值表达式,进行化简:
d = L sin α sin β sin ( α + β ) d=L\frac{\sin\alpha\sin\beta}{\sin(\alpha+\beta)} d=Lsin(α+β)sinαsinβ
三角测距法参量表如下:
| 参量 | 含义 |
|---|---|
| α \alpha α | 激光发射角,标定后固定 |
| β \beta β | 相机接收角, |
| L L L | 激光发射器与相机间距离,标定后固定 |
| f f f | 相机焦距,固定值 |
| d d d | 激光测距值 |
| x x x | 中间变量,图像上 X 1 X 2 X_1X_2 X1X2间距离 |
测量特点
采用三角测距原理制成的激光雷达传感器具有以下特点:
- 成本低、价格便宜
- 中近距离精度较高
- 远距离精度较差
- 易受干扰,一般用于室内定位
当测量物体较远,即 d d d值较大时,所引起的 x x x变化较小,精度较差。
2.飞行时间TOF
测量原理
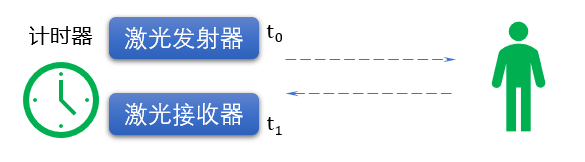
飞行时间(Time of flight)利用光速进行测距,若激光发射器在 t 0 t_0 t0时刻发射一束激光,打到物体上并反射,在 t 1 t_1 t1时刻激光接收器接收到,则测量距离可用如下表达式计算:
D = C ( t 1 − t 0 ) 2 D=C\frac{(t_1-t_0)}{2} D=C2(t1−t0)
式中, C C C表示光速 3 × 1 0 9 m / s 3\times10^9m/s 3×109m/s。
由于光速过快,对计时器精度要求高,测量精度1m对应时间精度ns;测量精度cm则对应时间精度ps。
故而,在实际应用中通常采用测量型号相位代替直接测量时间,如下图所示。
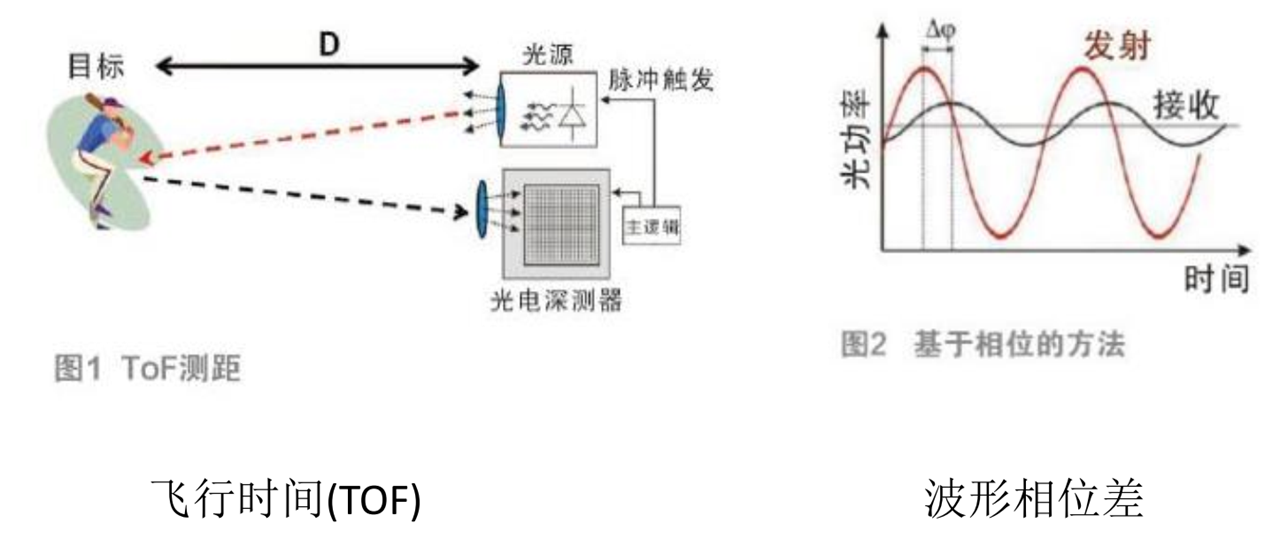
则时间可用相位差进行计算:
Δ t = Δ φ 2 π f m D = C Δ t 2 = C Δ φ 4 π f m \Delta t=\frac{\Delta\varphi}{2\pi f_m}\\ D=C\frac{\Delta t}{2}=C\frac{\Delta\varphi}{4\pi f_m} Δt=2πfmΔφD=C2Δt=C4πfmΔφ
时间测距的参量表如下:
| 参量 | 含义 |
|---|---|
| t 0 t_0 t0 | 激光发射时间 |
| t 1 t_1 t1 | 激光接收时间 |
| C C C | 光速 3 × 1 0 9 m / s 3\times10^9m/s 3×109m/s |
| Δ φ \Delta\varphi Δφ | 激光收发波形相位差 |
| D D D | 激光测距值 |
| f m f_m fm | 一个周期的频率 |
测量特点
采用飞行时间原理制成的激光雷达传感器特点如下:
- 价格昂贵
- 中远距离精度高、近距离较差
- 测距范围广
- 抗干扰能力强,可用于室外定位
当测量物体较近,即 D D D值较小时,由于对计时器精度较高,故而测量精度一般。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/140866.html原文链接:https://javaforall.net


