
大家好,又见面了,我是你们的朋友全栈君。
1 由于安装oracle之后,安装plsql都是自动检测orcl实例的ip及其端口,最近突然发现plsql连不上,于是尝试telnet 1521端口,于是发现端口连接失败的问题。经过几经摸索,解决了该问题。
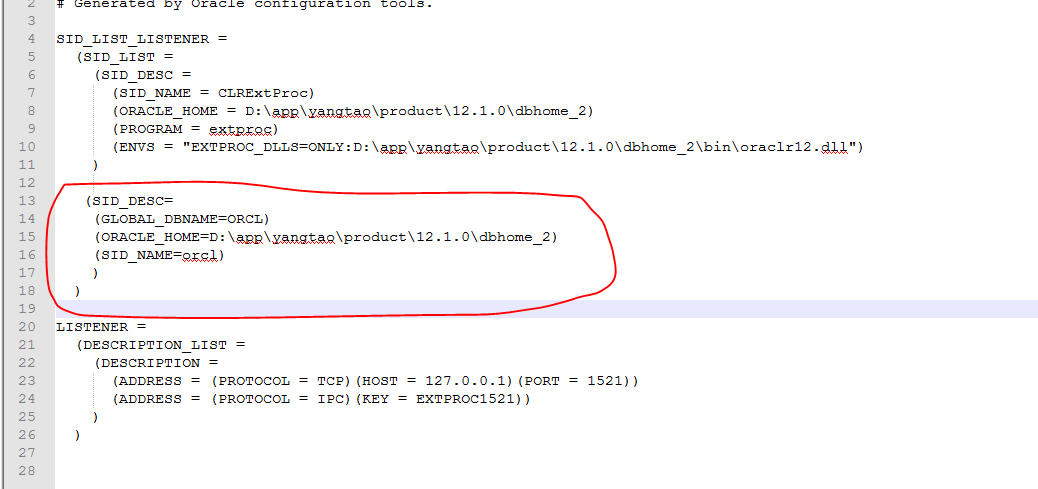
2 注意:安装的oracle11g,12c版本时,listener.ora 监听文件,没有自动添加红色圈里面的sid_name的设置,这点需要注意检查配置。

3 环境变量配置,也很重要,这是我本地的配置,缺一不可
(1) ORACLE_HOME : D:\app\yangtao\product\12.1.0\dbhome_2
(2) ORACLE_SID: ORCL(实例名)
(3) PATH: D:\app\yangtao\product\12.1.0\dbhome_2\BIN
(4) TNS_ADMIN: D:\app\yangtao\product\12.1.0\dbhome_2\NETWORK\ADMIN
4 最后检查 tnsnames.ora文件,这个比较简单
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/142671.html原文链接:https://javaforall.net


