
大家好,又见面了,我是你们的朋友全栈君。
最近在学习机器人学导论,老师发来一个.m文件,构建了一个机器人,然后让这个机器人末端画圆。然而我遇到了很多问题。
先上代码
%定义连杆
% theta d a alpha
L1 = Link([0 138 0 -pi/2]);
L2 = Link([0 0 135 0]);
L3 = Link([0 0 147 0]);
%定义关节角范围
L1.qlim = [deg2rad(-90) deg2rad(90)];
L2.qlim = [deg2rad(0) deg2rad(85)];
L3.qlim = [deg2rad(-90) deg2rad(10)];
%连接连杆
dobot = SerialLink([L1 L2 L3],'name','Dobot');
%定义圆
N = (0:0.5:100)';
center = [175 0 5];
radius = 50;
theta = ( N/N(end) )*2*pi;
points = (center + radius*[cos(theta) sin(theta) zeros(size(theta))])';
plot3(points(1,:),points(2,:),points(3,:),'r');
%pionts矩阵是“横着”的,取其转置矩阵,进一步得到其齐次变换矩阵
T = transl(points');
%当反解的机器人对象的自由度少于6时,要用mask vector进行忽略某个关节自由度%
q = dobot.ikine(T,'mask',[1 1 1 0 0 0]);
hold on;
dobot.plot(q,'tilesize',300)
问题一、 文件名有问题,导致.m文件无法执行


文件名为 dobot+robot.m 其中有‘+’,无法正确执行启动的代码
解决办法:
重命名为dobot_robot.m
也可以选中所有代码,右键,执行所选内容
问题二、程序执行时报错
错误使用 SerialLink/fkine (line 85)
q must have 3 columns
出错 SerialLink/jacob0 (line 61)
Tn = fkine(robot, q); % end-effector transformation
出错 SerialLink/ikine (line 153)
J0 = jacob0(robot, q);
出错 dobot_robot (line 25)
q = dobot.ikine(T,'mask',[1 1 1 0 0 0]);
错误出现在这一行q = dobot.ikine(T,‘mask’,[1 1 1 0 0 0]);
ikine函数用于逆运动学求解,使用help指令查看帮助,找到ikine的用法
Q = R.ikine(T, Q0, M, OPTIONS)
其中T表示位姿,Q0表示初始状态,M是指几轴运动
本例中T已经计算好了,是一个圆;
Q0初始为0,这里应该为[0 0 0];
dobot为3轴机器人,这里M为[1 1 1 0 0 0];
解决办法
修改这一行为q = dobot.ikine(T,[0 0 0],[1 1 1 0 0 0]);
修改后运行程序,正常运行,弹出画面,但是不完整,明显缺少上面一块
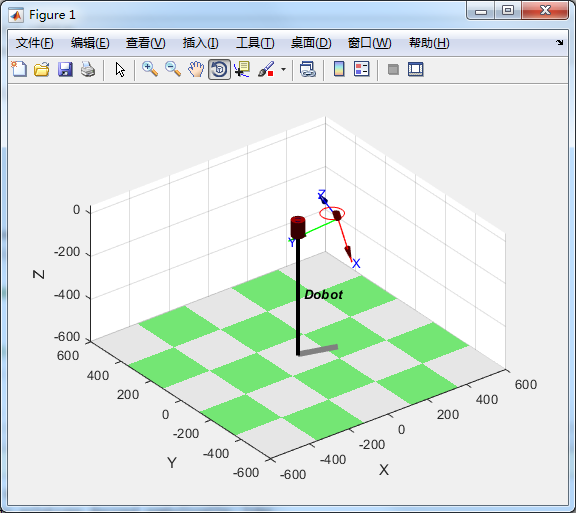
可能因为先画的圆,导致坐标系不完整,这里在画圆后加一行机器人的显示
dobot.plot([0 0 0]);
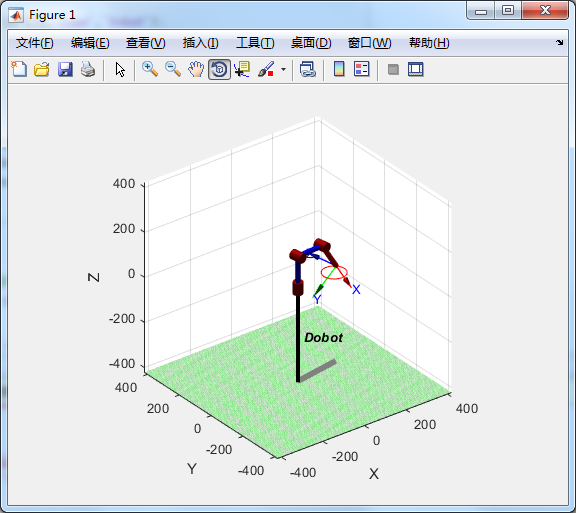
机器人果然动起来了
附上最后代码
%定义连杆
% theta d a alpha
L1 = Link([0 138 0 -pi/2]);
L2 = Link([0 0 135 0]);
L3 = Link([0 0 147 0]);
%定义关节角范围
L1.qlim = [deg2rad(-90) deg2rad(90)];
L2.qlim = [deg2rad(0) deg2rad(85)];
L3.qlim = [deg2rad(-90) deg2rad(10)];
%连接连杆
dobot = SerialLink([L1 L2 L3],'name','Dobot');
%定义圆
N = (0:0.5:100)';
center = [175 0 5];
radius = 50;
theta = ( N/N(end) )*2*pi;
points = (center + radius*[cos(theta) sin(theta) zeros(size(theta))])';
plot3(points(1,:),points(2,:),points(3,:),'r');
dobot.plot([0 0 0]);%显示机器人初始状态
%pionts矩阵是“横着”的,取其转置矩阵,进一步得到其齐次变换矩阵
T = transl(points');
%当反解的机器人对象的自由度少于6时,要用mask vector进行忽略某个关节自由度%
q = dobot.ikine(T,[0 0 0],[1 1 1 0 0 0]);
hold on;
dobot.plot(q,'tilesize',300)
matlab版本2017a
Robotics Toolbox 版本 9.10.0
说的有点啰嗦,以上是我解决这次问题的步骤,记录下来,希望能帮助到有相同问题的人。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/150868.html原文链接:https://javaforall.net


