
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
原题链接
设有 N×N 的方格图,我们在其中的某些方格中填入正整数,而其它的方格中则放入数字0。如下图所示:
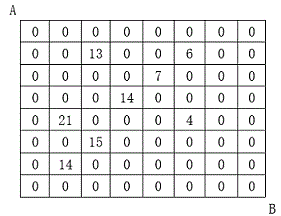

某人从图中的左上角 A 出发,可以向下行走,也可以向右行走,直到到达右下角的 B 点。
在走过的路上,他可以取走方格中的数(取走后的方格中将变为数字0)。
此人从 A 点到 B 点共走了两次,试找出两条这样的路径,使得取得的数字和为最大。
输入格式
第一行为一个整数N,表示 N×N 的方格图。
接下来的每行有三个整数,第一个为行号数,第二个为列号数,第三个为在该行、该列上所放的数。
行和列编号从 1 开始。
一行“0 0 0”表示结束。
输出格式
输出一个整数,表示两条路径上取得的最大的和。
数据范围
N≤10
输入样例:
8
2 3 13
2 6 6
3 5 7
4 4 14
5 2 21
5 6 4
6 3 15
7 2 14
0 0 0
输出样例:
67
题解
正着走一边和倒着走一边,等价于正着走两边。设f[i][j][k]:待变第一个走到(i,j)并且第二次走到(k,i+j-k)时最大值,状态转移方程为:有四个方向可以走到状态f[i][j][k]。
#include<bits/stdc++.h>
#include<cmath>
#define x first
#define y second
#define send string::npos
#define lowbit(x) (x&(-x))
#define left(x) x<<1
#define right(x) x<<1|1
using namespace std;
typedef long long ll;
typedef pair<int,int> PII;
typedef struct Node * pnode;
const int N = 1e1 + 10;
const int M = 5e5 + 10;
const int INF = 0x3f3f3f3f;
const ll LINF = 0x3f3f3f3f3f3f3f3f;
const int Mod = 4e8;
int a[N][N];
int f[N][N][2 * N];
int main(){
int n,x,y,w;
cin>>n;
while(cin>>x>>y>>w,!(x == 0 && y == 0 && w == 0)){
a[x][y] = w;
}
for(int k = 2;k <= n;k ++)
for(int i = 1;i <= n;i ++)
for(int j = 1;j <= n;j ++){
if(i + j - k <= n|| i + j - k >= 1){
// if(k - i <= 0)continue;
int v = a[i][j];
if(i != k)v += a[k][i + j - k];
f[i][j][k] = f[i - 1][j][k - 1];
f[i][j][k] = max(f[i][j][k],f[i][j - 1][k]);
f[i][j][k] = max(f[i][j][k],f[i - 1][j][k]);
f[i][j][k] = max(f[i][j][k],f[i][j - 1][k - 1]);
f[i][j][k] += v;
}
}
cout<<f[n][n][n];
return 0;
}
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/169174.html原文链接:https://javaforall.net

![开源阅读书源_阅读3.20.0518追书神器 海量书源 免费开源无广告[通俗易懂]](https://javaforall.net/wp-content/uploads/2020/11/2020110817443450-480x300.jpg)
