
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
1、 打开浏览器输入IP加端口8834登录Nessus
2、 输入账号密码,均为admin

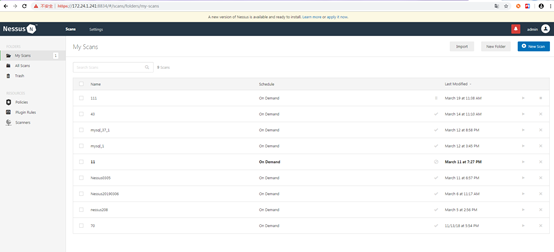
3、 登录成功后,进入到首页
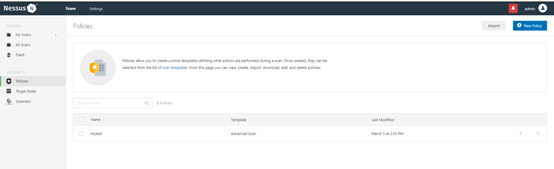
4、 点击侧边栏policies,显示策略界面

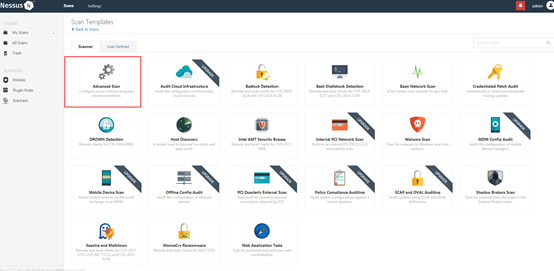
5、 点击new policy,显示策略模板
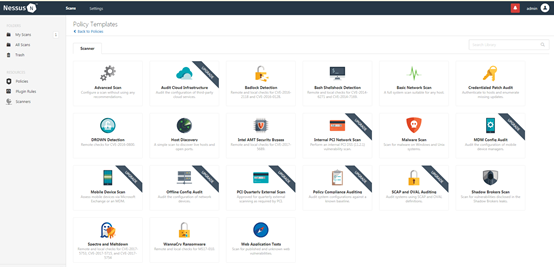
6、 选择advanced scan,填写策略名称
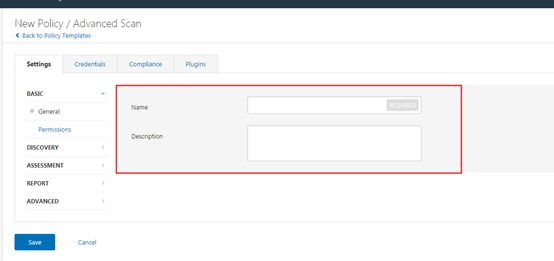
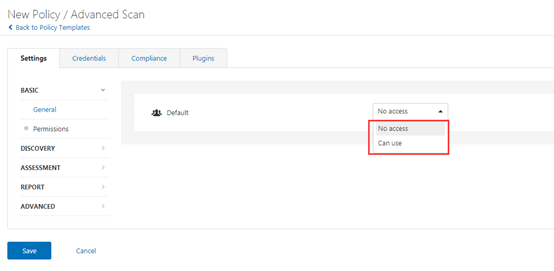
7、 点击permission,选择can use,设置所有人可用
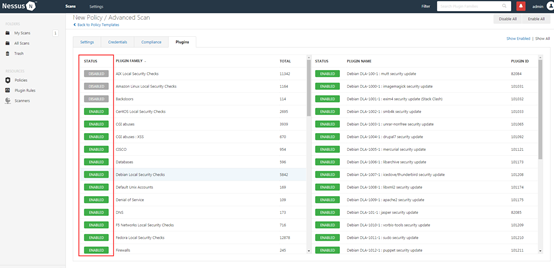
8、 单击Plugins标签,该界面显示了所有插件程序,默认全部是启动的enabled。在该界面可以单击右上角Disable All按钮,禁用所有启动的插件程序。或直接点击enabled状态,即可禁用该插件。
9、 点击save即可看到新增的策略,表示该策略创建成功。
10、 策略创建成功后,必须要新建扫描任务才能实现漏洞扫描。点击My Scans到新增扫描任务界面,点击New scan新建扫描任务。可以选择默认扫描策略。
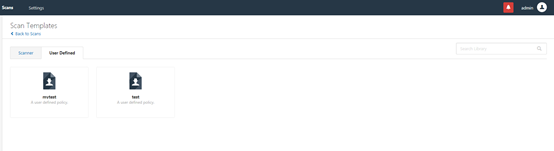
11、 也可以点击user Defined选择自定义添加的扫描策略
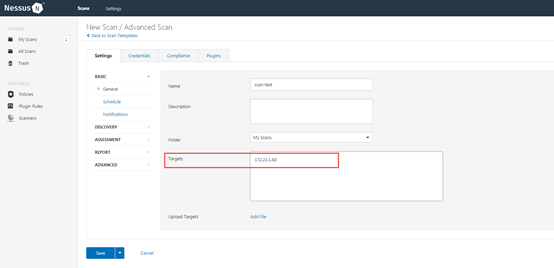
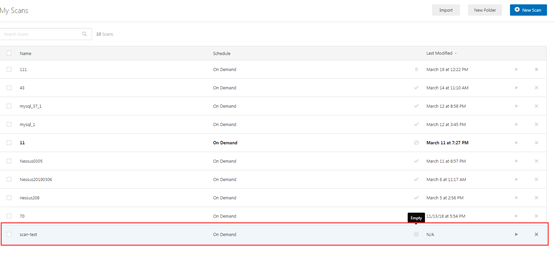
12、 输入任务名称,扫描IP地址。点击save即可看到新增的扫描任务。
13、 新增的扫描任务状态为空
14、 点击launch,启动扫描任务,可看到任务正在running,可停止或者暂停扫描任务

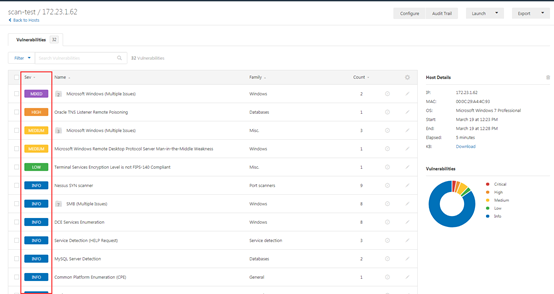
15、 扫描完成后即显示completed,点击该任务即可查看到扫描报告。右侧显示详细扫描任务详细信息,如扫描任务名称、状态、策略、扫描时间等。右下角以圆形图显示了漏洞的危险情况,分别使用不同颜色显示漏洞的严重性。
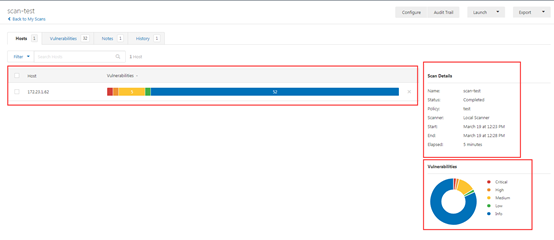
16、 关于漏洞的信息使用在该界面可以单击Host列中的显示的地址,显示扫描主机的漏洞情况,该列中的数字表示扫描到的信息数。本例中选择172.24.1.62地址。使用的自定义策略。
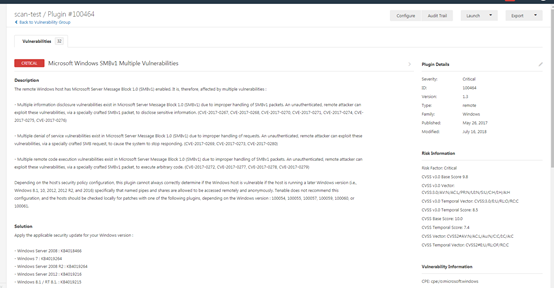
17、 点击某一漏洞,将显示具体的漏洞信息
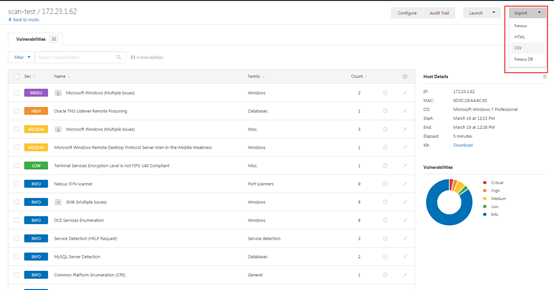
18、 点击export,即可导出扫描报告,可选择Nessus、HTML、CSV和Nessus DB格式
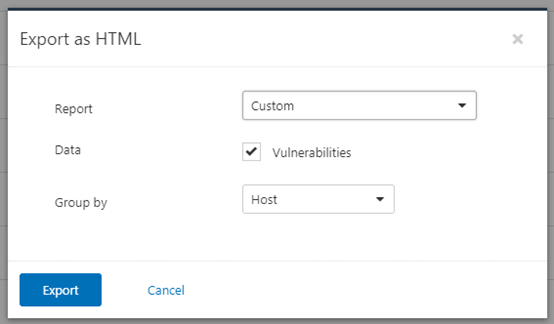
19、 选择custom点击export可下载
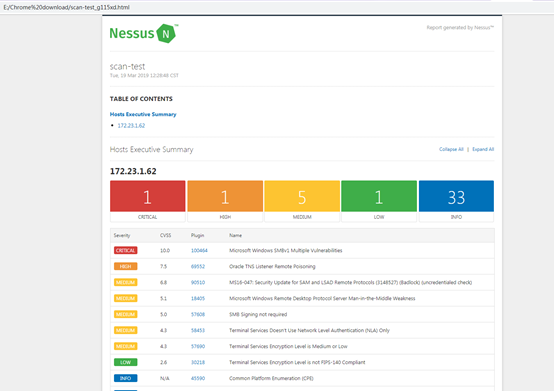
20、 导出摘要显示如图
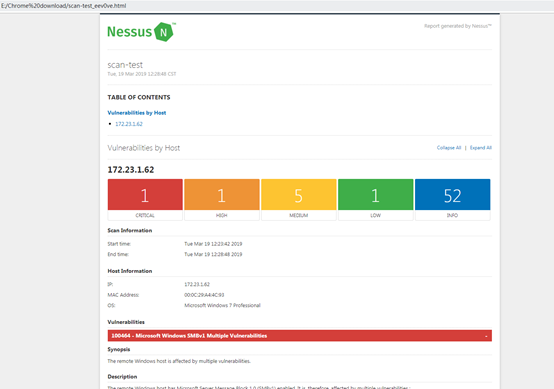
导出详细报告显示如图
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/180286.html原文链接:https://javaforall.net


