
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
运动控制器作为数控系统的核心部件,在高端机器人、数控机床、工业自动化等领
域得到了广泛的应用。
本文以实际工程应用为背景,以研制高效、高可靠性、功能丰富的运动控制器为目标,对运动控制器及运动控制算法进行了研究与分析,对于实现高速、高效、高精度的 运动控制具有重要的理论意义和实际应用价值。
基于
ARM+FPGA
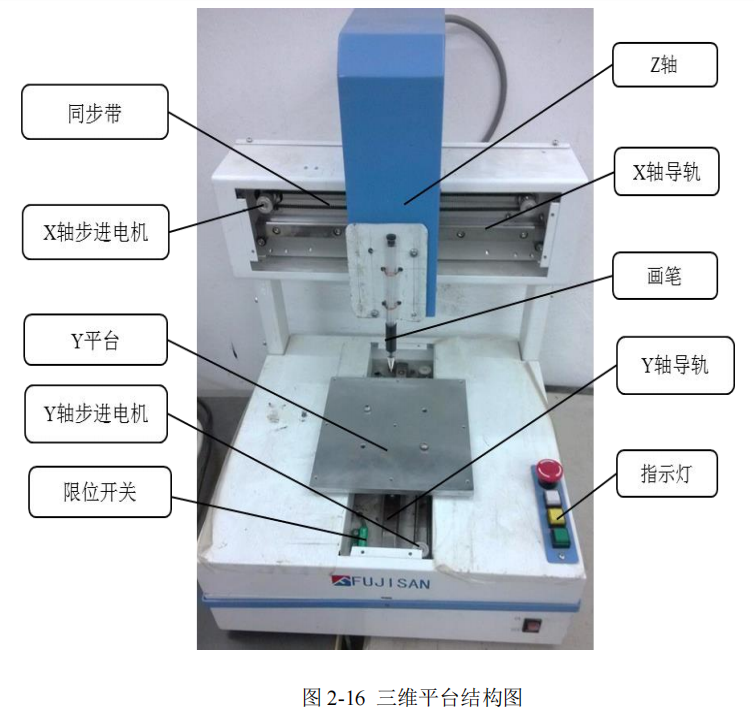
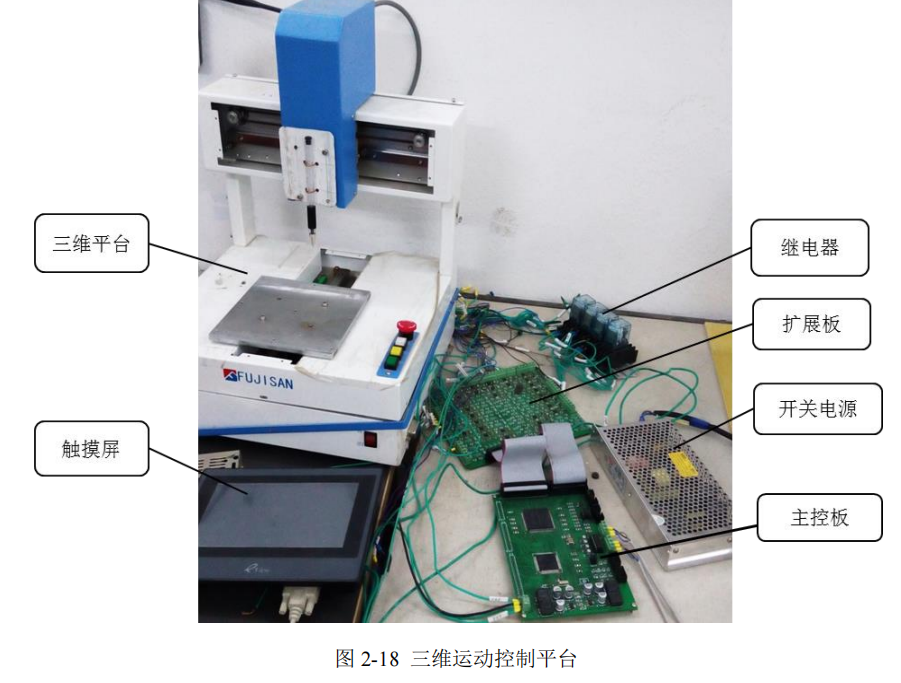
的硬件架构,提出了硬件设计的总体方案。设计了运动控制器的 硬件电路及主控制板和扩展板,搭建了三维运动控制平台。 提出了运动控制器软件设计的总体方案,基于 MODBUS
协议,设计了串口通信程 序;设计了动态链表,将上位机(触摸屏)的运动控制信息,存储到外部的 EEPROM
, 为实际操作提供了方便。基于 Verilog HDL
硬件描述语言设计了
ARM
与
FPGA
的通信 模块和加减速模块;设计了 HMI
控制界面,实现了人机交互。
ARM+FPGA
的硬件架构,提出了硬件设计的总体方案。设计了运动控制器的 硬件电路及主控制板和扩展板,搭建了三维运动控制平台。 提出了运动控制器软件设计的总体方案,基于 MODBUS
协议,设计了串口通信程 序;设计了动态链表,将上位机(触摸屏)的运动控制信息,存储到外部的 EEPROM
, 为实际操作提供了方便。基于 Verilog HDL
硬件描述语言设计了
ARM
与
FPGA
的通信 模块和加减速模块;设计了 HMI
控制界面,实现了人机交互。
分析了传统逐点比较法平面直线和圆弧插补的基本原理及实现过程,并利用 MATLAB 进行了仿真验证。研究了改进后的逐点比较法平面直线和圆弧的插补,通过 仿真对比可知,改进后的插补算法具有更高的插补效率;研究了利用逐点比较法实现空 间直线插补的具体步骤。对一种空间圆弧插补算法进行了分析,仿真结果表明,该算法 使得插补点均位于圆弧上,不存在累积误差。
阐述了梯形以及
S
曲线加减速算法的实现过程,在分析步进电机矩频特性和加减速 特性的基础上,对步进电机加减速曲线的离散方法及速度数据表的建立方法进行了研究。
S
曲线加减速算法的实现过程,在分析步进电机矩频特性和加减速 特性的基础上,对步进电机加减速曲线的离散方法及速度数据表的建立方法进行了研究。
最后,对运动控制器的性能及算法进行了测试,结果表明,本文设计开发的运动控 制器功能和性能良好。该运动控制器已经应用于点胶机等自动化设备的控制领域,具备 良好的应用前景。
目前,以嵌入式处理器为基础开发的数控系统主流架构形式有如下几种
[38,39]
:
[38,39]
:
(
1
)
ARM+DSP
的架构:通过
DSP
的强大浮点计算能力来分担
ARM
数据处理的
1
)
ARM+DSP
的架构:通过
DSP
的强大浮点计算能力来分担
ARM
数据处理的
任务,系统实时性得到了保证,但是对电机数以及开关量数量的控制有限。
(2)
ARM +FPGA/CPLD
的架构:这种形式接口处理能力得到了有效的扩展,但是
ARM +FPGA/CPLD
的架构:这种形式接口处理能力得到了有效的扩展,但是
插补算法及其他运算都由
ARM
来承担,如果
ARM
数据计算能力不足,控制系统的精
ARM
来承担,如果
ARM
数据计算能力不足,控制系统的精
度和实时性都会受到影响。
(3)
ARM +DSP+FPGA/CPLD
的架构:这种形式能充分利用
ARM
的数据处理能
ARM +DSP+FPGA/CPLD
的架构:这种形式能充分利用
ARM
的数据处理能
力和
DSP
以及
FPGA
实时计算、接口处理能力,但是结构复杂,不利于维护和开发。
DSP
以及
FPGA
实时计算、接口处理能力,但是结构复杂,不利于维护和开发。
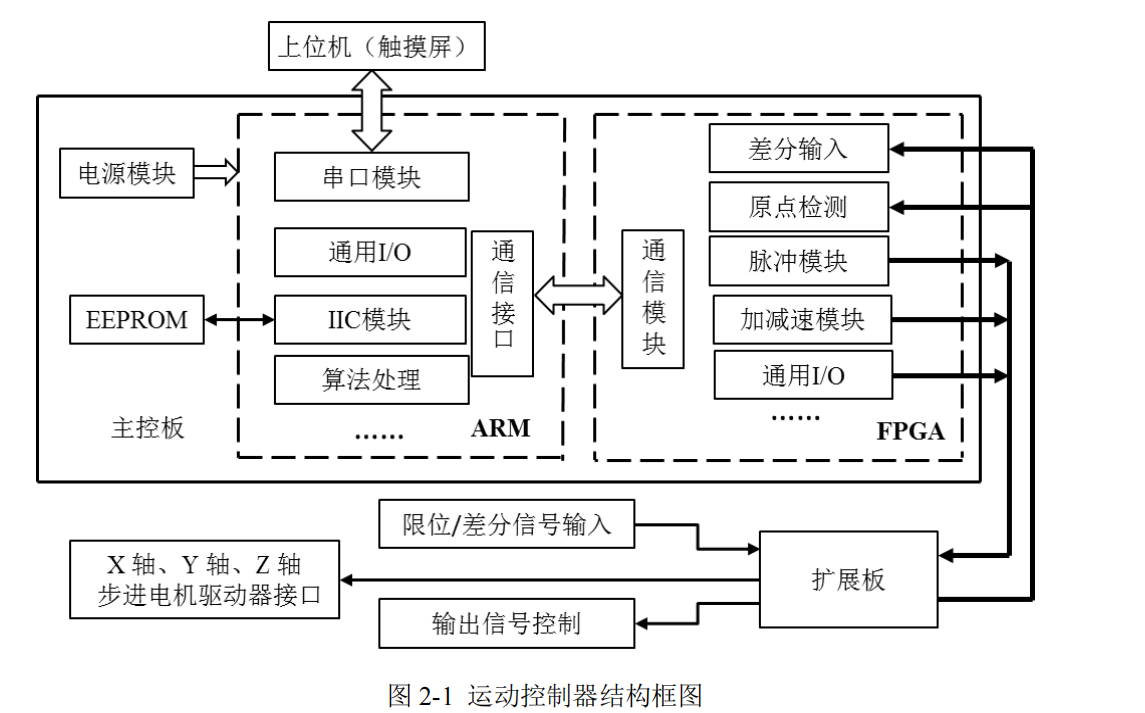
通过以上分析,考虑到系统实时性要求、数据处理要求和实际应用的需要,本课题
研究的运动控制器硬件系统采用
ARM+FPGA
的架构形式。采用
ARM
为主控制芯片,
ARM+FPGA
的架构形式。采用
ARM
为主控制芯片,
主要完成插补算法、人机交互、数据存储等控制,辅助芯片
FPGA
则完成各轴脉冲并行
FPGA
则完成各轴脉冲并行
输出、输出控制(如通过继电器控制开关动作)、加减速控制、原点位置的检测、通讯
模块的处理,差分输入信号的处理等功能,运动控制器的结构框图如
2-1
所示。
2-1
所示。

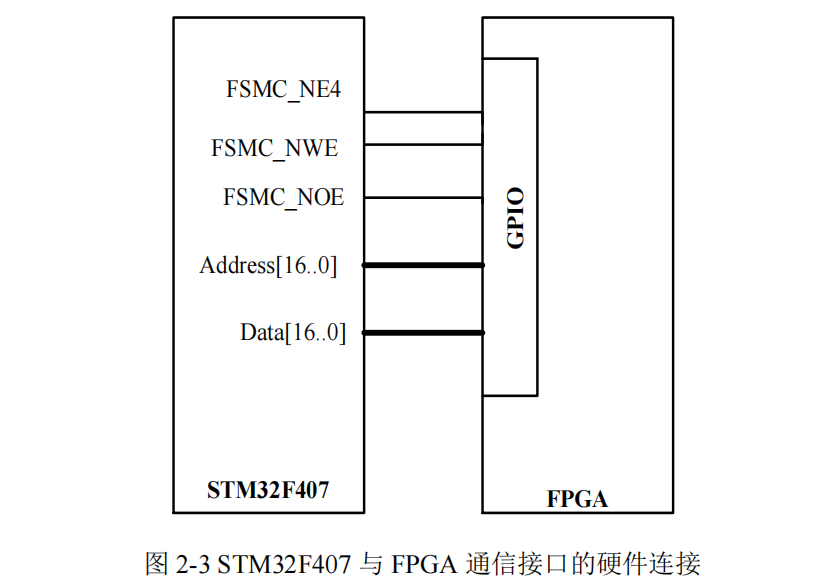
考虑到控制系统的实时性和灵活性的要求,选用
ST
公司生产的
STM32F407
为主控
ST
公司生产的
STM32F407
为主控
芯片。
对于
FPGA
芯片的选择,首先得考虑到引脚资源以及接口电平是否和
STM32F407
FPGA
芯片的选择,首先得考虑到引脚资源以及接口电平是否和
STM32F407
相匹配,同时平台开发的成本、手册资料是否齐备等问题也是需要考虑的重要部分。综
合多项因素,本文所述运动控制器选用的
FPGA
芯片为
Altera
公司的
EP2C8Q208C8N。
FPGA
芯片为
Altera
公司的
EP2C8Q208C8N。
FPGA
除了与
STM32F407
进行通信外,还需要对步进电机及输入输出信号进行控
除了与
STM32F407
进行通信外,还需要对步进电机及输入输出信号进行控
制,但是
FPGA
的驱动能力非常有限,并不能直接用于步进电机驱动器等的控制,需要
FPGA
的驱动能力非常有限,并不能直接用于步进电机驱动器等的控制,需要
将电平进行转化,才能实现相应的功能;本文设计的扩展板包括
4
路脉冲输出电路、
20
4
路脉冲输出电路、
20
路输入输出隔离电路。
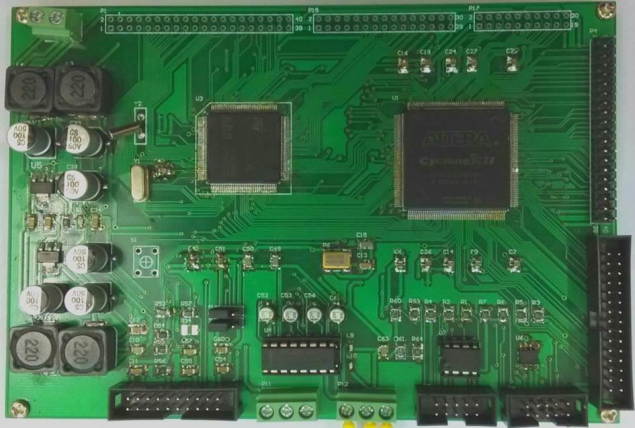
2-15
主控板实物图
主控板实物图
Ethercat部分待补充。
欢迎技术交流,获取更多资源。v: 13670212541
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/181887.html原文链接:https://javaforall.net


