
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
最近终于有了一篇的顶会像样的RGBD tracking的论文了:
ICCV2021: DepthTrack: Unveiling the Power of RGBD Tracking
Github: https://github.com/xiaozai/DeT
数据集简介
这边看完就随手记录一下关键的部分:主要是创建了个大规模的RGBD tracking benchmark: DepthTrack (有数据集之后才能促进算法的研究),当然随之也搞了个baseline tracker—DeT, 这也是现在搞dataset contribution的基本套路。


新创建的数据集DepthTrack比以往的RGBD Tracking的数据集具有以下的特点:
- 序列数较多: 训练和测试训练分别有150和50个(github上提供了修改后的151个训练序列),训练集有218,201帧,测试集有76,390帧
- 场景有40个,目标有90个,数据多样性方面显得更加丰富了,采自intel realsense415,自动模态同步,分辨率为640×360, 30fps
- DepthTrack视频平均帧数为1473,可以看做是一个长时的跟踪数据集(因为短时的RGB tracker现在已经基本解决了,特别是最近出现的transformer-based的已经到达RGB的天花板了。所以新出的RGBD不能太简单,否则直接用RGB信息就刷爆了;再者评价指标用的也是和VOT LT一样的P-R曲线和F-Score)
- 该数据集的测试集曾作为VOT2021 RGBD的隐藏集来选出最终该赛道的冠军
数据集为了对RGB Tracker更具有挑战性,也为了突出Depth信息真的有助于RGBD Tracker的学习,部分序列会针对RGB Tracker中还存在的几方面的属性进行收集。比如黑暗场景,目标和背景颜色纹理相似,形变物体,相似物体。确实,这才是多模态数据提出来更主要的意义。(据我了解,轻微的遮挡对于transformer-based 的RGB Tracker已经不是太大问题了)
baseline性能
先放几张VOT RGBD2021的结果图,上边的是在公开集CDTB上测出来的,下面是选出在公开集上的前三名和组委会自己选的几个往年好的tracker在隐藏集上(也就是现在的DepthTrack的测试集)的性能,这里面的算法多半只是把depth信息当做一个sidekick,但是会用很多个tracker一起融合出结果,比较sophisticated

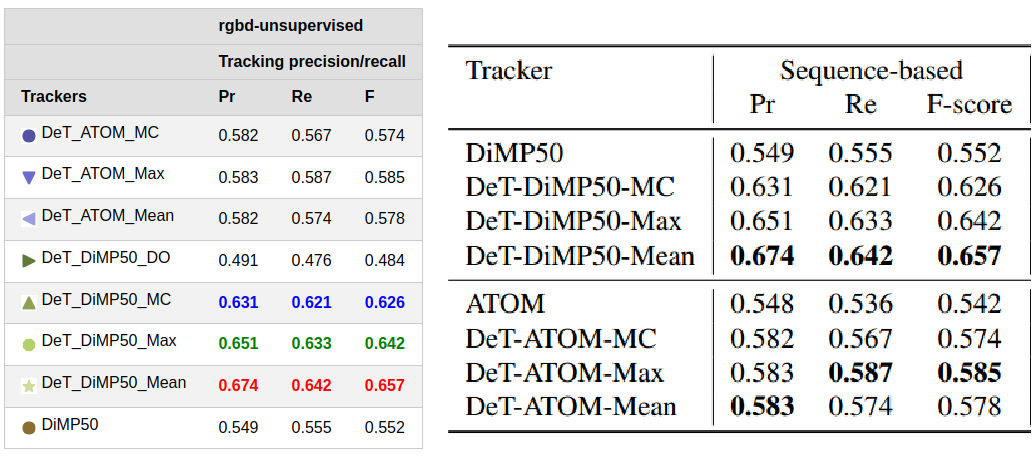
然后是论文里面的baseline DeT的性能:
主要看Sequence-based的评测就好了,这个是和上面用的一样的方法。但是还是有点尴尬,似乎不及上面的冠军,也只能排个第二,但是毕竟人家只是一个simple baseline,还有发挥的空间。

DeT代码
先放几张框架图


具体代码和原初ATOM和DIMP代码是差不多的。就是增加了对depth image的backbone特征提取,在代码用的color image和rgb image合并成一个6通道的输入到backbone里面,然后merge两个模态下的reference和test特征,具体就是max或者mean或者mul,这几个操作都是element-wise的,所以得到的tensor就是和原初ATOM和DIMP的是一样的,所以送入后面进行iou预测过程就都一样了,整体改动是比较容易的。基本还是延续了benckmark+baseline=paper的模式,说明还是有很大提升空间的。具体请看ltr/models/bbreg/atom.py文件即可清楚
DepthTrack的test评估
说到这个的评估,不得不说到CDTB(也就是VOT RGBD2019和VOT RGBD2020的公开集,当时也没有隐藏集,所以冠军也是通过在其上评估排名得到的),像RGBD都是one pass evaluation的(也就是rgbd-unsupervised),所以可以先跑完再用toolkit进行评估。
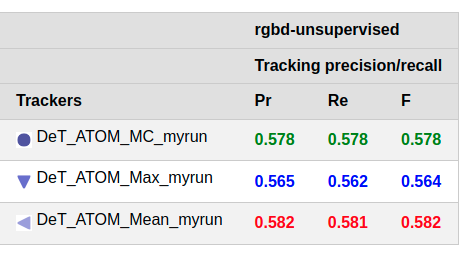
我评估出来和论文里面的值是一模一样的:
我自己跑出来的结果:
评估很简单,只要做好下面几方面:
- 下载好CDTB数据集(不会下的可以去看我的这篇博客,把它放在你创建的workspace下的sequences文件夹里面,或者直接去这里面获取下载链接)
- 从上面的github里面获得在CDTB上的结果,把它放在你创建的workspace下的results文件夹里下
- 编写
trackers.ini,内容如下(command任意不用管):[DeT_ATOM_MC] # <tracker-name> protocol = traxpython command = jjjjj [DeT_ATOM_Max] # <tracker-name> protocol = traxpython command = jjjjj [DeT_ATOM_Mean] # <tracker-name> protocol = traxpython command = jjjjj [DeT_DiMP50_DO] # <tracker-name> protocol = traxpython command = jjjjj [DeT_DiMP50_MC] # <tracker-name> protocol = traxpython command = jjjjj [DeT_DiMP50_Max] # <tracker-name> protocol = traxpython command = jjjjj [DeT_DiMP50_Mean] # <tracker-name> protocol = traxpython command = jjjjj [DiMP50] # <tracker-name> protocol = traxpython command = jjjjj然后运行
vot analysis --workspace <your_workspace_dir> DeT_ATOM_MC DeT_ATOM_Max DeT_ATOM_Mean DeT_DiMP50_DO DeT_DiMP50_MC DeT_DiMP50_Max DeT_DiMP50_Mean DiMP50 --format html,就可以出结果了。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/194043.html原文链接:https://javaforall.net

![php curl 请求头、响应头[通俗易懂]](https://javaforall.net/wp-content/uploads/2020/11/2020110817443450-480x300.jpg)
