
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
总结一下这两天安装ROS的过程。
1 配置软件库
桌面左侧栏 点search your computer,输入updates,点 Software & Updates,将main,universe,multiuniverse,restricted全都勾上,将Download from换成中科大的 http://mirrors.ustc.edu,cn/ubuntu 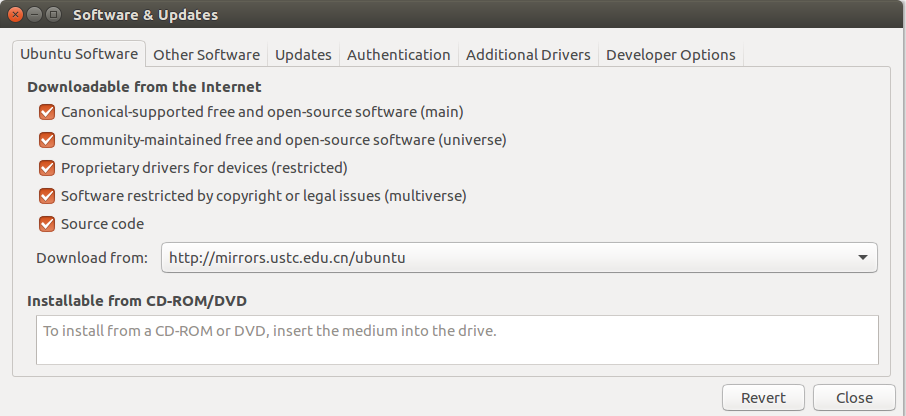

2 设置软件源
打开/etc/apt/sources.list,将以下内容加入。编辑之前可以先进行备份。
deb http://debian.ustc.edu.cn/ubuntu/ trusty main multiverse restricted universe
deb http://debian.ustc.edu.cn/ubuntu/ trusty-backports main multiverse restricted universe
deb http://debian.ustc.edu.cn/ubuntu/ trusty-proposed main multiverse restricted universe
deb http://debian.ustc.edu.cn/ubuntu/ trusty-security main multiverse restricted universe
deb http://debian.ustc.edu.cn/ubuntu/ trusty-updates main multiverse restricted universe
deb-src http://debian.ustc.edu.cn/ubuntu/ trusty main multiverse restricted universe
deb-src http://debian.ustc.edu.cn/ubuntu/ trusty-backports main multiverse restricted universe
deb-src http://debian.ustc.edu.cn/ubuntu/ trusty-proposed main multiverse restricted universe
deb-src http://debian.ustc.edu.cn/ubuntu/ trusty-security main multiverse restricted universe
deb-src http://debian.ustc.edu.cn/ubuntu/ trusty-updates main multiverse restricted universe
如果是用sudo gedit /etc/apt/sources.list打开的,可能无法编辑(文本只读),我使用的是下面的命令
sudo nano /etc/apt/sources.list
保存之后,执行
sudo apt-get update
sudo apt-get upgrade
3 按照指导安装
接下来的步骤参考官网教程就好。
4 遇到的问题及解决
4.1 配置软件库的错误
在关闭Software & Updates时候需要reload。如果reload结果是这样的
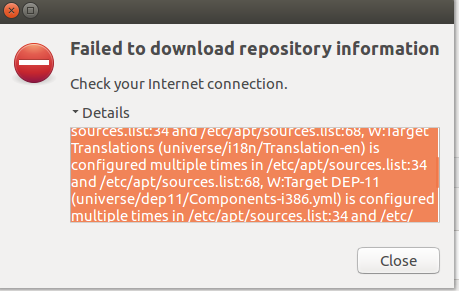
又或者是你在sudo apt-get update的时候报这种错:
W: Target Packages (universe/binary-i386/Packages) is configured multiple times in /etc/apt/sources.list:10 and /etc/apt/sources.list:64
W: Target Packages (universe/binary-all/Packages) is configured multiple times in /etc/apt/sources.list:10 and /etc/apt/sources.list:64
W: Target Translations (universe/i18n/Translation-en_US) is configured multiple times in /etc/apt/sources.list:10 and /etc/apt/sources.list:64
W: Target Translations (universe/i18n/Translation-en) is configured multiple times in /etc/apt/sources.list:10 and /etc/apt/sources.list:64
说明你在sources.list里面有两个相同的软件源,它们的后缀可能不一样(比如有的是main,有的是restricted,有的可能是包含关系如restricted 和 main restricted 等)。将多余的删掉。我是将重复的删去一个,将包含与被包含的删除被包含的。之后再重新sudo apt-get update就可以了。
4.2 设置软件源的错误
我曾在sources.list里面将
http://packages.ros.org/ros/ubuntu $(lsb_release Release
改成了
http://packages.ros.org/ros/ubuntu trusty
之后就变成了下面的错误
W: The repository ‘http://ppa.launchpad.net/fcitx-team/nightly/ubuntu xenial Release’ does not have a Release file.
N: Data from such a repository can’t be authenticated and is therefore potentially dangerous to use.
N: See apt-secure(8) manpage for repository creation and user configuration details.
E: Failed to fetch http://ppa.launchpad.net/fcitx-team/nightly/ubuntu/dists/xenial/main/binary-i386/Packages 404 Not Found
E: Some index files failed to download. They have been ignored, or old ones used instead.
然后我在software&update->other software里面把
http://ppa.launchpad.net/fcitx-team/nightly/ubuntu xenial Release
的勾选去掉了,就不会报does not have a Release file的错误了。
4.3 按照官网教程安装时出现的错误
执行到Set up your keys这一步的时候,出错
gpg: requesting key B01FA116 from hkp server ha.pool.sks-keyservers.net
gpgkeys: key 421C365BD9FF1F717815A3895523BAEEB01FA116 can’t be retrieved
gpg: no valid OpenPGP data found.
gpg: Total number processed: 0
gpg: keyserver communications error: keyserver helper general error
gpg: keyserver communications error: unknown pubkey algorithm
gpg: keyserver receive failed: unknown pubkey algorithm
受[2]的启发,我将宿主机上的蓝灯关掉了,就没错了。
接着我执行
sudo apt-get update
报错
Err:15 http://10.0.0.167/files/51160000022738DE/packages.ros.org/ros/ubuntu xenial/main i386 Packages
Hash Sum mismatch
Fetched 554 kB in 1s (315 kB/s)
Reading package lists… Done
E: Failed to fetch http://10.0.0.167/files/51160000022738DE/packages.ros.org/ros/ubuntu/dists/xenial/main/binary-i386/Packages.gz Hash Sum mismatch
E: Some index files failed to download. They have been ignored, or old ones used instead.
网上说这个错误应该跟GFW有关,于是我又重新打开了蓝灯,再执行一次,没错了
接着执行
sudo apt-get install ros-kinetic-desktop-full
报错
Some packages could not be installed. This may mean that you have
requested an impossible situation or if you are using the unstable
distribution that some required packages have not yet been created
or been moved out of Incoming.
The following information may help to resolve the situation:
The following packages have unmet dependencies:
ros-kinetic-desktop-full : Depends: ros-kinetic-desktop but it is not going to be installed
Depends: ros-kinetic-perception but it is not going to be installed
Depends: ros-kinetic-simulators but it is not going to be installed
Depends: ros-kinetic-urdf-tutorial but it is not going to be installed
E: Unable to correct problems, you have held broken packages.
按照[3]中的方法,我执行
sudo apt-get update && sudo apt-get upgrade
在结果中出现了
The following packages have been kept back:
linux-generic-hwe-16.04 linux-headers-generic-hwe-16.04
linux-image-generic-hwe-16.04
0 upgraded, 0 newly installed, 0 to remove and 3 not upgraded.
于是我分别执行
sudo apt-get install linux-generic-hwe-16.04 linux-headers-generic-hwe-16.04
sudo apt-get install linux-image-generic-hwe-16.04
但是还是没能解决上面Depends的错误,于是我照[4]中的办法来做,同时又按照[5]中的办法手动安装缺失的依赖包。之后再重新执行sudo apt-get install ros-kinetic-desktop-ful,这会终于成功了!
参考资料
[1]https://blog.csdn.net/qq_37193603/article/details/72900797
[3]https://answers.ros.org/question/243920/how-to-install-ros-kinetic-ubuntu-1604/
[4]https://blog.csdn.net/xiangxianghehe/article/details/78483799
[5]https://blog.csdn.net/l_h2010/article/details/46831245
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/195171.html原文链接:https://javaforall.net


