
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
扣扣技术交流群:460189483
没有安装Ubuntu18.04LTS的自行安装,安装过程祥见我的另一篇文章,地址如下
https://blog.csdn.net/u014453443/article/details/88049804
下面开始记录ubuntu18.04 LTS安装ROS的详细图文教程
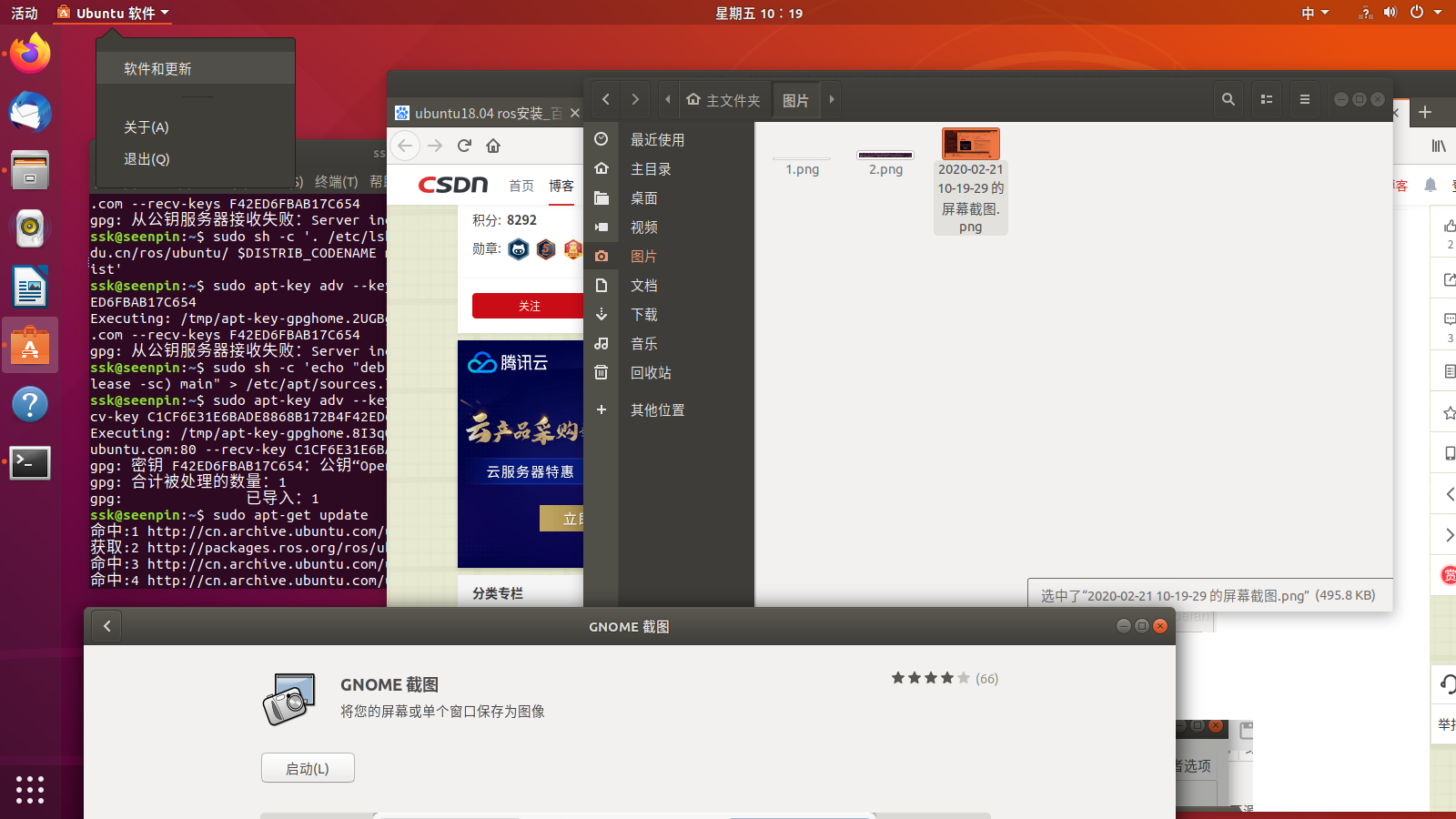
1. 找到‘软件和更新’,修改里面的下载源。点击桌面的ubuntu软件图表,然后在左上角ubuntu软件上点击左键,选择软件和更新,如下图所示

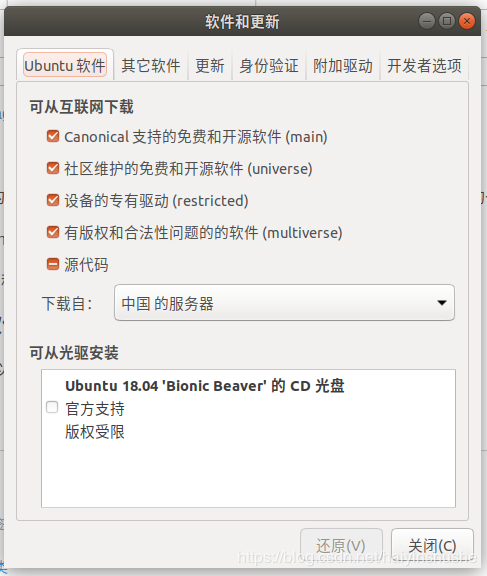
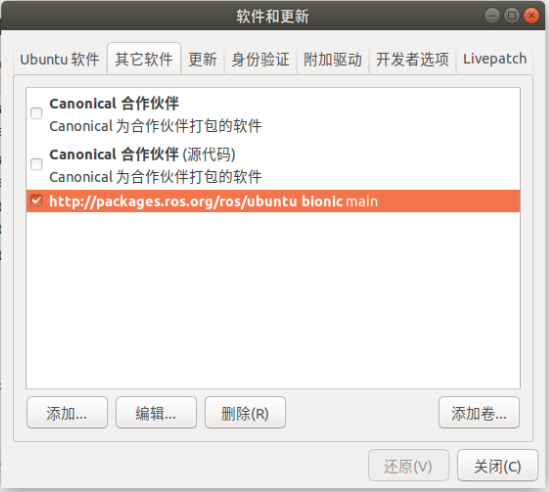
2。 选择中国的服务器,把第二项《其他软件》里的勾勾全部去掉,否则有可能在关闭时弹出“下载软件仓库信息失败 检查您的网络连接“
3。设置sources.list(设置软件源),将电脑设置为可以从http://packages.ros.org接收软件
国外的:(该教程使用的着一种,最后可以执行成功)
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
国内的,速度快:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
清华的:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
4。添加秘钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
5。确保软件更新为最新版本
sudo apt-get update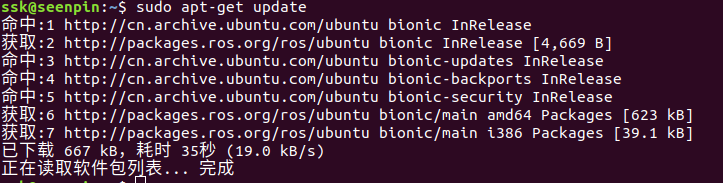
6。下载ros
sudo apt-get install ros-melodic-desktop-full
经过漫长的等待,终于安装完成,安装完成界面如下所示
7。初始化操作,需要先初始化rosdep。rosdep能够轻松地安装要编译的源代码的系统依赖关系,并且需要在ROS中运行一些核心组件。在使用 ROS 之前,需要先初始化 rosdep。rosdep 使得你可以为你想要编译的源码,以及需要运行的 ROS 核心组件,简单地安装系统依赖。
sudo rosdep init然后悲催的事情发生了,rosdep初始化失败了,如下图所示
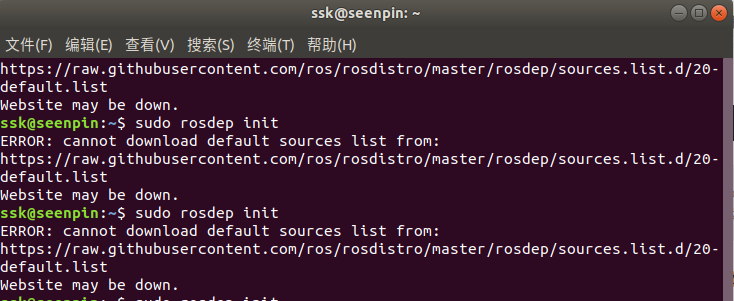
用ubuntu的火狐浏览器也无法打开给出的网址,网址如下
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list

解决方法为,执行如下指令:
sudo apt-get install python-rosdep python-wstool
安装完成之后刚才那个网址https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
用火狐浏览器也能打开了,打开之后如下
问题解决完毕,再次执行rosdep初始化操作就可以了
sudo rosdep init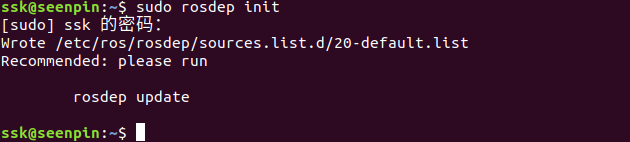
按照提示继续执行rosdep update更新操作
rosdep update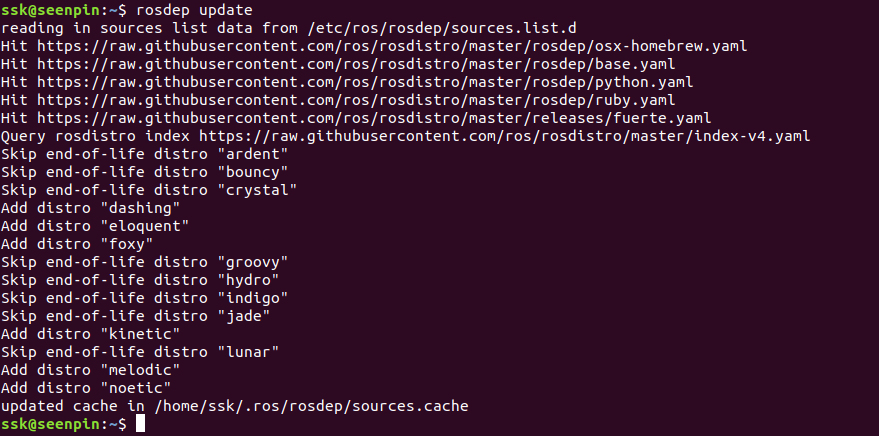
8。环境配置,添加ros环境变量。 如果在每次一个新的终端启动时,ROS 环境变量都能自动地添加进你的 bash 会话是非常方便,这可以通过如下命令来实现:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
9。安装rosinstall,rosinstall是一种常用的命令行工具
到这一步,应该已经安装好了运行核心 ROS 包的所有东西。要创建和管理你自己的 ROS workspace,还有单独发布的许多的工具。比如,rosinstall 是一个常用的命令行工具,使你可以通过一个命令为 ROS 包简单地下载许多源码树。
要安装这个工具及其它的依赖以构建 ROS 包,则运行:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential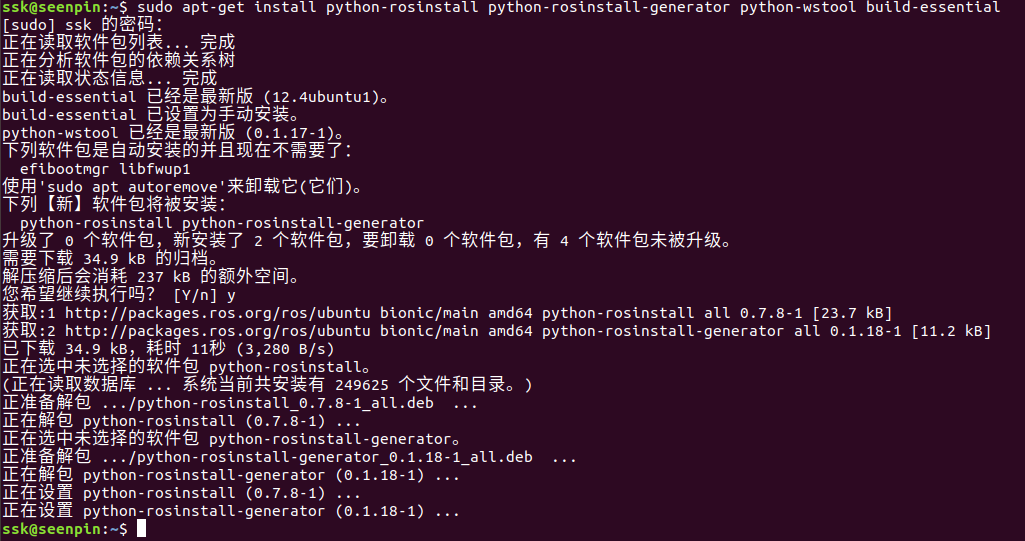
10。测试ROS是否已经安装成功
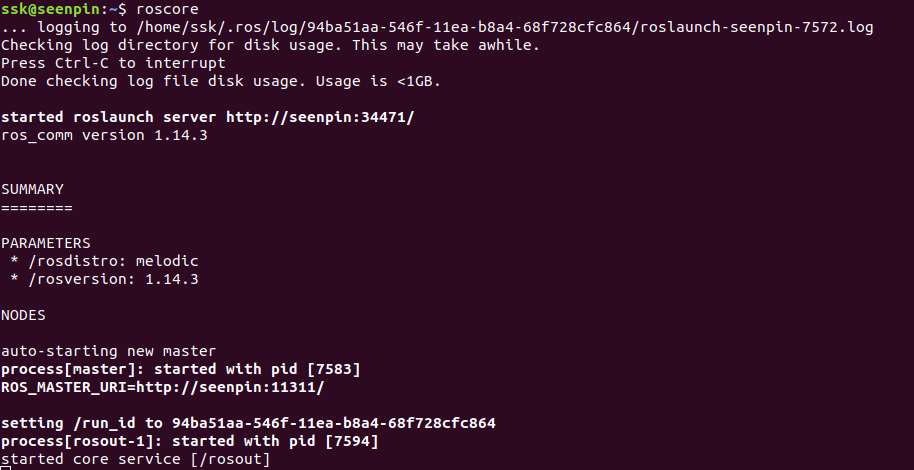
第一步:按住Alt+Ctrl+T打开一个新的终端,然后输入roscore
第二步:按住Alt+Ctrl+T打开一个新的终端,然后输入rosrun turtlesim turtlesim_node,会弹出一个小海龟
rosrun turtlesim turtlesim_node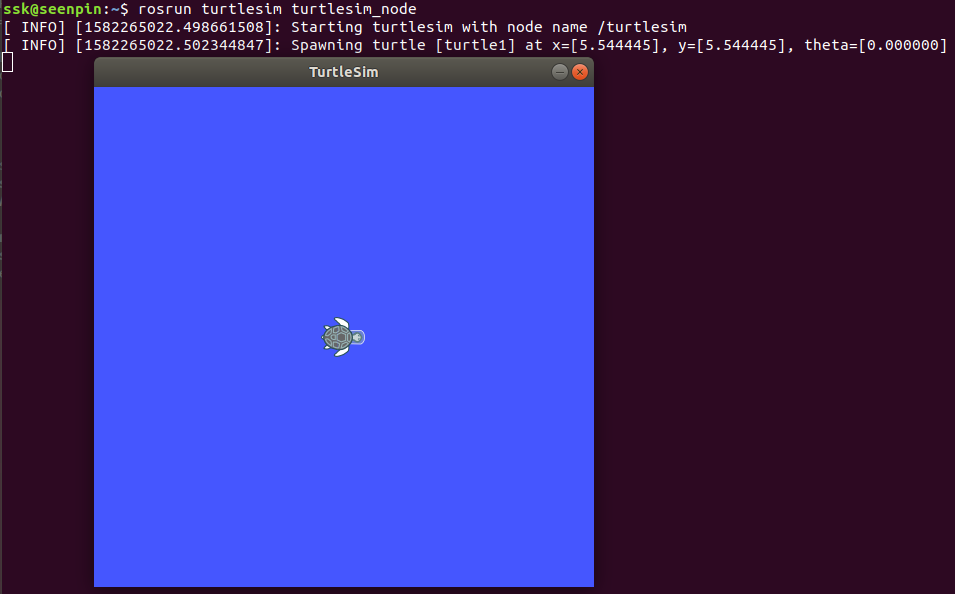
第三步:按住Alt+Ctrl+T打开一个新的终端,然后输入rosrun turtlesim turtle_teleop_key,按键盘上的上下左右箭头,控制小海龟移动
rosrun turtlesim turtle_teleop_key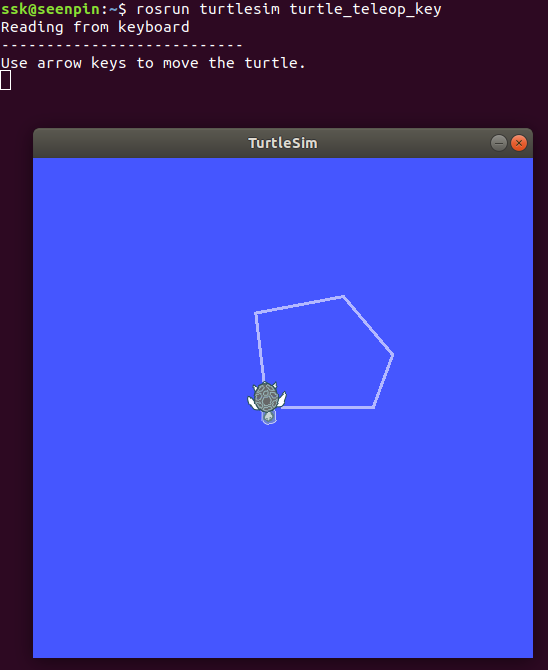
至此,ROS的安装已经基本完成,下面就可以进行ROS开发了
创建并初始化工作目录
ROS使用一个名为catkin的ROS专用构建系统。为了使用它,用户需要创建并初始化
catkin工作目录,如下所示。除非用户创建新的工作目录,否则此设置只需设置一次。
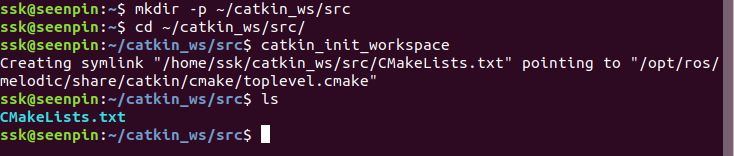
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace执行完之后会在~/下生成catkin_ws工作空间,执行完catkin_init_workspace之后会在src下生成CMakeList.txt
即使这个工作空间是空的(在’src’目录中没有任何软件包,只有一个CMakeLists.txt链接文件),你依然可以编译它:
cd ~/catkin_ws/
catkin_make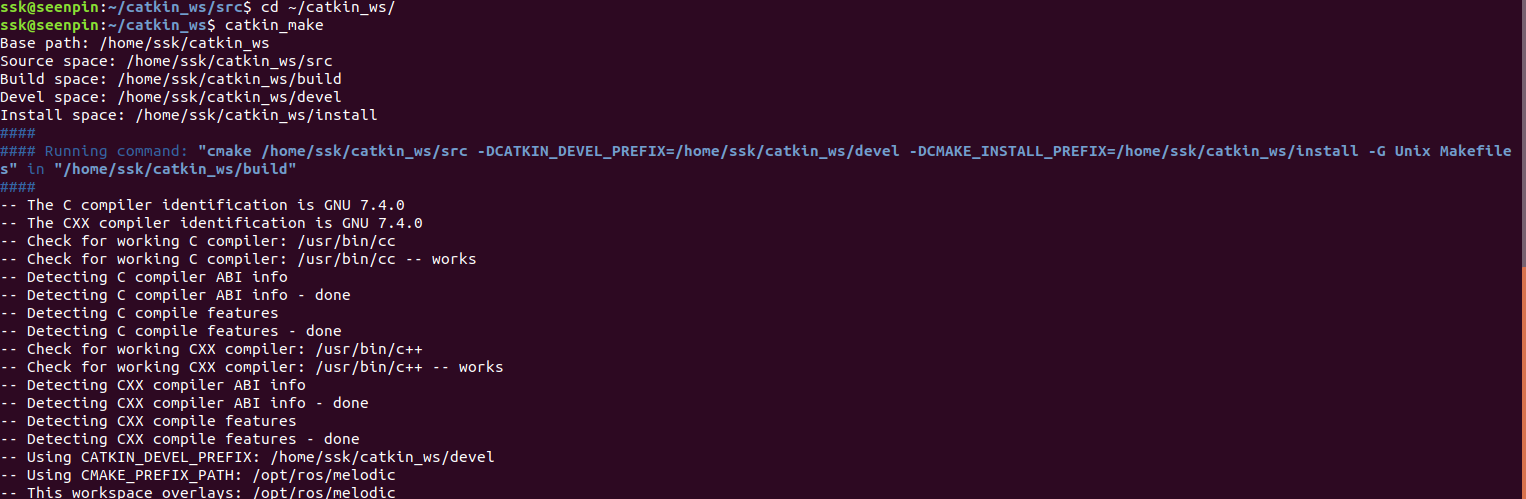
catkin_make命令在catkin 工作空间中是一个非常方便的工具。如果你查看一下当前目录应该能看到’build’和’devel’这两个文件夹。在’devel’文件夹里面你可以看到几个setup.*sh文件。接下来首先source一下新生成的setup.*sh文件:
$ source devel/setup.bash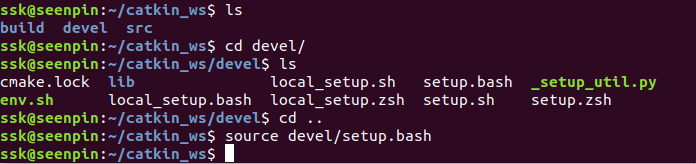
要想保证工作空间已配置正确需确保ROS_PACKAGE_PATH环境变量包含你的工作空间目录,采用以下命令查看:
echo $ROS_PACKAGE_PATH
/home/<youruser>/catkin_ws/src:/opt/ros/melodic/share:/opt/ros/melodic/stacks
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/195268.html原文链接:https://javaforall.net


