
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
1. ROS版本选择
ROS是一个用于编写机器人软件的灵活框架,它集成了大量的工具、库、协议,提供了类似操作系统所提供的功能,包括硬件抽象描述、底层驱动程序管理、公用功能的执行、程序间的消息传递、程序发行包管理,可以极大简化繁杂多样的机器人平台下的复杂任务创建与稳定行为控制。
- ROS和Ubuntu版本安装对应关系
| ROS版本 | Ubuntu版本 |
|---|---|
| indigo | 14.04 |
| kinetic | 16.04 |
| melodic | 18.04 |
- ROS的安装方法主要有两种:软件源安装和源码编译安装。软件源(Repository)为系统提供一个庞大的应用程序仓库,只要通过简单的命令即可从仓库中找到需要的软件并完成下载安装。相反,源码编译的方法相当复杂,需要手动解决繁杂的软件依赖关系,更适合那些对系统比较熟悉而且希望在未支持的平台上安装ROS的开发者。
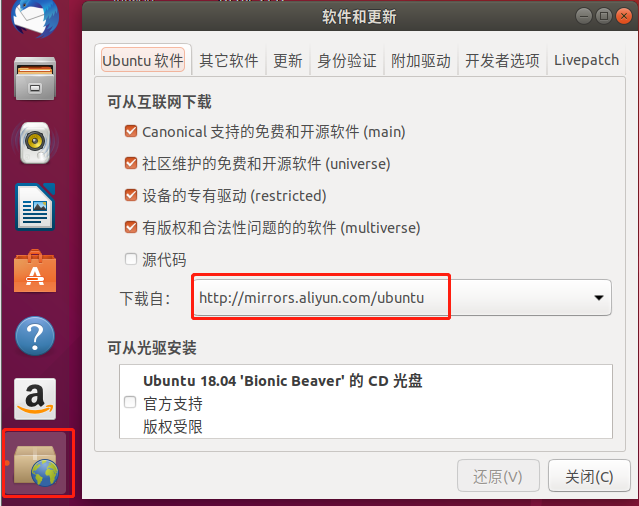
2. 配置系统软件源
点击软件和更新,查看配置如下:

3. 添加ROS软件源
source.list 是Ubuntu系统保存软件源地址的文件,位于/ect/apt 目录下,需要将ROS的软件源地址添加到该文件中,确保后续找到正确的ROS相关软件的下载地址。
打开终端,输入一下命令
- ROS官方软件源镜像
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
- 中国科学技术大学(USTC)镜像源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
- 中山大学(Sun Yat-Sen University)镜像源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirror.sysu.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
- 易科机器人实验室(ExBot Robotics Lab)镜像源
sudo sh -c '. /etc/lsb-release && echo "deb http://ros.exbot.net/rospackage/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'
4. 添加秘钥
使用如下命令添加秘钥:
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
- Q&A:
Q: GPG错误:由于没有公钥,无法验证下列签名 ***********(一串数字)
A:sudo apt-key adv –keyserver keyserver.ubuntu.com –recv-keys *********** (一串数字)
5. 安装ROS
- 更新软件源
sudo apt-get update
- 桌面完整版安装(Desktop-full)、
sudo apt-get install ros-melodic-desktop-full
- 桌面版安装
sudo apt-get install ros-melodic-desktop
- 基础版安装
sudo apt-get install ros-melodic-ros-base
- 独立功能包安装
sudo apt-get install ros-melodic-PACKAGE
6. 初始化rosdep
rosdep 是ROS中自带的工具,主要功能是为某些功能安装包安装系统依赖,同时也是某些ROS核心功能包必须用到的工具。
sudo rosdep init
rosdep update
建议: 此处更新失败的较多,较好的解决办法是:手机开热点,电脑连接手机热点进行更新。
7. 设置环境变量
现在ROS已经成功安装到计算机了,默认在/opt路径下。后续由于会频繁使用终端输入ROS命令,所以在使用之前还需要对环境变量进行设置。
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
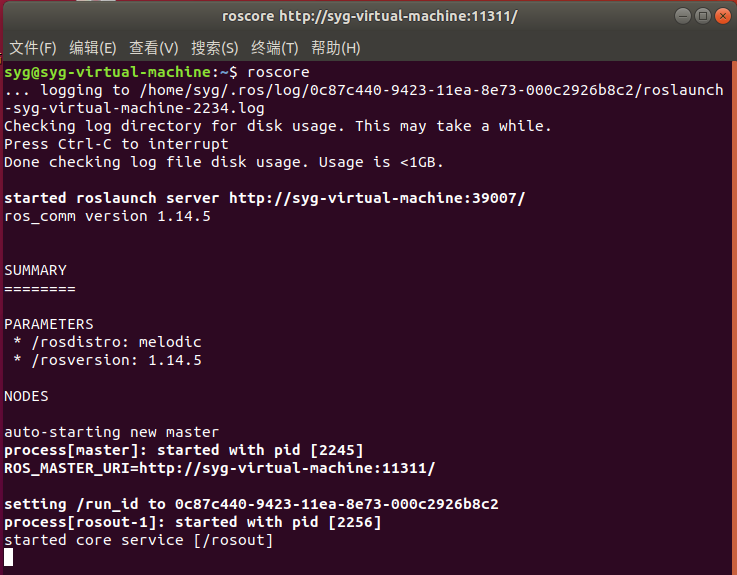
8. 完成安装
打开终端,输入roscore命令,会看到如下画面,代表安装成功。
rosinstall 也是ROS中一个常用工具,可以下载和安装ROS中的功能包程序。
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
Q&A
Q: “E: 无法获得锁 /var/lib/dpkg/lock – open (11: 资源暂时不可用)
E: 无法锁定管理目录(/var/lib/dpkg/),是否有其他进程正占用它?
A: 该问题一般是由于apt-get install 进行到一半强制中止所致。
1. sudo rm /var/cache/apt/archive/lock
2. sudo rm /var/lib/dpkg/lock
3. 重启系统
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/195326.html原文链接:https://javaforall.net


