
根据偏差的比例(P)、积分(I)、微分(D)进行控制(简称PID控制),是
控制系统中应用最为广泛的一种控制规律。
PID调节器之所以经久不衰,主要有以下优点:
(1)技术成熟,通用性强
(2)原理简单,易被人们熟悉和掌握
(3)控制效果较好
(一)、PID的形式:
注:输入偏差=读出的被控制对象的值-设定值。比如说我要把温度控制在26度,但是现在我从温度传感器上读出温度为28度。则这个26度就是”设定值“,28度就是“读出的被控制对象的值”。
PID控制律的表达式:

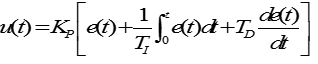
对应的模拟PID调节器的传递函数为
(二)PID参数对控制性能的影响
1.随着比例系数Kp的增加,超调量增大,系统响应速度加快,
总结:
(三)数字PID控制器的基本算法(计算机编程实现,大家最关心的部分)
2.增量型控制算法


数字PID控制算法流程

下文将讲解PID控制算法集中改进。
1.积分项改进
2.微分项改进
3.带死区的PID控制算法
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/200120.html原文链接:https://javaforall.net


