
1. 算法
上一篇介绍了显式欧拉法、隐式欧拉法、两步欧拉法和改进欧拉法求解常微分方程初值问题;其中显式欧拉法和隐式欧拉法是一阶算法精度,截断误差为 O ( h 2 ) O\left( {
{h^2}} \right) O(h2);两步欧拉法和改进欧拉法是二阶算法精度,截断误差为 O ( h 3 ) O\left( {
{h^3}} \right) O(h3);欧拉法的精度有限、需要求解步长 h h h很小。本篇介绍求解精度更高的四阶龙格库塔法(Runge-Kutta),其截断误差为 O ( h 5 ) O\left( {
{h^5}} \right) O(h5)。
对于一阶微分方程初值问题:
{ y ˙ = f ( t , y ) y ( t 0 ) = y 0 \left\{ \begin{array}{l} {\bf{\dot y}} = f\left( {t,{\bf{y}}} \right) \\ {\bf{y}}\left( {
{t_0}} \right) = {
{\bf{y}}_0} \\ \end{array} \right. {
y˙=f(t,y)y(t0)=y0
式中, t 0 {t_0} t0为初始时间(已知常数), y 0 {
{\bf{y}}_0} y0为初始状态(已知向量), f ( t , y ) f\left( {t,{\bf{y}}} \right) f(t,y)为关于时间 t {t} t和状态 y {
{\bf{y}}} y的函数(已知函数)。
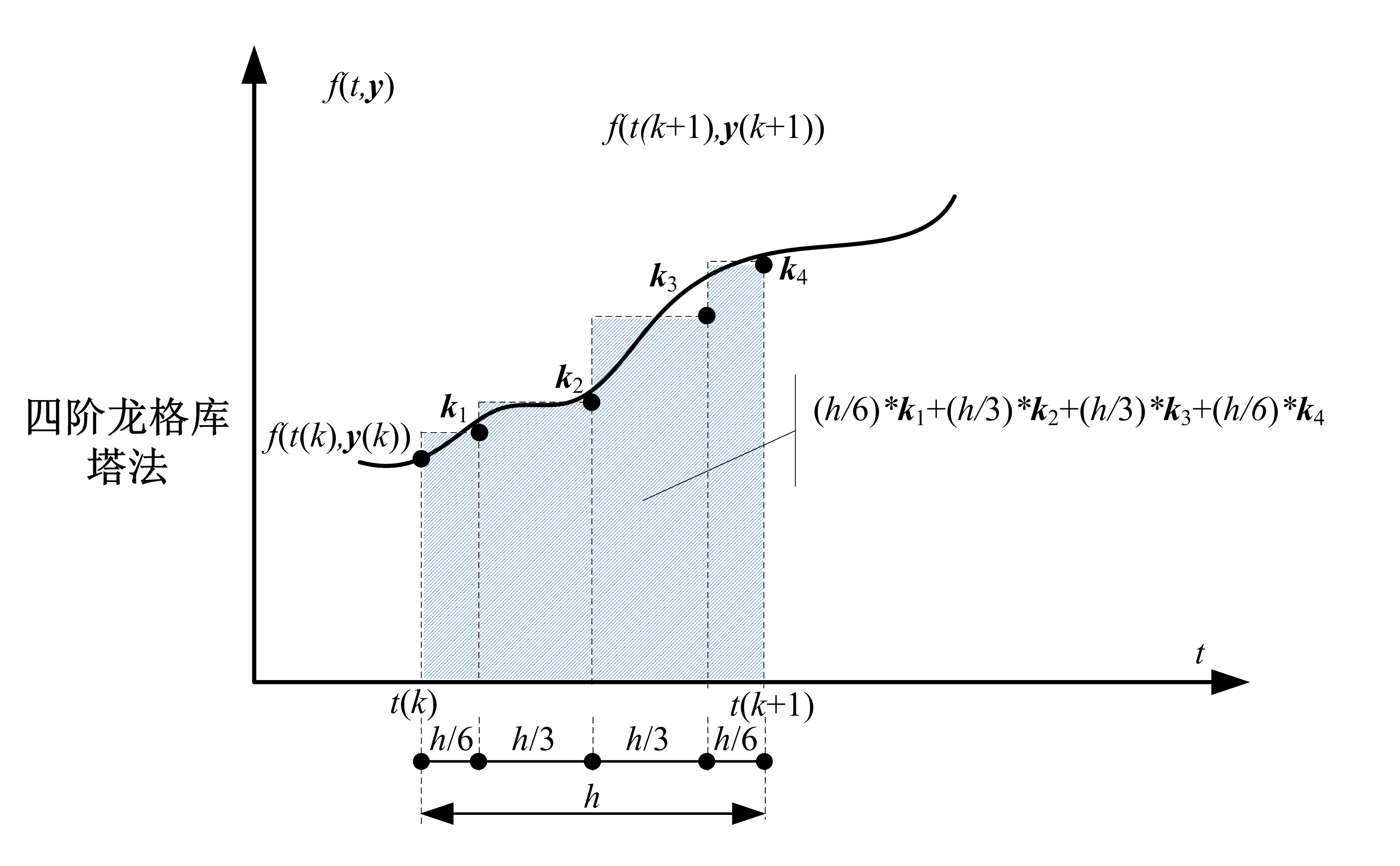
四阶龙格库塔法(Runge-Kutta)求解算法为:
k 1 = f ( t ( k ) , y ( k ) ) {
{k}_{1}}=f\left( t\left( k \right),\mathbf{y}\left( k \right) \right) k1=f(t(k),y(k))
k 2 = f ( t ( k ) + h 2 , y ( k ) + h 2 k 1 ) {
{k}_{2}}=f\left( t\left( k \right)+\frac{h}{2},\mathbf{y}\left( k \right)+\frac{h}{2}{
{k}_{1}} \right) k2=f(t(k)+2h,y(k)+2hk1)
k 3 = f ( t ( k ) + h 2 , y ( k ) + h 2 k 2 ) {
{k}_{3}}=f\left( t\left( k \right)+\frac{h}{2},\mathbf{y}\left( k \right)+\frac{h}{2}{
{k}_{2}} \right) k3=f(t(k)+2h,y(k)+2hk2)
k 4 = f ( t ( k ) + h , y ( k ) + h k 3 ) {
{k}_{4}}=f\left( t\left( k \right)+h,\mathbf{y}\left( k \right)+h{
{k}_{3}} \right) k4=f(t(k)+h,y(k)+hk3)
y ( k + 1 ) = y ( k ) + h 6 ( k 1 + 2 k 2 + 2 k 3 + k 4 ) \mathbf{y}\left( k+1 \right)=\mathbf{y}\left( k \right)+\frac{h}{6}\left( {
{k}_{1}}+2{
{k}_{2}}+2{
{k}_{3}}+{
{k}_{4}} \right) y(k+1)=y(k)+6h(k1+2k2+2k3+k4)
y ( 0 ) = y 0 \mathbf{y}\left( 0 \right)={
{\mathbf{y}}_{0}} y(0)=y0
上式是关于 y ( k ) {\bf{y}}\left( k \right) y(k)向 y ( k + 1 ) {\bf{y}}\left( k+1 \right) y(k+1)的递推形式,可以根据初始条件按照递推关系依次求出 y ( 1 ) , y ( 2 ) , y ( 3 ) , y ( 4 ) ⋯ , y ( N ) ⋯ {\bf{y}}\left( 1 \right),{\bf{y}}\left( 2 \right),{\bf{y}}\left( 3 \right),{\bf{y}}\left( 4 \right) \cdots ,{\bf{y}}\left( N \right) \cdots y(1),y(2),y(3),y(4)⋯,y(N)⋯,此离散序列即为微分方程的数值解。
微分方程的数值解法,本质是使用数值积分来实现 y ˙ {\bf{\dot y}} y˙向 y {\bf{y}} y的转换。四阶龙格库塔法通过对微分的四步分段逼近,在一个求解步长内能够逼近复杂的曲线,因此能够取得较高的计算精度,其截断误差为 O ( h 5 ) O\left( {
{h^5}} \right) O(h5)。

2. 程序
作者使用Matlab开发了四阶龙格库塔法求解常微分方程的程序,能够方便快捷的求解一阶常微分方程的初值问题。
function [T,X,dX] = ODE_RK4( Hfun,t,h,x0 ) % [T,X] = ODE_RK4( Hfun,t,h,x0 ) 4阶龙格-库塔法求解常微分方程 % Hfun为描述状态导数的函数句柄,格式为 dX = Hfun( t,X ) % 必须保证返回dX的格式为行向量 % t为时间节点,可为标量,时间范围为 T = 0:h:t % 长2向量 ,时间范围为 T = t(1):h:t(2) % 向量 ,时间范围为 T = t % h为时间步长,在t的前两种情况下,必须给出h具体值 % 直接给出时间节点t时,h可用[]或任意值占位 % x0为状态量初始值 % 算法: % K1 = Hfun( t(k-1),X(k-1) ) = dX(k-1) % K2 = Hfun( t(k-1)+h/2,X(k-1)+h*K1/2 ) % K3 = Hfun( t(k-1)+h/2,X(k-1)+h*K2/2 ) % K4 = Hfun( t(k-1)+h ,X(k-1)+h*K3 ) % X(k) = X(k-1) + (h/6) * (K1 + 2*K2 + 2*K3 +K4) % By ZFS@wust 2021 % 获取更多Matlab/Simulink原创资料和程序,清关注微信公众号:Matlab Fans 下面结合实例进行演示和分析。
3. 案例
求解一阶常微分方程(式中向量 x {\bf{x}} x等价于前文中的向量 y {\bf{y}} y):
x ˙ = f ( t , x ) = [ x ( 2 ) ∗ x ( 3 ) − x ( 1 ) ∗ x ( 3 ) − 0.51 ∗ x ( 1 ) ∗ x ( 2 ) ] \mathbf{\dot{x}}=f\left( t,\mathbf{x} \right)=\left[ \begin{matrix} \mathbf{x}(2)*\mathbf{x}(3) \\ -\mathbf{x}(1)*\mathbf{x}(3) \\ -0.51*\mathbf{x}(1)*\mathbf{x}(2) \\ \end{matrix} \right] x˙=f(t,x)=⎣⎡x(2)∗x(3)−x(1)∗x(3)−0.51∗x(1)∗x(2)⎦⎤
x ( 0 ) = [ 0 1 1 ] \mathbf{x}\left( 0 \right)=\left[ \begin{matrix} 0 \\ 1 \\ 1 \\ \end{matrix} \right] x(0)=⎣⎡011⎦⎤
% 四阶龙格库塔算法(Runge-Kutta)测试程序 % By ZFS@wust 2021 % 获取更多Matlab/Simulink原创资料和程序,清关注微信公众号:Matlab Fans clear clc close all %% 仿真步长 h=0.6 时 Hfun = @(t,x) [ x(2)*x(3); -x(1)*x(3); -0.51*x(1)*x(2)]; % 一阶微分方程导数表达式 % 参数 t = [0 12]; % 时间范围 h = 0.6; % 时间步长 x0 = [0 1 1]; % 初始状态 % 改进欧拉法求解 [T1,X1] = ODE_ImprovedEuler( Hfun,t,h,x0 ); % 改进欧拉法求解 [T2,X2] = ODE_RK4( Hfun,t,h,x0 ); % Matlab自带ode45求解 [T3,X3] = ode45( Hfun,t(1):h:t(2),x0 ); % 绘图对比 figure subplot(311) plot(T1,X1(:,1),T2,X2(:,1),T3,X3(:,1)) xlabel('Time(s)') ylabel('x_1') legend('改进欧拉法','四阶龙格库塔法','ode45') subplot(312) plot(T1,X1(:,1),T2,X2(:,1),T3,X3(:,1)) xlabel('Time(s)') ylabel('x_2') legend('改进欧拉法','四阶龙格库塔法','ode45') subplot(313) plot(T1,X1(:,1),T2,X2(:,1),T3,X3(:,1)) xlabel('Time(s)') ylabel('x_3') legend('改进欧拉法','四阶龙格库塔法','ode45') %% 仿真步长 h=0.9 时 % 参数 h = 0.9; % 时间步长 % 改进欧拉法求解 [T1,X1] = ODE_ImprovedEuler( Hfun,t,h,x0 ); % 改进欧拉法求解 [T2,X2] = ODE_RK4( Hfun,t,h,x0 ); % Matlab自带ode45求解 [T3,X3] = ode45( Hfun,t(1):h:t(2),x0 ); % 绘图对比 figure subplot(311) plot(T1,X1(:,1),T2,X2(:,1),T3,X3(:,1)) xlabel('Time(s)') ylabel('x_1') legend('改进欧拉法','四阶龙格库塔法','ode45') subplot(312) plot(T1,X1(:,1),T2,X2(:,1),T3,X3(:,1)) xlabel('Time(s)') ylabel('x_2') legend('改进欧拉法','四阶龙格库塔法','ode45') subplot(313) plot(T1,X1(:,1),T2,X2(:,1),T3,X3(:,1)) xlabel('Time(s)') ylabel('x_3') legend('改进欧拉法','四阶龙格库塔法','ode45') 不同时间步长 h h h时的数值计算结果:
- 步长 h = 0.6 s h=0.6s h=0.6s
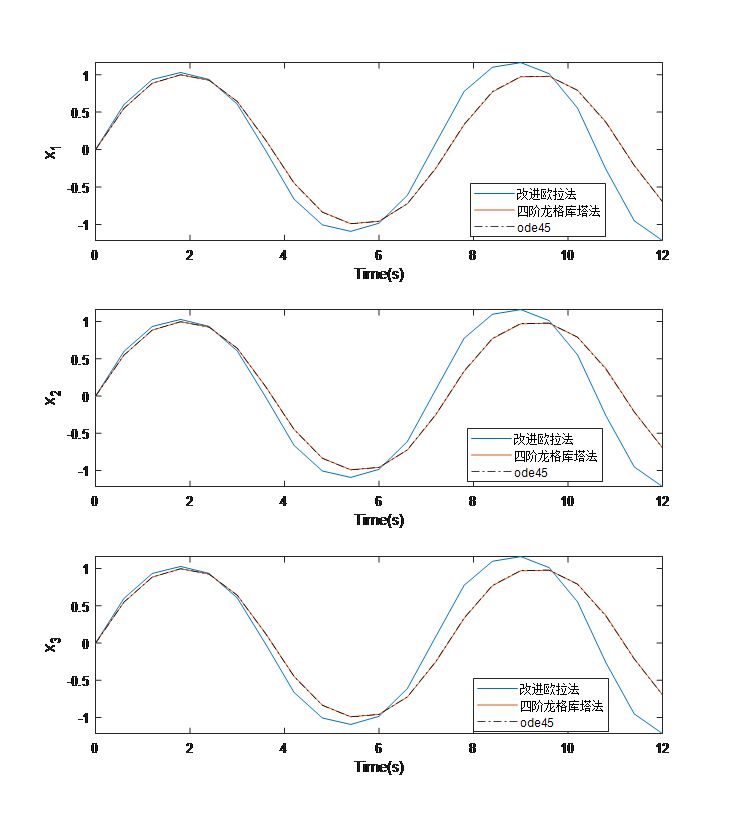
- 步长 h = 0.9 s h=0.9s h=0.9s

4. 联系作者
有Matlab/Simulink方面的技术问题,欢迎发送邮件至@.com讨论。
更多Matlab/Simulink原创资料,欢迎关注微信公众号:Matlab Fans
源程序下载:
1. csdn资源: 四阶龙格库塔法(Runge-Kutta)求解常微分方程的Matlab程序及案例
2. 扫码关注微信公众号Matlab Fans,回复BK09获取百度网盘下载链接。

发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/204250.html原文链接:https://javaforall.net


