
0.引言
有的地方也称之为归约算法.
/* asum: sum of all entries of a vector. * This code only calculates one block to show the usage of shared memory and synchronization */ #include
1.reduction_1
/* sum all entries in x and asign to y */ __global__ void reduction_1(const FLOAT *x, FLOAT *y) {
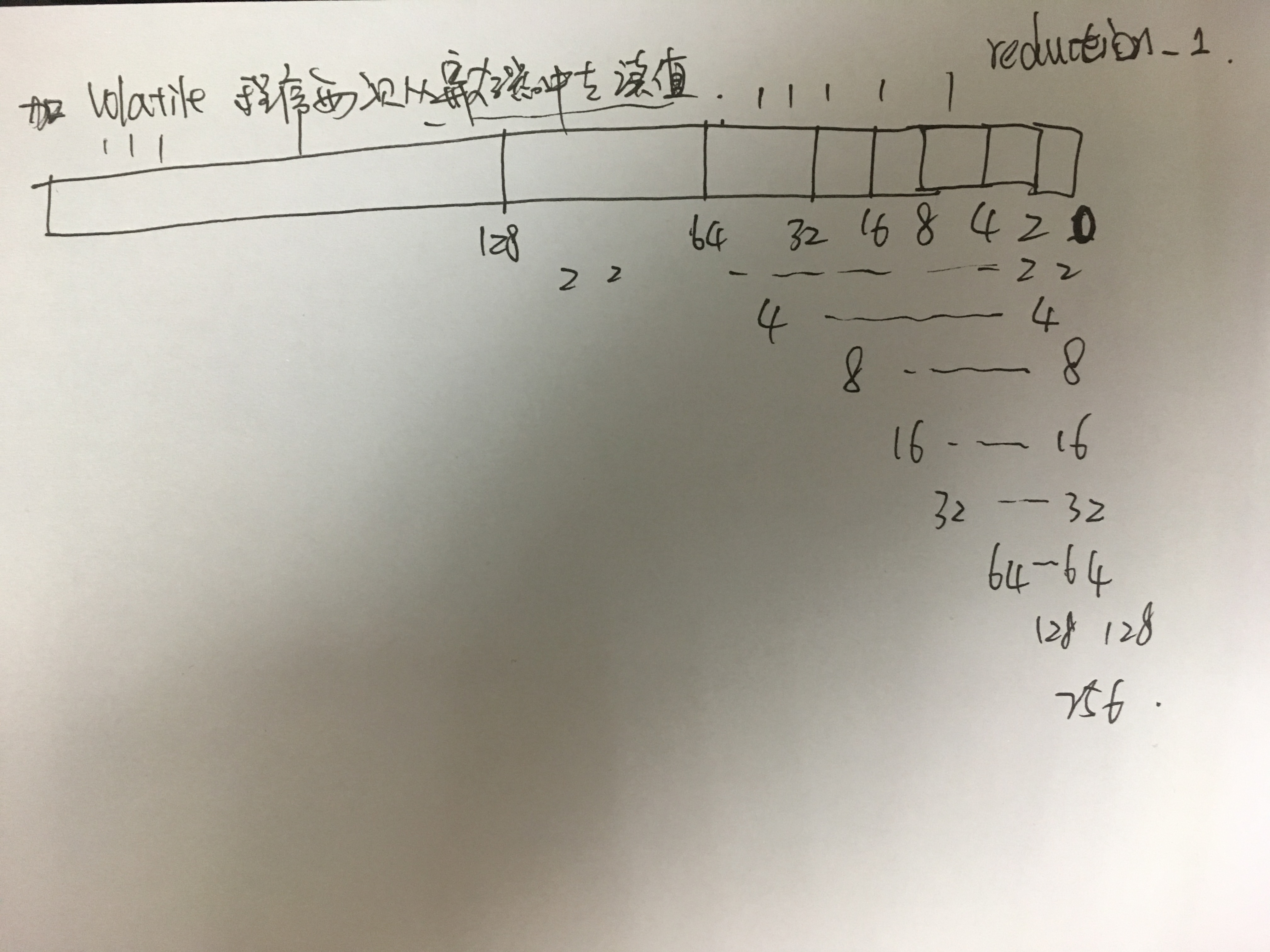
__shared__ FLOAT sdata[256]; int tid = threadIdx.x; /* load data to shared mem 共享内存是块内线程可见的,所以就有竞争问题的存在,也可以通过共享内存进行通信. 为了避免内存竞争,可以使用同步语句:void __syncthreads();语句相当于在线程 块执行时各个线程的一个障碍点,当块内所有线程都执行到本障碍点的时候才能进行下 一步的计算;但是,__syncthreads(); 频繁使用会影响内核执行效率。*/ sdata[tid] = x[tid];//这个x是 FLOAT *x; __syncthreads(); /* reduction using shared mem 把for循环展开*/ if (tid < 128) sdata[tid] += sdata[tid + 128]; __syncthreads(); if (tid < 64) sdata[tid] += sdata[tid + 64]; __syncthreads(); if (tid < 32) sdata[tid] += sdata[tid + 32]; __syncthreads(); if (tid < 16) sdata[tid] += sdata[tid + 16]; __syncthreads(); if (tid < 8) sdata[tid] += sdata[tid + 8]; __syncthreads(); if (tid < 4) sdata[tid] += sdata[tid + 4]; __syncthreads(); if (tid < 2) sdata[tid] += sdata[tid + 2]; __syncthreads(); if (tid == 0) {
*y = sdata[0] + sdata[1]; } } 使用__share__共享内存以及__syncthreads()函数进行断句(断句为自己理解命名的).线程理解:


2.reduction_2
__global__ void reduction_2(const FLOAT *x, FLOAT *y) {
__shared__ volatile FLOAT sdata[256];//加volatile关键字,避免编译器自己进行优化. int tid = threadIdx.x; sdata[tid] = x[tid]; __syncthreads(); if(tid < 128) sdata[tid] += sdata[tid + 128]; __syncthreads(); if(tid < 64) sdata[tid] += sdata[tid + 64]; __syncthreads(); if(tid < 32) {
sdata[tid] += sdata[tid + 32]; sdata[tid] += sdata[tid + 16]; sdata[tid] += sdata[tid + 8]; sdata[tid] += sdata[tid + 4]; sdata[tid] += sdata[tid + 2]; sdata[tid] += sdata[tid + 1]; } if(tid == 0) y[0] =sdata[0]; } 这个算法注意点在于:
- 1.共享内存;
- 2.warp机制;
- 3.volatile关键字;
- volatile关键字理解参考1.
- volatile关键字理解参考2
对于第一点,第二节中已经介绍了;对于第二点,GPU中最小的操作为一个warp,一个warp32个线程,这也是程序从if(tid < 32)开始并列写的原因.对于第三点,我尝试用自己的语音讲出来,但是发现还是官方的说法最为贴切中肯,具体的可以参考链接中的文章:
- volatile关键字可以实现线程间的可见性,之所以可以实现这一点,原因在于JVM会保证被volatile修饰的变量,在线程栈中被线程使用时都会主动从共享内存(堆内存/主内存)中以实时的方式同步一次;另一方面,如果线程在工作内存中修改了volatile修饰的变量,也会被JVM要求立马刷新到共享内存中去。因此,即便某个线程修改了该变量,其他线程也可以立马感知到变化从而实现可见性.
大意就是被volatile修饰的变量是实时更新的(可以相反于中断理解),不会被编译器优化误解算法思想.

3.reduction_3
//__device__ 只能在GPU上被调用 __device__ void warpReduce(volatile FLOAT *sdata, int tid) {
sdata[tid] += sdata[tid + 32]; sdata[tid] += sdata[tid + 16]; sdata[tid] += sdata[tid + 8]; sdata[tid] += sdata[tid + 4]; sdata[tid] += sdata[tid + 2]; sdata[tid] += sdata[tid + 1]; } __global__ void reduction_3(const FLOAT *x, FLOAT *y) {
__shared__ FLOAT sdata[256]; int tid = threadIdx.x; /* load data to shared mem */ sdata[tid] = x[tid]; __syncthreads(); /* reduction using shared mem */ if (tid < 128) sdata[tid] += sdata[tid + 128]; __syncthreads(); if (tid < 64) sdata[tid] += sdata[tid + 64]; __syncthreads(); if (tid < 32) warpReduce(sdata, tid); if (tid == 0) y[0] = sdata[0]; } reduction_3思想与reduction_2一样,只是为了理解volatile的修饰作用.
4.result

去除reduction_2中的volatile关键字结果:

28,结果肯定是小于256的.
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/205126.html原文链接:https://javaforall.net


