
1. FLP impossibility背景
FLP Impossibility(FLP不可能性)是分布式领域中一个非常著名的结果,该结果在专业领域被称为“定理”,其地位之高可见一斑。该定理的论文是由Fischer, Lynch and Patterson三位作者于1985年发表,之后该论文毫无疑问得获得了Dijkstra奖。
顺便要提一句的是,Lynch是一位非常著名的分布式领域的女性科学家,研究遍布分布式的方方面面,对分布式领域有着极其卓越的贡献,其著有<
>一书,书中有非常严谨而简洁的逻辑讨论了许许多多的分布式算法。
FLP给出了一个令人吃惊的结论:在异步通信场景,即使只有一个进程失败,也没有任何算法能保证非失败进程达到一致性!
因为同步通信中的一致性被证明是可以达到的,因此在之前一直有人尝试各种算法解决以异步环境的一致性问题,有个FLP的结果,这样的尝试终于有了答案。
FLP证明最难理解的是没有一个直观的sample,所有提到FLP的资料中也基本都回避了sample的要求。究其原因,sample难以设计,除非你先设计几种一致性算法,并用FLP说明这些算法都是错误的。
2. 系统模型
任何分布式算法或定理,都尤其对系统场景的假设,这称为系统模型。FLP基于下面几点假设:
- 异步通信
与同步通信的最大区别是没有时钟、不能时间同步、不能使用超时、不能探测失败、消息可任意延迟、消息可乱序 - 通信健壮
只要进程非失败,消息虽会被无限延迟,但最终会被送达;并且消息仅会被送达一次(无重复) - fail-stop模型
进程失败如同宕机,不再处理任何消息。相对Byzantine模型,不会产生错误消息 - 失败进程数量
最多一个进程失败
- Termination(终止性)
非失败进程最终可以做出选择 - Agreement(一致性)
所有的进程必须做出相同的决议 - Validity(合法性)
进程的决议值,必须是其他进程提交的请求值
3. 一个Sample
4. Paxos为什么可以?
其实仔细回忆Paxos论文会发现,Paxos中存在活锁,理论上的活锁会导致Paxos算法无法满足Termination属性,也就不算一个正确的一致性算法。Lamport在自己的论文中也提到“FLP结果表明,不存在完全满足一致性的异步算法…”,因此他建议通过Leader来代替Paxos中的Proposer,而Leader则通过随机或其他方式来选定(Paxos中假如随机过程会极大降低FLP发生的概率)。也就是说Paxos算法其实也不算理论上完全正确的,只是在工程实现中避免了一些理论上存在的问题。但这丝毫不影响Paxos的伟大性!
5.定理证明
5.1 一些定义
- 消息队列:
假定存在一个全局的消息队列,进程可以发送消息,也可以在其上接收消息。
send/receive:send(p,m)是指给进程p发送消息m,只是放入队列,称”发送“,如果消息被p接收,成送达(delivery);receive(p):接收发送给p的消息,若没有则返回空
消息队列实际上是模拟了异步通信,即消息会被延迟、乱序 - Configuration:前面已经提到,所有进程的状态集合,进程的状态包括初始值、决议值、消息队列的内容
初始Configuration:各个进程初始值是随机的、消息队列为空、决议为空的开始状态 - 事件e=(p,m)
事件代表给某个进程发送消息,并且消息已经送达。正是因为执行了某个事件,导致Configuration变化为另一个Configuration - 事件序列run
一连串顺序执行的事件序列称为一个run - 可达Configuration
如果某个Configuration A执行了一个run得到另一个Configuration B,则称B从A可达
5.2 引理1(连通性)
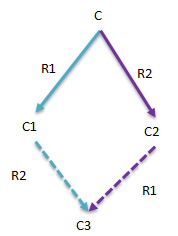
【把所有的进程P分成两个不相交的集合P1,P2,有两个run R1,R2,如果先给P1应用R1,再给P2应用R2与先给P2应用R2,再给P1应用R1,对P的Configuration C来说得到的结果是一致的(结果显而易见,不再罗列证明)】

5.3 引理2(初始Configuration不确定性)
5.4 引理3(不可终止性)
5.4.1 证明的正规化
5.4.2 证明D中既包含决议为”提交“的Configuration,也包含决议为”回滚“的Configuration。也即证明D中的Configuration不是单值决议。

5.4.3 若D是”确定“的,则导出一个矛盾
i=e(C
i),i=0,1,是i-valent的。假设C
1=e
‘(C
0),e
‘=(p
‘,m
‘):
‘,则D
1=e
‘(D
0),根据连通性会导出一个矛盾(从D
0会到D
1,这显然是不可能的):

‘,先看下图:

‘,e, 则会到达E1;如果对A应用e,则会到达E0。也就是说A是”不确定“的。这与C0是确定的Configuration矛盾,这导致最初的假设D是”确定的”错误,因此D是“不确定”的。
6. 总结
7. 参考资料
- Impossibility of Distributed Consensus with One Faulty Process
- http://the-paper-trail.org/blog/a-brief-tour-of-flp-impossibility/comment-page-1/#comment-
- Lynch的大作:<
>
- FLP_and_Paxos.pdf(Ken Birman)
- Ken Birman教书的网站:http://www.cs.cornell.edu/ken/
Origin
在处理和分析数据时,最理想的环境是这样的:
一台有无限存储和计算能力的“超级计算机”,可以提供无穷大的存储容量,并且可以将计算时间降低至无穷小。

《银河系漫游指南》中全宇宙全时空第二强的计算机“深思”,花费750万年时间,计算出了“宇宙、生命及万物 ”终极问题的答案:42
这样一台“超级计算机”在现实世界中并不存在。计算机的存储和计算能力始终要受到客观物理规律的限制。在可预见的将来,单位存储单元上无法存储超量的数据;而在运行计算任务时,由于芯片计算能力是有限的,当计算需求超过瞬时计算能力时,往往会发生排队现象。为了解决大量数据的存储和计算能力不足的问题,我们有两种选择:
扩展性 :增加机器不改变或极少改变系统行为,并能获得近似线性的性能提升;
性能 :指分布式系统进行服务时的延时和吞吐率是满足用户需要的;
可用性 :分布式系统的核心需求,表示分布式系统是否处于整体可服务并且一直可服务的状态;
容错性 :系统发生错误时,系统有对错误进行规避和恢复的能力。
保持一致 :系统中相关数据间的逻辑关系应当是正确和完整的。极端情况下,从系统中任意部分读取而获得的数据应当都为最近写入的数据;
处理失效 :分布式系统可能出现的失效状况有三类:节点失效、网络分区失效、拜占庭失效。极端情况下,系统的执行和操作不会受到任何系统内部失效的影响;
时钟同步 :分布式系统有两种模型:同步系统和异步系统。同步系统会确保所有执行过程的步调一致,且各执行过程有精确的时钟。即任意处理过程能够得到精确的执行流程的偏序关系,也就意味着每个处理过程和通信都在有限的时间内进行。异步系统则相反,没有任何时序性保证。即各处理过程是完全以自己的节拍在运行,不存在有效的同步时钟,也意味着过程间的通信延时可能会趋于无穷大。
一致(Agreement) :每个正确的执行过程应该在相同的值上达成一致;
完整(Integrity) :每个正确的执行过程最多只能决定一个值。如果它决定了某个值的话,这个值一定是被某个执行过程提出的;
终止(Termination) :所有的执行过程最终会做出一个决定;
正确(Validity) :如果所有正确的执行过程提出了相同的值V,那么所有正确的执行过程都会决定值V。
FLP不可能性
在假设网络可靠、计算节点只会因崩溃而失效的最小化异步模型系统中,仍然不存在一个可以解决一致性问题的确定性算法。
CAP定理
分布式计算系统不可能同时确保一致性、可用性和分区容忍性。
一致性(Consistency) :所有节点在同一时刻能够看到同样的数据,也即“强一致性”;
可用性(Availability) :确保每个请求都可以收到确定其是否成功的响应;
分区容忍性(Partition tolerance) :因为网络故障导致的系统分区不影响系统正常运行。
C+A :以2阶段提交(2 phase commit)为代表的严格选举协议。当通信中断时算法不具有终止性(即不具备分区容忍性);
C+P :以Paxos、Raft为代表的多数派选举算法。当不可用的执行过程超过半数时,算法无法得到正确结果(即会出现不可用的情况);
A+P :以Gossip协议为代表的冲突解决协议。当网络分区存在和执行过程正确时,只能等待分区消失才保持一致性(即不具备强一致性)
参考资料
一致性问题:https://en.wikipedia.org/wiki/Consensus_(computer_science)
FLP不可能性:http://cs-www.cs.yale.edu/homes/arvind/cs425/doc/fischer.pdf
CAP定理:https://en.wikipedia.org/wiki/CAP_theorem
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/208392.html原文链接:https://javaforall.net

![SP论坛天堂鸟技术学院[通俗易懂]](https://javaforall.net/wp-content/uploads/2020/11/2020110817443450-480x300.jpg)
