
最近在做一个项目,涉及到工业相机,需要对其进行二次开发。相机方面选择了海康威视,网上关于海康威视工业相机SDK的开发资料很少,官方文档里面虽然写的是支持C++开发的,但其实是C。自己也摸索了一段时间,请教大佬,终于有了些收获,记录下来,方面以后查阅。
目录
1.说明
1.1软硬件相关配置
1.1.1硬件选择
1.1.2软件选择
VS2019+Opencv4.4+QT5.13.2+海康威视SDKMVS_SDK_V3_2_0
①VS工程配置Opencv(参考如下博客)
Opencv4.4文件:
链接:https://pan.baidu.com/s/1EpOfbkrzkpLyX14w7vINUw
提取码:7qxl
【opencv4.3.0教程】01之opencv介绍与配置
https://blog.csdn.net/shuiyixin/article/details/
1.2关于安防相机与工业相机
2.相关资料与官方文档
2.1官方文档
2.2网上相关的资料
3.海康威视工业相机SDK官方例程的修改
3.1环境配置
3.2官方例程
ConnectSpecCamera.cpp


功能:通过ip地址连接相机
该示例程序说明了如何通过ip地址连接网口相机。通过输入需要连接的相机ip(Camera Ip)和相机对应的网卡ip(Export Ip)来连接相机,输入的格式为xx.xx.xx.xx。
修改的地方:
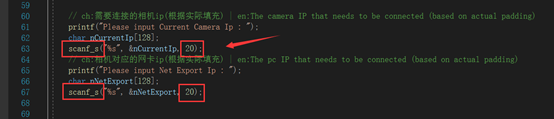
一开始官方例程中的scanf会报错说这个函数不安全,这不是错误但在高版本VS下会认为这是个错误,解决方法有二:在项目设置中增加一行预处理定义可以自行百度。或者选择修改为scanf_s。
我选择改成scanf_s,且后面还要加个参数20,表示输入的最大字符数大小,ip地址加上三个点是15个字符,这里填个20。
参考:https://baike.baidu.com/item/scanf_s/443572?fr=aladdin
修改后的源码如下:
#include
GrabImage_Display.cpp

功能:图像采集并显示
该示例程序演示如何取图并显示取到的每一帧图像。
修改的地方:
一开始官方例程中会报错”const char”类型的实参与”LPCWSTR”类型的形参不兼容和不能将”const char”类型的值分配到”LPCWSTR”类型的实体,解决办法如下:
项目——项目属性——常规——项目默认值——字符集,把字符集设为未设置,确定。

源码如下:
#include
3.3关于MVS中的资料

D:\MVS\MVS\Development\Documentations 里面有各种语言及相关的SDK开发指南,如果是C++,也看《工业相机SDK开发指南 C》,里面关于工业相机的各种操作如取流、图像采集、图像处理等等都有详细的API调用,需要什么,就去这个文档中去查阅。
D:\MVS\MVS\Development\Samples\VC\VS 里面是VS项目的开发示例,前面六个是已经写好的MFC界面程序,具体的操控看示例程序说明VS2008.pdf,SimpleSamples中的是一个个小示例,在《工业相机SDK开发指南 C》里面有讲解。

发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/208822.html原文链接:https://javaforall.net


