
1. 背景和思路
2. 李雅普诺夫第二方法
3. 李雅普诺夫稳定性分析
4. 例题
1. 判断非线性定常系统稳定性:


首先这是二维系统。P是自己选的,要找一个2*2的矩阵。
先确定稳态:两个x的导数都为0,解出来是x1=x2=0,所以稳态是[0,0]’。
P取为I2,得到李雅普诺夫函数:

只要选正定的P,那么V(x)就是正定的,要验证的只是它的导数的负定性:

计算的时候代入x1和x2的导数的表达式就可以。这里a>0,V的导数是负定的。所以平衡状态是渐近稳定的。
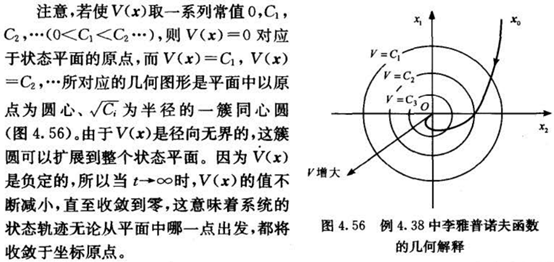
另外,当||x||无穷的时候,V也无穷,所以系统在整个状态空间中是大范围渐近稳定的。
大范围渐近稳定的意义:
2. 判断非线性定常系统稳定性:

平衡状态:[0,0]’。
选择P=I2,李雅普诺夫函数:

导数:

只有在x2=0和x2=-1两条直线上,导数为0,所以V的导数是半负定的。
3. 判断线性定常系统稳定性:

平衡状态:[0,0]’
李雅普诺夫函数:

变化率:

所以平衡状态是不稳定的。
4. 判断线性定常系统稳定性:

唯一平衡状态:原点。
取Q为单位阵,则李方程为:

整理成方程组:

因为P是对称的,所以

从而:

利用西尔韦斯特准则,可以得到:

所以P是正定的。所以系统是渐近稳定的。
但这里的Q是指定的,按理说要对任意给定的Q都存在P作为方程的解才行啊,不应该用一般的形式来证明吗?不需要,因为既然找到了合适的P,使得V正定,V的变化率负定,那么系统已经是渐近稳定的了。
5. 求线性定常离散时间系统的稳定性条件:

取Q为单位阵,解李方程:

写成方程组:

考虑P的对称性,解得:

要让P正定,必须满足:

解不等式得到:

这就是线性定常离散时间系统渐近稳定的充要条件了。这和用离散时间系统稳定性代数判据得到的结论是一样的。
5. 参考文献
[1] 田玉平,蒋珉,李世华.自动控制原理[M].北京:科学出版社,2006
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/208963.html原文链接:https://javaforall.net


