
一、简介
1.关于算法
D*Lite算法是Sven Koenig 和Maxim Likhachev 在2002年基于LPA*算法基础上提出的动态路径规划算法。它的优点是可以利用首次计算路径的信息动态规划路径。因此它可以应用于机器人在未知环境中的动态寻路。
D*Lite要解决的问题:
- 当再次寻路时,如果直接完全重新计算,那么固然会有很多重复运算,我们希望把上次寻路的数据利用起来。
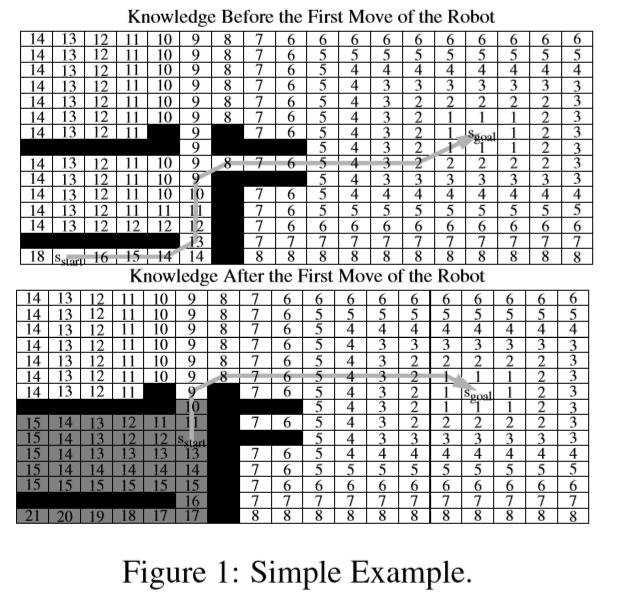
- 所以我们只需要处理终点到起点启发值改变的部分(下图中灰色部分)。然而这还不够好,因为事实上影响我们寻路的只有其中的很少一部分(Start→11→10三个点)。
所以D*Lite算法就是为了识别并处理这些真正影响到最终路径的点,而尽量忽略无关点的运算,从而提升再次寻路时的运算效率。

D*Lite存在的不足:
只有当地图发生局部变化时才有优势,如果地图整体上变动过大,修正路径的用时甚至比直接重新计算要长。 所以当地图过小或处于其它容易发生地图全局变动的情况下不建议使用。
在地形反复改变的情况下有小概率可能寻路失败,在Github中有多人有相同问题,如果要求100%成功率寻路,请改良或慎用。
2.关于本文
二、算法相关概念解释
1.基本概念
算法把地图分为若干个块(结点),每个块有自己的变量记录状态和数值。全局有一个队列来决定对哪个结点进行检测并更改。经过一系列检测后会根据每个块的数值,(使用贪婪算法)决定选择哪条路。
- 障碍物: 本文的障碍物都是指中途改变的障碍物。因为动态路径算法我们更关注中途障碍如何应对,所以我们只讨论中途障碍物,该算法自然也能应对初始障碍物的,不过在此不做详细分析。
- s: s表示上述的一个地图块(结点)
- predecessor: 前继点。可以到达该结点的所有其它结点,都称为该结点的前继点。
下图中,蓝点可以到达红点,所以蓝点是红点的predecessor(前继点)

- successor: 后继点。可以从该结点行进到的所有其它结点,都称为该结点的后继点。
下图中,红点可以到达蓝点,所以蓝点是红点的successor(后继点)

- PriorityQueue(又叫U): 待检测队列,里面按Key(下面提及的)大小存放待检测更新的结点。
- Key: 键值,用于上面说的queue(队列),当结点可能需要被检测时,需要加入queue,此时需要先为其按情况生成Key;对同一结点,不同情况会产生不同的Key,Key将成为寻路时结点检测先后顺序的依据。(具体计算方式后面介绍)
- Dequeue: 取出队列中的一个元素并进行检测,并按一定条件改变它的值。在此算法中将永远先取出Key值最小的元素。(后面继续解释)
值得注意的一点是:
99%的结点数值更新都只发生在此过程,这是算法的主要过程,其它过程一般不改变结点的相关变量值。(剩下1%是中途障碍物直接影响)
2.变量
- EdgeCost值: 该值表示两个相邻结点之间移动需要多少花费。(常用距离来估计)
比如相邻节点A,B EdgeCost为10,意味着在A移动到B(或相反)耗费为10。 - G值: 该值表示该结点到终点的花费值,值是由下面说的Rhs给予的。
在此算法中,G值可以意味着该结点到终点的最少耗费,但这不意味着G值在多次运算中具有实时性,当障碍物改变时,它会过时(不会及时变更,即可能不完全准确),然后不准确结点的G值在再次寻路被需要时重新计算。
一旦某结点的G值改变,它的影响会立刻作用到相邻(这点具体后面讲),正因如此,如果我们不改变不必要的G值,那么就可以减少相邻节点的无效计算。(这一个是逐个传递的,一个G值改变会影响相邻结点G值改变,由此观之不计算不必要的G值能有很大性能提升) - Rhs值(Right Hand Side): 描述当前结点到终点的花费值。(没错,与G值一样,事实上G值是由Rhs值给予的,即G=Rhs),Rhs值由终点起到该结点的EdgeCost依次累加起来。(是这么定义的,但是计算时我们不直接这么做,因为会造成很多重复运算)
G值和Rhs值的联系:
- G值在特定条件时由Rhs值赋值,即一次运算中永远先更新Rhs,后更新G
- 并非所有更新过的Rhs值都会赋值给对应结点的G(只有需要用到时才会赋值)
- 当发生G=Rhs赋值时,意味着G值改变,该结点的影响会立刻传递到它的predecessor(如前述)
- 单单Rhs值发生改变并不会把影响传递到临近predecessor
- 每次障碍改变时先更新Rhs值,可以粗略理解为Rhs为更新过的G
- H值(heuristic): 启发值,表示该点到起点的花费,可用坐标差或其它形式估算。
- Km值(KeyModifier): 键值修饰器,用于修饰Key,改变Key的值,它可以让Key与Key之间的数值比较对于实际而言更有意义(Key是结点在Queue中排列的依据,也就是说这个Km是改变Queue中结点的顺序,让其排序更加合理)
3.更多术语
UpdateVertex():
- 更新结点的函数,事实上是更新结点在Queue中的状态。它决定了该结点是否应该加入队列/在队列中更新Key值/移出队列。
- 判断规则:
- 当检测到结点G!=Rhs时会将其加入队列(若已在队列中则进行Key更新)
- 否则将其从队列中移除
- 当结点在以下情况时会触发该函数:
- 当结点被Dequeue过程处理完时,需要判断它是否需要再次加入队列。同时,该影响会传递到所有predecessor,对所有predecessor进行UpdateVertex
- 当结点受障碍物直接影响时,对其自身进行UpdateVertex
传递:
之前提到多次,其实就是对所有predecessor进行修改,并检测其是否需要加入队列。此过程会按顺序进行以下检测:
- 首先重新计算所有predecessor的Rhs(规则见下文三个状态中的阐述)
- 然后对所有predecessor进行结点更新,判断其是否需要加入队列
三个状态
在Queue(优先队列)中的结点我们会按照Key的顺序依次对它们进行检测(Dequeue),处于不同状态的结点会对应有不同操作,操作完毕后都会执行一次UpdateVertex函数以判断是否需要再次入队待命。状态分为如下三种:
下面这种状态的结点不会出现在队列中:
- Locally Consistent: 局部一致。当一个结点G=Rhs时为此状态。此状态表示结点处于预估与实际基本没有差错的稳定状态。如无外界影响,将一直保持此状态。处于该状态的结点不会被纳入Queue(检测队列)。
下面两种状态的结点会出现队列中,并且在Dequeue时会有不同的效果:
- Locally Overconsistent: 局部过一致。当一个结点G>Rhs时为此状态。Rhs更新后比G小,这意味着该结点如今的连通状态比之前要好。(可能障碍物被移除了)当Dequeue时检测到某结点为该状态时,会发生三件事:
- 令G=Rhs,即更改为Locally Consistent状态(因为它更好了,我们有理由把耗费降低到新的预估值)
- 将影响传递到所有predecessor:
在D*Lite的第二个版本中,这一步还会立刻尝试检测这个更新后的结点是否为它predecessor的更好successor,如果是,则把Rhs(终点花费估计)值设置为经由该点的值,否则将保留predecessor原来的Rhs - 执行UpdateVertex:由于G=Rhs,将其从队列中移除。如无外界障碍物改变,将一直保持在consistent状态
- Locally Underconsistent: 局部欠一致。当一个结点G
时为此状态。Rhs更新后比G大,这种情况只会出现在障碍物中途
出现时,这意味着
该结点已受到附近新障碍物的直接/间接影响,很可能已经不是一条最好的路径了(甚至走不通)。当Dequeue时检测到某结点为该状态时,会发生三件事:
- 令G=∞(因为它被暂时判定为“不连通”,花费为无限)
- 将影响传递到所有predecessor:
在D*Lite的第二个版本中,这一步还会立刻尝试对这些受影响的predecessor立刻找一个更好的successor。体现为把predecessor自身Rhs(终点花费估计值)设置为它所有successor中最低的 - 执行UpdateVertex:由于G!=Rhs,将它再次加入Queue以待作进一步判断
三、主要公式、过程&说明
定义EdgeCost:
c ( s , s ′ ) c(s,s’) c(s,s′)
计算G(理论上):
g ( s ) = { 0 , i f ( s = = s g o a l ) m i n s ′ ∈ s u c c ( s ) ( g ( s ′ ) + c ( s , s ′ ) ) , o t h e r w i s e g(s)=\left\{ \begin{aligned} &0&&, if(s==s_{goal}) &\\ &min_{s’\in succ(s)}(g(s’)+c(s,s’))&&,otherwise& \end{aligned} \right. g(s)={
0mins′∈succ(s)(g(s′)+c(s,s′)),if(s==sgoal),otherwise
实际上我们使用G=Rhs对G赋值,所以接下来大概也能猜到Rhs的公式是啥了……
计算Rhs:
r h s ( s ) = { 0 , i f ( s = = s g o a l ) m i n s ′ ∈ s u c c ( s ) ( g ( s ′ ) + c ( s , s ′ ) ) , o t h e r w i s e rhs(s)=\left\{ \begin{aligned} &0&&, if(s==s_{goal}) &\\ &min_{s’\in succ(s)}(g(s’)+c(s,s’))&&,otherwise& \end{aligned} \right. rhs(s)={
0mins′∈succ(s)(g(s′)+c(s,s′)),if(s==sgoal),otherwise
关于如何获取正确的G值与Rhs值:
注意到这里的rhs是根据successor的G值求的,意味着我们如果要得到正确的rhs(s),就必须先得到正确的g(s’)。那么我们怎么做到这一点呢?
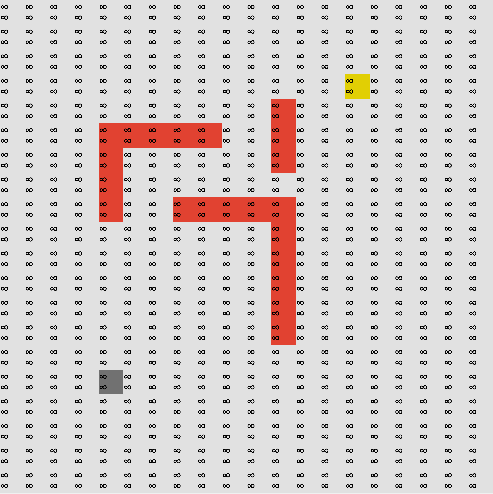
1.当第一次计算时:
我们可以从公式观察到,Sgoal的Rhs==0是已知的,事实上我们会把所有除Sgoal以外的Rhs值,包括Sgoal的所有G值初始化为∞
此时Sgoal处于Overconsistent,此时我们会对Sgoal进行Dequeue,进而对终点进行赋值G=Rhs,此时由于Sgoal的G值改变会影响周围predecessor
然后我们会为所有predecessor计算Rhs,然后predecessor会处于Overconsistent状态,加入Queue,继续Dequeue就可以得到这个predecessor的准确G值,然后继续向predecessor的predecessor传递这些影响……
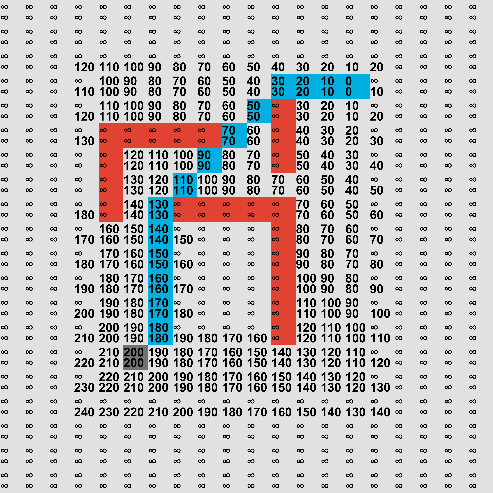
如此递推下去,第一次计算就可以获得任意结点的准确G值与Rhs值
2.当障碍物改变时:
正如前所述,我们的G值不会立刻改变,而且它会过时(可能不再完全准确),我们此时分两种情况,但仍然先按照旧的G值判断。
2.1.当障碍物消失时:
我们结合一个例子分析受EdgeCost减少影响的局部范围内的结点。
如果EdgeCost减少发生在图中红点与右方白点之间(下两图中右边6→1的地方)。那么对于 G
的结点,(即图中右边的两点),
它们更靠近Sgoal,所以它们的G值不可能依赖于红点(虽然例子中的箭头是单向通道,固然不依赖,但我在此强调的是,假设它是双向通道,它们的G值也不依赖于红点!!!),而是某些更靠近终点的点(不在图中展示),因此障碍物消失的
影响与右边的点无关,它们的G值仍然是正确的。 这其实是动态规划的一种体现。
而相对的,对于左边三个白点, 它们的G值在第一次计算时是由红点传递过去的,根据公式,它们的G值应该是G = G(红点)+Cost(红点,自己)。显然这个值是>G(红点)的。也就是说:对于G>G(红点)的点,它们之中可能有一部分依赖于红点(在这例子中左边的白点都是)。由于红点现在受到障碍物影响,依赖于红点的那部分结点也一样被影响了, G值是不准确的。(但是没有立刻被更新)

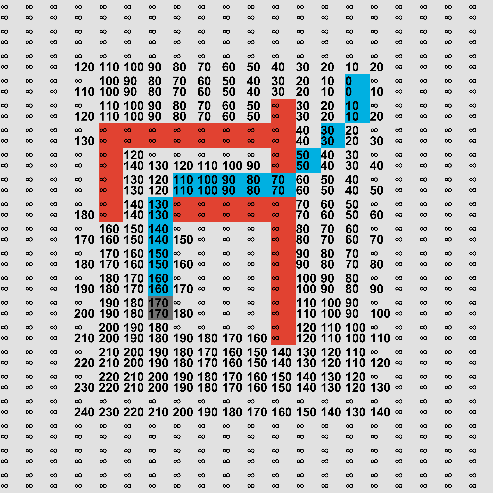
上图中红点受障碍物直接影响,EdgeCost减少为1,Rhs更新为5(=4+1),之后随着Dequeue,会先更新红点的G值(G=Rhs=5),然后向前传递,左边点的G值也会被陆续更新,因此我们可以获得准确的G值与Rhs值
2.2.当障碍物出现时:
如2.1所述,G
,而G>G(红点)的部分结点依赖于红点,比如左边三个白点。
由于障碍物出现,图中的EdgeCost由2增加到5
注意: 例子中的S2,由于通道的单向性,红点仅是它的predecessor,固它的G不依赖于红点。 而且S2中的改变与当前的讨论无关,在此可以暂时忽略


此时根据我们的算法,对红点Dequeue会使这个结点处于Underconsistent状态,即设置G=∞(类似于重置到初始状态),随着Dequeue继续进行,会把所有受牵连的结点,都设置为G=∞。之后如果再有影响传递到这些结点,那么一定是从连通至终点的路径传来的影响(比如其实这个例子中,红点最后会受到S2结点的影响而更新正确的G值,后面会进一步解释这个例子),此时就如同第一次计算时的情况一样,可以获得准确的G和Rhs

定义H(S到S’启发值):
h ( s , s ′ ) h(s,s’) h(s,s′)
※重要※:原论文中提及到:在不修改启发方式的情况下(即按照论文的启发实现),必须保证h(s, s’) ≤ c(s, s’) 且 h(s, s’’) ≤ h(s, s’) + h(s’, s’’),其中s,s’,s’’是任意三个结点
本人亲测,若不满足h(s, s’) ≤ c(s, s’),障碍物出现后所产生的影响常常不足以触发重新寻路(其实就是由于启发值设计不恰当,导致不满足进入寻路循环的条件。即当循环执行到失效结点的时候,并没有预期地进行更新检测,而是直接结束循环)
简要分析就是:由于c(cost)过大,c是决定g值的。当障碍物出现时,起点的g值衰减过快,导致起点key值
<失效结点key值,于是就不满足进入循环的条件了。(key的计算在下面;而且这个解释其实比较阴间,
如果是初次接触D*Lite还是忽略这个问题好了,只要注意不要踩雷就好
)
定义Key(非完全):
K e y = < m i n [ g ( s ) , r h s ( s ) ] + h ( s , s s t a r t ) , m i n [ g ( s ) , r h s ( s ) ] > Key \ = \ \ \
比较原则:先由Key中第一个元素决定Key大小,仅当第一个元素相等时再由第二个元素决定大小
上述Key值定义的一个问题:
由h值的定义,h与“S到起点的距离”有关。那么问题来了,我们的Sstart是会随着机器人移动而改变的(Sstart永远是机器人当前位置),那么就意味着这个Key中的H值也需要随之改变了,但我们之前已经计算出来的Key值用的还是旧的H值,怎么办呢?
根据机器人的行动远离或接近终点,新旧h值分别相差±Δh。
Δ h = h ( s l a s t , s s t a r t ) , s l a s t 为 上 一 个 s s t a r t 点 \Delta h = h(s_{last},s_{start}),\ s_{last}为上一个s_{start}点 Δh=h(slast,sstart), slast为上一个sstart点
比如机器人朝着终点行进一步,那么对于之前计算过的所有处于机器人前方的结点的Key都要相应减少一个Δh:
K e y u p d a t e d = < m i n [ g ( s ) , r h s ( s ) ] + h ( s , s l a s t ) − Δ h , m i n [ g ( s ) , r h s ( s ) ] > 注 意 在 机 器 人 移 动 后 , 对 于 计 算 过 的 旧 K e y , 在 计 算 时 的 s s t a r t 已 经 变 成 s l a s t 了 ( 值 无 变 化 , 但 是 意 味 着 过 时 了 ) Key_{updated} \ = \ \ \
\\注意在机器人移动后,对于计算过的旧Key,在计算时的s_{start}已经变成s_{last}了\\ (值无变化,但是意味着过时了)
然而这是非常痛苦的,设想我们有10000个计算过的Key,当我们机器人移动一次的时候,我们就要重新计算10000个Key……
解决策略:
说到底我们只是想:已经计算过的Key和接下来将计算的新Key具有可比性罢了(为了选出最小的key,方便我们决定结点的处理顺序)既然如此,与其对10000个已存在的Key值减Δh,为何不增加新计算Key值加Δh呢?对10000个旧Key-Δh或对新加入的一个Key+Δh,这样的排序结果是一样的。
该策略存在的瑕疵:
想必已经有很多人想到,上述情况中,对于靠近终点的结点而言确实需要-Δh,但是对于那些在机器人前进方向之后的结点,这个启发值应该+Δh,相差一个负号,这样笼统的一刀切,是不是不太好呢?
对此,一个解决方法是:求出Δh的代数值而非绝对值,但这有点难度,因此没采取这种方法。
这里用的第二个解决方法是:妥协,虽然存在这个小瑕疵,但它带来的效果远比重新计算10000个Key值划算,而且符号相反的情况不总是发生。这相当于是牺牲了部分启发准确性换来了效率,是值得的。所以下面……
定义Km(KeyModifier):
K m = { 0 , i f ( s l a s t = = n u l l ) K m + h ( s l a s t , s s t a r t ) , W h e n r o b o t m o v e s K_m=\left\{ \begin{aligned} &0&&, if(s_{last} == null) &\\ &K_m + h(s_{last},s_{start})&&,When\ robot\ moves& \end{aligned} \right. Km={
0Km+h(slast,sstart),if(slast==null),When robot moves
这就是上述的用来解决Key存在问题的Δh,由于机器人会移动多次,所以多个Δh累加我们定义为Km
定义Key(最终):
K e y = < m i n [ g ( s ) , r h s ( s ) ] + h ( s , s s t a r t ) + K m , m i n [ g ( s ) , r h s ( s ) ] > Key \ = \ \ \
这个Key值被Km修饰后比之前更加合理
定义PriorityQueue(优先队列U):
U = { ( K e y 1 , s i ) , ( K e y 2 , s j ) . . . ( K e y n , s k ) } , ( K e y 1 < K e y 2 < . . . < K e y n ) U \ = \{(Key_1,s_i),(Key_2,s_j)...(Key_n,s_k)\} ,\ (Key_1
U ={
(Key1,si),(Key2,sj)...(Keyn,sk)}, (Key1<Key2<...<Keyn)
Dequeue过程:
- G=∞
- 传递到所有predecessor(左边三个白点)
(事实上对于处于非稳定状态的predecessor我们也会把它加入队列,不过本例忽略) - 将该结点S1再次加入队列中,如下表:
U = { ( < 12 , 8 > , s 2 ) , ( < 14 , 10 > , s 1 ) . . . ( 其 它 可 能 存 在 结 点 本 例 中 省 略 ) } U \ = \{(<12,8>,s_2),(<14,10>,s_1)…(其它可能存在结点本例中省略)\} U ={
(<12,8>,s2),(<14,10>,s1)...(其它可能存在结点本例中省略)}
算法继续进行Dequeue过程,这次轮到S2,由于G>Rhs,处于Overconsistent状态,我们会:
- 令其G=Rhs
- 传递到所有predecessor(S1)
- 同时,由于此时G=Rhs,为Consistent状态,于是不再将S2加入队列。
由于这是D*Lite第二个版本,所以会检测S2是否为S1的更好successor,结果是肯定的,因此算法会先把S1的Rhs由10更新为9,然后更新在队列中的Key值
U = { ( < 13 , 9 > , s 1 ) . . . ( 其 它 可 能 存 在 结 点 本 例 中 省 略 ) } U \ = \{(<13,9>,s_1)…(其它可能存在结点本例中省略)\} U ={
(<13,9>,s1)...(其它可能存在结点本例中省略)}

最后DequeueS1,S1的G值最后被设置成9,处于稳定状态 这例子事实上也演示了障碍物出现后的寻路是如何得到正确的G值与Rhs值的。 此时S1的G值是由S2传递过来的。而S2的影响也绝对是从连通路径传递过来的(因为除了出现障碍物的结点可以传递影响以外,就只有从终点连通处传来了)

Dequeue过程就是如此,一步步地取出U中的Key,不断对结点进行更新,直到找到最终路径
四、整体框架
前面穿插着讲了不少算法的原理,其实已经解释完算法的核心了。但比较散乱,听着容易一头雾水。在这一节会对整个算法的流程做一个简述,帮助理解算法。
1.初始化
2.首次寻路
直到达到寻路结束的标准(详见后面的伪代码)
3.Robot行走
4.检测到障碍物改变
五、伪代码&解析
这一部分将会着重关注这些功能到底是如何一步步实现的
procedure CalculateKey(s)
{ 01 ’ } r e t u r n [ m i n ( g ( s ) , r h s ( s ) ) + h ( s s t a r t , s ) + k m ; m i n ( g ( s ) , r h s ( s ) ) ] ; \{01’\}return [min(g(s), rhs(s)) + h(s_{start},s)+km; min(g(s), rhs(s))]; {
01’}return[min(g(s),rhs(s))+h(sstart,s)+km;min(g(s),rhs(s))];
procedure Initialize()
{ 02 ’ } U = ∅ ; \{02’\}U = ∅; {
02’}U=∅;
{ 03 ’ } k m = 0 ; \{03’\}km = 0; {
03’}km=0;
{ 04 ’ } f o r a l l s ∈ S , r h s ( s ) = g ( s ) = ∞ ; \{04’\}for\ all\ s ∈ S,\ \ rhs (s)=g(s)=∞; {
04’}for all s∈S, rhs(s)=g(s)=∞;
{ 05 ’ } r h s ( s g o a l ) = 0 ; \{05’\}rhs(s_{goal})=0; {
05’}rhs(sgoal)=0;
{ 06 ’ } U . I n s e r t ( s g o a l , C a l c u l a t e K e y ( s g o a l ) ) ; \{06’\}U.Insert(s_{goal}, CalculateKey(s_{goal})); {
06’}U.Insert(sgoal,CalculateKey(sgoal));
procedure UpdateVertex(u)
{ 07 ’ } i f ( g ( u ) ≠ r h s ( u ) A N D u ∈ U ) U . U p d a t e ( u , C a l c u l a t e K e y ( u ) ) ; \{07’\}if (g(u) \neq rhs(u)\ AND\ u ∈ U) U.Update(u, CalculateKey(u)); {
07’}if(g(u)=rhs(u) AND u∈U)U.Update(u,CalculateKey(u));
{ 08 ’ } e l s e i f ( g ( u ) ≠ r h s ( u ) A N D u ∉ U ) U . I n s e r t ( u , C a l c u l a t e K e y ( u ) ) ; \{08’\}else\ if (g(u) \neq rhs(u)\ AND\ u \notin U) U.Insert(u, CalculateKey(u)); {
08’}else if(g(u)=rhs(u) AND u∈/U)U.Insert(u,CalculateKey(u));
{ 09 ’ } e l s e i f ( g ( u ) = r h s ( u ) A N D u ∈ U ) U . R e m o v e ( u ) ; \{09’\}else\ if (g(u)=rhs(u)\ AND\ u ∈ U) U.Remove(u); {
09’}else if(g(u)=rhs(u) AND u∈U)U.Remove(u);
procedure ComputeShortestPath()
{ 10 ’ } w h i l e ( U . T o p K e y ( ) < C a l c u l a t e K e y ( s s t a r t ) O R r h s ( s s t a r t ) > g ( s s t a r t ) ) \{10’\}while (U.TopKey()
g (s_{start}))
10’}while(U.TopKey()<CalculateKey(sstart) OR rhs(sstart)>g(sstart))
{ 11 ’ } u = U . T o p ( ) ; //开始一次Dequeue \{11’\}\quad u = U.Top();\quad \textbf{ //开始一次Dequeue} {
11’}u=U.Top(); //开始一次Dequeue
{ 12 ’ } k o l d = U . T o p K e y ( ) ; \{12’\}\quad k_{old} = U.TopKey(); {
12’}kold=U.TopKey();
{ 13 ’ } k n e w = C a l c u l a t e K e y ( u ) ) ; \{13’\}\quad k_{new} = CalculateKey(u)); {
13’}knew=CalculateKey(u));
{ 14 ’ } i f ( k o l d < k n e w ) //先看看该结点Key值是否需要更新 \{14’\}\quad if(k_{old}
{
14’}if(kold<knew) //先看看该结点Key值是否需要更新
{ 15 ’ } U . U p d a t e ( u , k n e w ) ; //是则直接更新结点在U中位置并进入下一循环 \{15’\}\quad \quad U.Update(u, k_{new});\quad \textbf{ //是则直接更新结点在U中位置并进入下一循环} {
15’}U.Update(u,knew); //是则直接更新结点在U中位置并进入下一循环
{ 16 ’ } e l s e i f ( g ( u ) > r h s ( u ) ) //局部过一致 \{16’\}\quad else\ if (g(u) > rhs (u))\quad \textbf{ //局部过一致} {
16’}else if(g(u)>rhs(u)) //局部过一致
{ 17 ’ } g ( u ) = r h s ( u ) ; \{17’\}\quad\quad g(u)=rhs(u); {
17’}g(u)=rhs(u);
{ 18 ’ } U . R e m o v e ( u ) ; \{18’\}\quad\quad U.Remove(u); {
18’}U.Remove(u);
{ 19 ’ } f o r a l l s ∈ P r e d ( u ) //对u的所有predecessor \{19’\}\quad\quad for\ all\ s ∈ Pred(u) \textbf{ //对u的所有predecessor} {
19’}for all s∈Pred(u) //对u的所有predecessor
{ 20 ’ } i f ( s ≠ s g o a l ) r h s ( s ) = m i n ( r h s ( s ) , c ( s , u ) + g ( u ) ) ; //如果u是更好的successor则更改predecessor的Rhs \{20’\}\quad\quad\quad if (s \neq s_{goal}) \\ \quad\quad \quad\quad \quad\quad \quad rhs(s) = min(rhs(s),c(s, u)+g(u));\textbf{ //如果u是更好的successor则更改predecessor的Rhs} {
20’}if(s=sgoal)rhs(s)=min(rhs(s),c(s,u)+g(u)); //如果u是更好的successor则更改predecessor的Rhs
{ 21 ’ } U p d a t e V e r t e x ( s ) ; \{21’\}\quad\quad\quad UpdateVertex(s); {
21’}UpdateVertex(s);
{ 22 ’ } e l s e //局部欠一致 \{22’\}\quad else\quad \textbf{ //局部欠一致} {
22’}else //局部欠一致
{ 23 ’ } g o l d = g ( u ) ; \{23’\}\quad\quad g_{old} = g(u); {
23’}gold=g(u);
{ 24 ’ } g ( u ) = ∞ ; \{24’\}\quad\quad g(u)=∞; {
24’}g(u)=∞;
{ 25 ’ } f o r a l l s ∈ P r e d ( u ) ∪ u //检测所有predecessor和自己 \{25’\}\quad\quad for\ all\ s ∈ Pred(u) ∪{u}\quad \textbf{ //检测所有predecessor和自己} {
25’}for all s∈Pred(u)∪u //检测所有predecessor和自己
{ 26 ’ } i f ( r h s ( s ) = c ( s , u ) + g o l d ) //这意味着u曾是最好结点,但如今u堵塞了 \{26’\}\quad\quad\quad if (rhs(s)=c(s, u)+g_{old})\textbf{ //这意味着u曾是最好结点,但如今u堵塞了} {
26’}if(rhs(s)=c(s,u)+gold) //这意味着u曾是最好结点,但如今u堵塞了
{ 27 ’ } i f ( s ≠ s g o a l ) r h s ( s ) = m i n s ′ ∈ S u c c ( s ) ( c ( s , s ′ ) + g ( s ′ ) ) ; //为s找新的最优结点 \{27’\}\quad\quad\quad\quad if (s \neq s_{goal}) rhs(s) = min_{s’∈Succ(s)}(c(s, s’)+g(s’)); \textbf{ //为s找新的最优结点} {
27’}if(s=sgoal)rhs(s)=mins′∈Succ(s)(c(s,s′)+g(s′)); //为s找新的最优结点
{ 28 ’ } U p d a t e V e r t e x ( s ) ; \{28’\}\quad\quad\quad UpdateVertex(s); {
28’}UpdateVertex(s);
关于Dequeue循环终止的条件:
- 起点要达到Consistent状态
- 队列中最小Key值小于起点的潜在Key值(即使起点不在队列中事实上我们也能为它计算Key)
Key值越小意味着越接近终点。而队列中Key比起点Key要大,说明它们比起点更远离终点,所以它们在绕远路,没有必要对它们进行Dequeue了
procedure Main()
{ 29 ’ } s l a s t = s s t a r t ; \{29’\}s_{last} = s_{start}; {
29’}slast=sstart;
{ 30 ’ } I n i t i a l i z e ( ) ; \{30’\}Initialize(); {
30’}Initialize();
{ 31 ’ } C o m p u t e S h o r t e s t P a t h ( ) ; \{31’\}ComputeShortestPath(); {
31’}ComputeShortestPath();
{ 32 ’ } w h i l e ( s s t a r t ≠ s g o a l ) ; \{32’\}while (s_{start} \neq s_{goal}); {
32’}while(sstart=sgoal);
{ 33 ’ } / ∗ i 如 果 g ( s s t a r t ) = = ∞ , 则 没 有 路 径 ∗ / \{33’\}\quad /* i如果g(s_{start})==∞,则没有路径 */ {
33’}/∗i如果g(sstart)==∞,则没有路径∗/
{ 34 ’ } s s t a r t = a r g m i n s ′ ∈ S u c c ( s s t a r t ) ( c ( s s t a r t , s ′ ) + g ( s ′ ) ) ; //贪婪地选最佳结点 \{34’\}\quad s_{start} = arg min_{s’∈Succ(s_{start})}(c(s_{start},s’)+g(s’));\quad \textbf{ //贪婪地选最佳结点} {
34’}sstart=argmins′∈Succ(sstart)(c(sstart,s′)+g(s′)); //贪婪地选最佳结点
{ 35 ’ } M o v e t o s s t a r t ; //机器人移动 \{35’\}\quad Move\ to\ s_{start};\quad \textbf{ //机器人移动} {
35’}Move to sstart; //机器人移动
{ 36 ’ } S c a n g r a p h f o r c h a n g e d e d g e c o s t s ; //检测中途障碍物改变 \{36’\}\quad Scan\ graph\ for\ changed\ edge\ costs;\quad \textbf{ //检测中途障碍物改变} {
36’}Scan graph for changed edge costs; //检测中途障碍物改变
{ 37 ’ } i f a n y e d g e c o s t s c h a n g e d \{37’\}\quad if\ any\ edge\ costs\ changed {
37’}if any edge costs changed
{ 38 ’ } k m = k m + h ( s l a s t , s s t a r t ) ; //计算Km \{38’\}\quad\quad k_{m} = k_{m} + h(s_{last},s_{start});\quad\textbf{ //计算Km} {
38’}km=km+h(slast,sstart); //计算Km
{ 39 ’ } s l a s t = s s t a r t ; \{39’\}\quad\quad s_{last} = s_{start}; {
39’}slast=sstart;
{ 40 ’ } f o r a l l d i r e c t e d e d g e s ( u , v ) w i t h c h a n g e d e d g e c o s t s //对所有直接影响的结点 \{40’\}\quad\quad for\ all\ directed\ edges (u, v) with\ changed\ edge\ costs \textbf{ //对所有直接影响的结点} {
40’}for all directed edges(u,v)with changed edge costs //对所有直接影响的结点
{ 41 ’ } c o l d = c ( u , v ) ; //记录之前的花费 \{41’\}\quad\quad\quad cold = c(u, v);\quad \textbf{ //记录之前的花费} {
41’}cold=c(u,v); //记录之前的花费
{ 42 ’ } U p d a t e t h e e d g e c o s t c ( u , v ) ; \{42’\}\quad\quad\quad Update\ the\ edge\ cost\ c(u, v); {
42’}Update the edge cost c(u,v);
{ 43 ’ } i f ( c o l d > c ( u , v ) ) //如果是障碍物消失 \{43’\}\quad\quad\quad if (c_{old} >c (u, v)) \quad \textbf{//如果是障碍物消失} {
43’}if(cold>c(u,v))//如果是障碍物消失
{ 44 ’ } i f ( u ≠ s g o a l ) r h s ( u ) = m i n ( r h s ( u ) , c ( u , v ) + g ( v ) ) ; //结点更好则取代 \{44’\}\quad\quad\quad\quad if (u \neq s_{goal})\\\quad\quad\quad\quad\quad\quad\quad\ \ rhs(u) = min(rhs(u),c(u, v)+g(v));\quad \textbf{//结点更好则取代} {
44’}if(u=sgoal) rhs(u)=min(rhs(u),c(u,v)+g(v));//结点更好则取代
{ 45 ’ } e l s e i f ( r h s ( u ) = c o l d + g ( v ) ) //如果是障碍物出现,判断结点v在以前是否为u的最佳successor \{45’\}\quad\quad\quad else\ if (rhs(u)=c_{old} + g(v))\quad \quad \textbf{//如果是障碍物出现,判断结点v在以前是否为u的最佳successor} {
45’}else if(rhs(u)=cold+g(v))//如果是障碍物出现,判断结点v在以前是否为u的最佳successor
{ 46 ’ } i f ( u ≠ g o a l ) //如果是且非终点,则为u寻找新的successor r h s ( u ) = m i n s ′ ∈ S u c c ( u ) ( c ( u , s ′ ) + g ( s ′ ) ) ; \{46’\}\quad\quad\quad\quad if (u \neq _{goal})\quad \textbf{//如果是且非终点,则为u寻找新的successor}\\ \quad\quad\quad\quad\quad\quad\quad\ \ rhs(u) = min_{s’∈Succ(u)}(c(u, s’)+g(s’)); {
46’}if(u=goal)//如果是且非终点,则为u寻找新的successor rhs(u)=mins′∈Succ(u)(c(u,s′)+g(s′));
{ 47 ’ } U p d a t e V e r t e x ( u ) ; \{47’\}\quad\quad\quad UpdateVertex(u); {
47’}UpdateVertex(u);
{ 48 ’ } C o m p u t e S h o r t e s t P a t h ( ) ; //重新计算路径 \{48’\}\quad\quad ComputeShortestPath();\quad \textbf{//重新计算路径} {
48’}ComputeShortestPath();//重新计算路径
六、例子
七、主要源码
八、Unity完整演示项目
纯演示预览:
下载地址
D*Lite演示预览
截图:
Unity完整项目:
D*Lite算法 Unity 2019.3.4项目文件
- 注意下载前留意Unity版本号不能过低
- 直接在Unity中运行效率会比Build完后低,所以里面的时间显示仅供参考(而且这不代表是整个算法的完整执行时间,只是Dequeue过程的时间,甚至不包括循环间隔(看源码里面的几个stopwatch就知道了))
- 在这个项目我事实上做了一些变通,Km和H的计算方式没有完全依据算法,另外注释掉了一些感觉用不上的过程
- 还有队列的储存方式为了贪方便只是用了个单向链表,查找时还是很慢的,如果改变储存方式其实能有进一步提升
九、尾声
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/212589.html原文链接:https://javaforall.net


