
前言:利用a单片机按键按下发送数值给单片机b,b单片机收到对应的数值,来控制从单片机b的P1口,点亮对于的8位LED灯。
提示:本次博主都把软件和硬件全部介绍,也希望对大家有帮助,有什么好的意见或者建议,能告诉博主将会十分感激。
一、项目分析
两个单片机都使用串口方式1进行通信,并且必须保证两单片机通信波特率完全一致,否则接受不到正确的数。在发送数据时,向SBUF中写入一个数据后,使用 “while(!TI);” 等待是否发送完毕,因为当发送完毕后,TI被硬件置1,然后才退出 “while(!TI);” 接下来在将TI手动清零,同理,在接受数据时,在中断服务程序中也需要将接受中断标志位RI置零。
二、程序设计
a完成发送,b完成接收。编写程序设置a,令SM0=0,SM1=1(串行口工作方式1)。设置b,令SM0=0,SM1=1,REN=1,使接收允许。
(1)a单片机程序[数据发送程序]
#include
(2)b单片机程序[数据接收程序]
#include
三、硬件设计
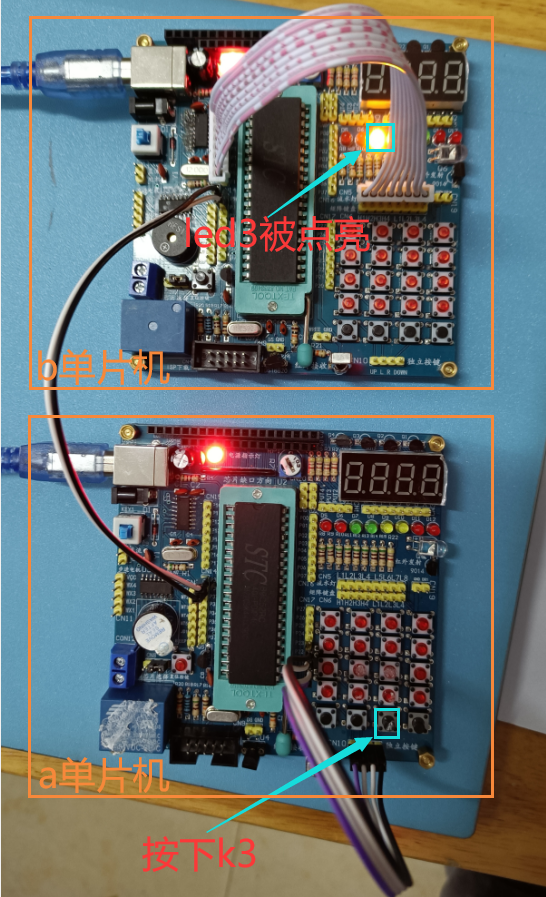
a单片机与b单片机连线(把这两个程序分别烧写到两块板子上,然后用连接线分别连接两个板子的发送引脚和接收引脚。)
四、功能实现展示

总结
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/215299.html原文链接:https://javaforall.net


