
同步发电机转子的转动惯量与运动方程(一) 基本物理概念
1.1 转动惯量
转动惯量又称惯性矩(Moment of inertia),通常以J表示,国际单位制下的量纲为[kg·m2]。转动惯量是一个物体对于其旋转运动的惯性大小的量度。一个刚体对于某转轴的转动惯量决定了对于这物体绕着这转轴进行某种角加速度运动所需要施加的力矩。转动惯量在转动力学中的角色相当于线性动力学中的质量,描述角动量、角速度、力矩和角加速度等数个物理量之间的关系。
def. 1 转动惯量
| 问题维度 | 质量微元 |
|---|---|
| 线质量(一维物体,如棒子等) | d m = λ d l dm = λdl dm=λdl |
| 面质量(二维物体,如薄板等) | d m = σ d s dm = σds dm=σds |
| 体质量(三维物体,如球体等) | d m = ρ d V dm = ρdV dm=ρdV |
def. 2 旋转动能
旋转动能或角动能是物体旋转的动能,是物体总动能的一部分。若固定参考系于物体的质心,则旋转动能Er与物体转动惯量J之间的关系为:
E r = 1 2 J ω 2 E_r = \frac {1}{2}Jω^2 Er=21Jω2
特别注意,旋转动能的表达式与平移运动中动能的方程式的非常相似:
E k = 1 2 m v 2 E_k = \frac {1}{2}mv^2 Ek=21mv2
可以看出,在旋转系里,转动惯量J代替了质量m的角色;角速度ω代替了直线速度v的角色。
1.2 力矩
作用力促使物体绕着转动轴或支点转动的趋向,称为力矩(torque),转动力矩又称为转矩。因此在正常运行的同步发电机中,力矩应该更贴切地表述为转矩。推挤或拖拉涉及到作用力,而扭转则涉及到力矩。力矩等于径向矢量r与作用力F的外积。
def. 3 力矩
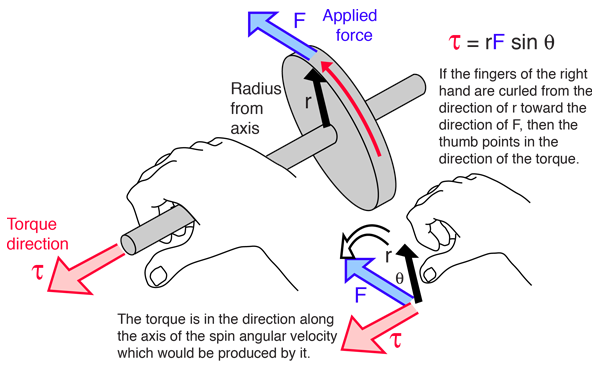
力矩等于作用于杠杆的作用力F乘以支点到力的垂直距离。另外,力矩是个矢量,其方向为:与它所造成的旋转运动的旋转轴同方向。力矩的方向可以用右手定则来决定:右手平面垂直于径向矢量r与作用力F所确定的平面,四指从径向矢量r向作用力F抓去,则大拇指指向即为力矩T的方向。下图描述了如何使用右手定则确定力矩T、径向矢量r、作用力F之间的空间位置关系(图片来自维基百科)。

假设作用力F作用在位置为r的粒子上。若选择原点为参考点,力矩T的定义为:
T ⃗ = r ⃗ × F ⃗ \vec T = \vec r \times \vec F T=r×F
力矩T的大小为:
T = ∣ r ⃗ ∣ ⋅ ∣ F ⃗ ∣ ⋅ s i n θ T = |\vec r|·|\vec F|·sinθ T=∣r∣⋅∣F∣⋅sinθ
根据国际单位制,力矩T的量纲是[N·m]=[ kg·m2·s−2]。其中,θ为径向矢量r与作用力F之间的夹角。
1.3 角动量
1.4 力矩、角动量、能量和功率之间的关系
1.4.1 力矩与角动量之间的关系
在经典力学领域中,同一个物体在一个确定的参考系中具有确定的动量,动量的数值取决于两个物理量的数值:运动物体在参考系中的质量m与速度v。在物理学中,动量的定义如下:
p ⃗ = m v ⃗ \vec p = m \vec v p=mv
将动量对时间求一阶导数,得:
d p ⃗ d t = m d v ⃗ d t + v ⃗ d m d t \frac {d \vec p}{d t} = m \frac {d \vec v}{d t} + \vec v \frac {d m}{d t} dtdp=mdtdv+vdtdm
这是最精确的表述,质量m在高速(接近光速)时会因为相对论影响而增大,但我们一般只研究低速时的问题,所以近似认为:
v ⃗ d m d t ≈ 0 ⃗ \vec v \frac {d m}{d t} \approx \vec 0 vdtdm≈0
因此,从某种意义上讲,下面这个我们平时研究的式子反而是简化过的:
d p ⃗ d t = m d v ⃗ d t = m a ⃗ = F ⃗ \frac {d \vec p}{d t} = m \frac {d \vec v}{d t} = m \vec a = \vec F dtdp=mdtdv=ma=F
即,作用力F是动量p的变化率。
在力矩与角动量也有类似的关系。假设一个粒子相对原点的位置矢量为r,动量为p。选择原点为参考点,此粒子的角动量为L:
L ⃗ = r ⃗ × p ⃗ \vec L = \vec r \times \vec p L=r×p
粒子的角动量L对时间t的导数为:
d L ⃗ d t = r ⃗ × d p ⃗ d t + p ⃗ × d r ⃗ d t = m r ⃗ × d v ⃗ d t + m v ⃗ × v ⃗ = r ⃗ × m a ⃗ \frac {d \vec L}{d t} = \vec r \times \frac {d \vec p}{d t} + \vec p \times \frac {d \vec r}{d t} = m \vec r \times \frac {d \vec v}{d t} + m \vec v \times \vec v = \vec r \times m \vec a dtdL=r×dtdp+p×dtdr=mr×dtdv+mv×v=r×ma
d L ⃗ d t = r ⃗ × F ⃗ \frac {d \vec L}{d t} = \vec r \times \vec F dtdL=r×F
而力矩T的定义为:
T ⃗ = r ⃗ × F ⃗ \vec T = \vec r \times \vec F T=r×F
因此,可以看出,类似于“动量—力”之间的关系,“角动量—力矩”之间同时满足:
d L ⃗ d t = T ⃗ \frac {d \vec L}{d t} = \vec T dtdL=T
L ⃗ = J ω ⃗ \vec L = J \vec ω L=Jω
即力矩T是角动量L对时间的导数。进一步可以推导出:
T ⃗ = J d ω ⃗ d t \vec T = J \frac {d \vec ω}{d t} T=Jdtdω
1.4.2 力矩、能量、功率之间的关系
假设施加作用力F于某一物体,使得此物体移动一段位移s,则作用力对于此物体做了机械功W。类似地,假设施加力矩于某一物体,使得此物体旋转一段角位移,则力矩对于此物体做了机械功。对于穿过质心的固定轴的旋转运动,以数学方程表达为:
W = ∫ θ 1 θ 2 T d θ W = \int_{θ_1 }^{θ_2} Tdθ W=∫θ1θ2Tdθ
式中,W为机械功,θ1、θ2分别为初始角与终止角。而功率P是机械功对时间的导数,因此,对于旋转运动而言,应有:
P = d W d t = T ⃗ ⋅ ω ⃗ P = \frac {d W}{d t} = \vec T · \vec ω P=dtdW=T⋅ω
请注意,力矩T注入的功率只跟瞬时角速度有关,而角速度是否在增加中,或在减小中,或保持不变,功率都与这些状况无关。
下图描述了力矩T、角动量L、作用力F、动量p、位置矢量r之间的空间位置关系(图片来自维基百科)。

1.5 量纲!量纲!!量纲!!!
上面的式子是在有名值下的推导,因此,尤其需要注意量纲问题。虽然有些老生常谈的感觉,但是,如果不在这里明确有名值下的物理关系,在推导使用标幺值下的公式(也就是后一篇文章里讨论的内容,虽然可能来不及写…)时,可能会犯各种各样的错误,因此将这些单位归纳总结如下。
| 物理量 | 单位 | 国际标准单位 |
|---|---|---|
| 转动惯量J | kg·m2 | kg·m2 |
| 作用力F | N | kg·m·s-2 |
| 力矩T | N·m | kg·m2·s-2 |
| 角动量L | kg·m2·s-1 | kg·m2·s-1 |
| 功率P | W | kg·m2·s−3 |
| 角速度ω | rad·s-1 | s-1 |
辅助理解传送门
第二部分:同步发电机的转子运动方程
https://blog.csdn.net/_/article/details/
参考文献
- https://zh.wikipedia.org/wiki/轉動慣量 .
- https://zh.wikipedia.org/wiki/旋转动能 .
- https://zh.wikipedia.org/wiki/力矩 .
- https://zh.wikipedia.org/wiki/角动量
- https://zh.wikipedia.org/wiki/国际单位制 .
- https://zh.wikipedia.org/wiki/角速度
- https://zh.wikipedia.org/wiki/动量 .
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/225503.html原文链接:https://javaforall.net


