
现代控制理论(二)李雅普诺夫稳定性分析
一、李雅普诺夫稳定性概念
1、平衡状态
2、李雅普诺夫稳定性定义(通俗理解)

(2)渐进稳定性
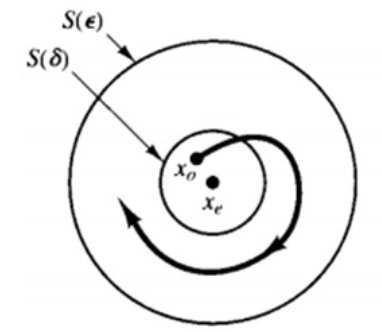
如果平衡状态 xe 受到扰动后,最终都会收敛到 xe ,我们就称 xe 在李雅普诺夫意义下是渐进稳定的,也就是说不仅需要满足李亚普诺夫意义下的稳定性的要求,同时最后这个解要无限逼近平衡状态/平衡点,最后收敛。
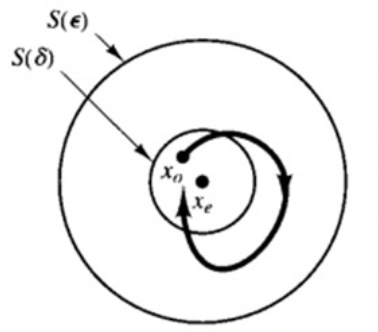
(3)大范围稳定性(全局稳定)
如果平衡状态 xe 受到任何扰动后,最终都会收敛到 xe ,我们就称 xe 在李雅普诺夫意义下是大范围内渐进稳定的,也就是说从状态空间上任意一点出发,最后都能收敛到平衡状态/平衡点。
二、李雅普诺夫稳定性间接判别法(第一方法)
间接法是利用状态方程的解的特性来判断系统稳定性的方法,它适用于线性定常、线性时变及可线性化的非线性系统。
线性定常系统的特征值判据:

上述系统渐进稳定的充分必要条件是:系统矩阵A的全部特征值位于复平面左半部。
三、李雅普诺夫稳定性直接判别法(第二方法)
直接法是利用李雅普诺夫函数直接对平衡状态稳定性进行判断,无需求出系统状态方程的解,它适用于各种控制系统。
一个非常天才的想法,稳定的系统能量总是不断被耗散的,随着时间的推移,系统迟早会到达稳定状态。实际系统的能量函数表达式相当的难找,因此李雅普诺夫引入了广义能量函数,称之为李雅普诺夫函数。
李雅普诺夫函数:与x1,x2…xn及t相关,是一个标量函数,记为V(x,t)。考虑到能量总大于0,故为正定函数,能量衰减用V(x,t)的一阶导数表示。不过迄今为止没有形成构造李雅普诺夫函数的通用方法,需要经验和技巧。实践表明,对于大多数系统,可先尝试一下的二次型函数作为李雅普诺夫函数。

判断定理:
定理一:V(x,t)正定;V’(x,t)负定;原点渐进稳定。
定理一:V(x,t)正定;V’(x,t)负半定,且在非零状态不恒为0;原点渐进稳定。
定理一:V(x,t)正定;V’(x,t)负半定,且在非零状态恒为0;原点李雅普诺夫稳定。
定理一:V(x,t)正定;V’(x,t)正定;原点不稳定。
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/226325.html原文链接:https://javaforall.net

![全面理解Java内存模型(JMM)及volatile关键字[通俗易懂]](https://javaforall.net/wp-content/uploads/2020/11/2020110817443450-480x300.jpg)
