
拉氏变换和拉氏反变换


1、拉式变换及其反变换
syms s; syms a positive; f=3*a^2/(s^3+a^3); f=simplify(ilaplace(f)) 结果 如下:
f= exp(-a*t) - exp((a*t)/2)*(cos((3^(1/2)*a*t)/2) - 3^(1/2)*sin((3^(1/2)*a*t)/2)) Z变换及其反变换
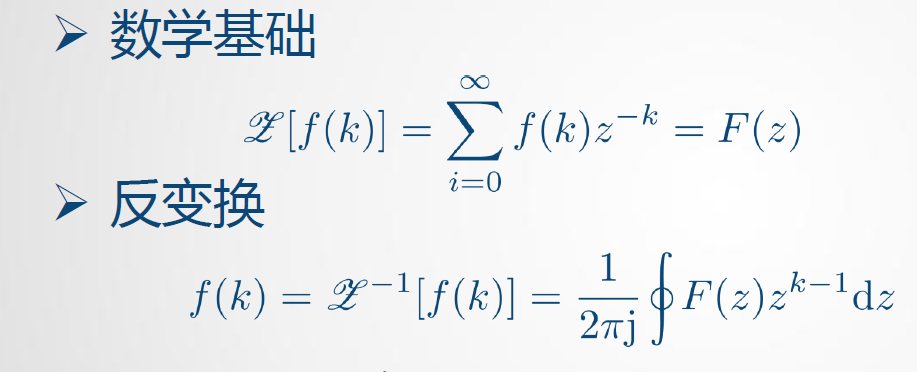
与拉氏变换相似,先声明符号变量然后调用ztrans和iztrans即可。
但值得注意的是:

算法如下:
syms p q z; for m=1:5 disp(simplify(iztrans(q/(1/(z-p)^m)))) end -q*(p*kroneckerDelta(n, 0) - iztrans(z, z, n)) q*iztrans(z^2, z, n) - 2*p*q*iztrans(z, z, n) + p^2*q*kroneckerDelta(n, 0) q*iztrans(z^3, z, n) - 3*p*q*iztrans(z^2, z, n) + 3*p^2*q*iztrans(z, z, n) - p^3*q*kroneckerDelta(n, 0) q*iztrans(z^4, z, n) - 4*p*q*iztrans(z^3, z, n) - 4*p^3*q*iztrans(z, z, n) + p^4*q*kroneckerDelta(n, 0) + 6*p^2*q*iztrans(z^2, z, n) q*iztrans(z^5, z, n) - 5*p*q*iztrans(z^4, z, n) + 5*p^4*q*iztrans(z, z, n) - p^5*q*kroneckerDelta(n, 0) + 10*p^2*q*iztrans(z^3, z, n) - 10*p^3*q*iztrans(z^2, z, n) 版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/227065.html原文链接:https://javaforall.net


