
目录
?论文下载地址
[论文地址]
?代码下载地址
[代码地址-unofficial]
??论文作者
Ruichao Hou, Dongming Zhou, Rencan Nie, Dong Liu, Lei Xiong, Yanbu Guo, and Chuanbo Yu
?模型讲解
[背景介绍]
图像融合时信息融合的一种,本质就是增强技术,运用多传感器获得的不同数据来提高网络性能。相对于单传感器的数据局限于一种数据的特性,多传感器能同时利用多中数据的特性,在视频监控、卫星成像、军事上都有很好的发展前景。对于本文来说,可见图像提供了丰富的纹理细节和环境信息,而红外图像则受益于夜间可见性和对高动态区域的抑制。如下图所示,左边时红外图像,右边是可见光图像。


图像融合最关键的技术是怎么样能融合利用多种数据的优势。往往引入多种数据是双面性的,所以要抑制数据的不同带来的干扰。例如做变化检测的时候,往往因为成像不同而网络会错误地检测为变化。
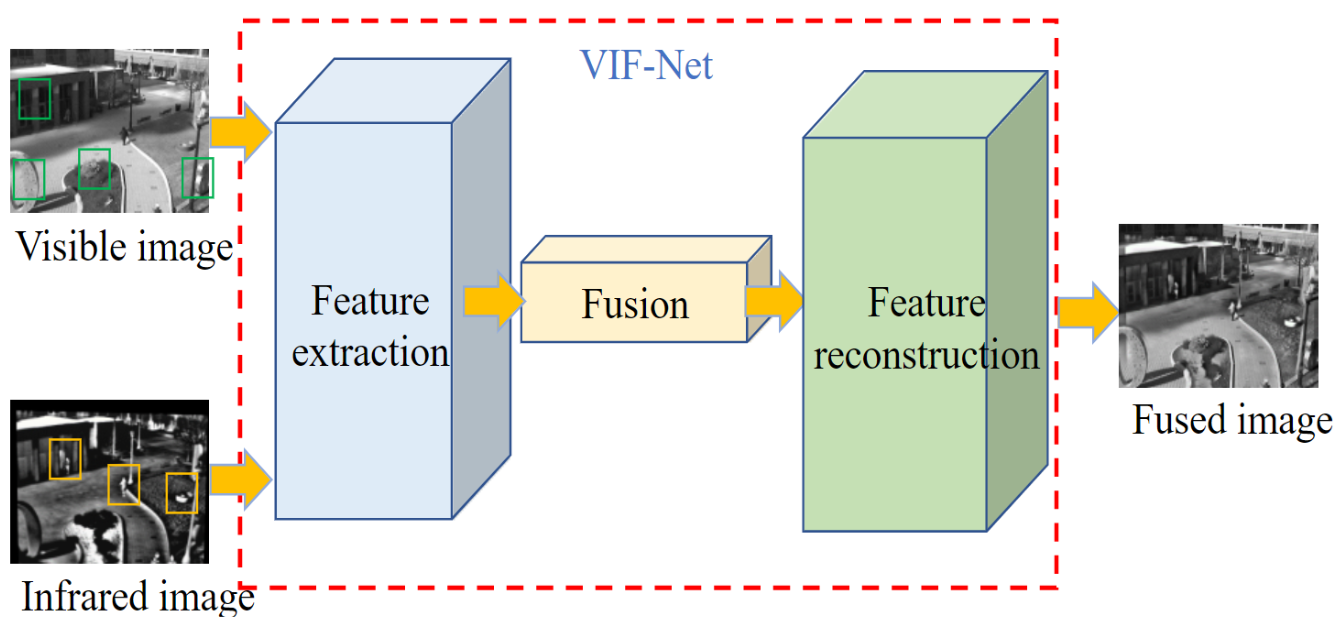
上图展示了图像融合的基本操作,将可见光和红外图像同时输入网络中,进行特征提取,之后进行特征融合,最后特征重建,生成融合图像。中间网络的部分也就是作者提出的VIF-Net。
[论文解读]
作者主要针对其他融合方法有计算成本的局限性,而且需要手动设计融合规则。由此,作者提出了自适应的端到端深度融合框架VIF-Net,旨在生成信息更丰富的图像,包含大量的热信息和纹理细节。
[VIF-Net网络结构]
VIF-Net的全称为Visible and Infrared image Fusion Network就是可见光和红外图像融合网络。VIF-Net体系结构如下图所示,它由三个主要组件组成:特征提取,融合和重建。
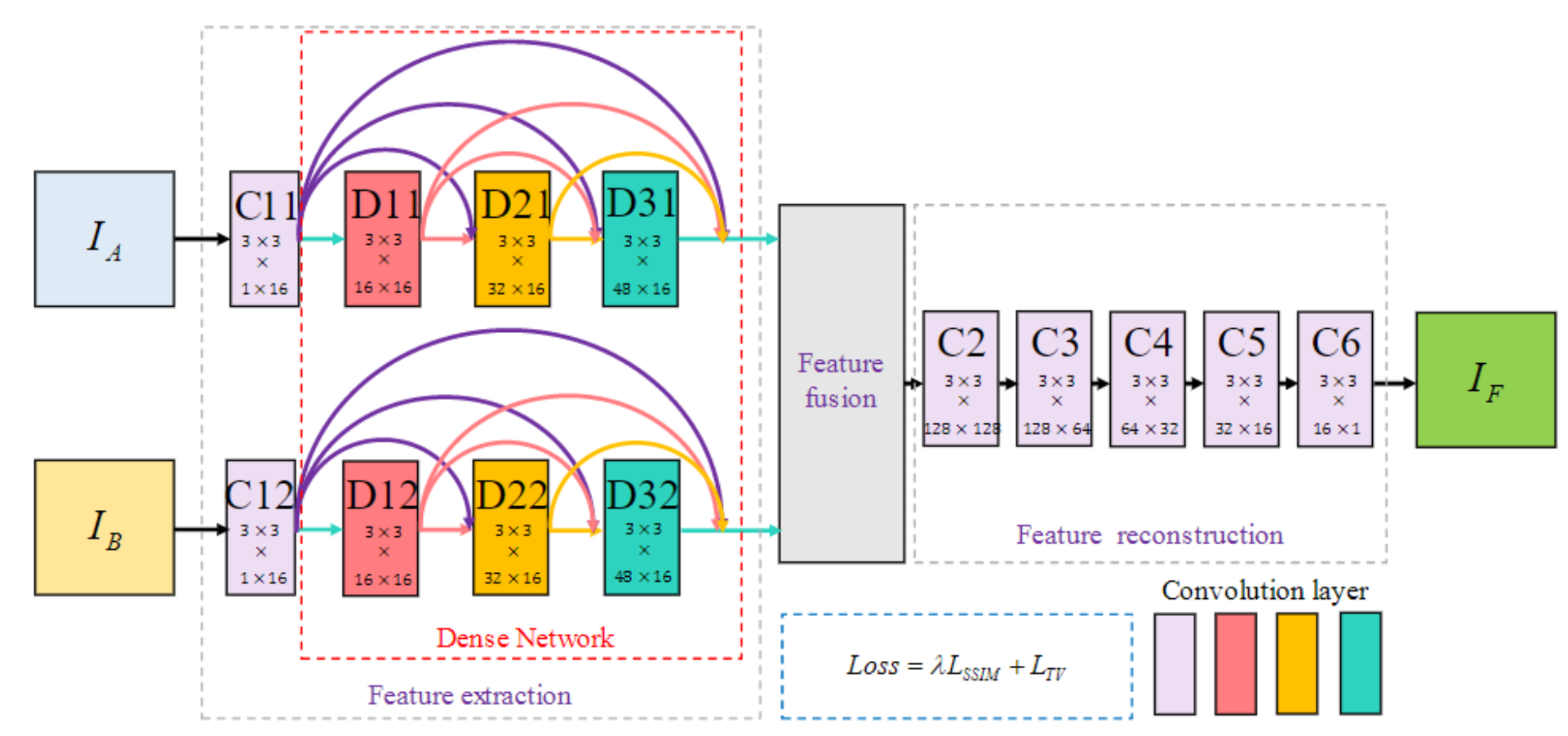
可见图像和红外图像分别表示为 I A I_A IA和 I B I_B IB,它们输入到双通道中。通道 A A A由 C 11 C11 C11和包含 D 11 D11 D11、 D 21 D21 D21和 D 31 D31 D31的block组成。通道 B B B由 C 12 C12 C12和一个包含 D 12 D12 D12, D 22 D22 D22和 D 32 D32 D32的block组成。第一层( C 11 C11 C11和 C 12 C12 C12)包含3×3的卷积以提取底层特征,每个 D D D中的三个卷积层也都是3×3的卷积。由于这两个通道共享相同的权重以提取相同类型的深度特征,因此此结构在降低计算复杂度方面也具有优势。在特征融合部分,作者尝试直接连接深层特征,也就是通道进行叠加。最后,特征融合层的结果通过另外五个卷积层( C 2 C2 C2, C 3 C3 C3, C 4 C4 C4, C 5 C5 C5和 C 6 C6 C6)来从融合特征中重建融合结果。下表概述了网络的更详细的体系结构:

从表格的结构可以看出,假设输出都是单通道的图像,经过前面的特征提取层,每一层的输出都会与后面所有层的输出直接相连,这里是通道叠加。这样,可见光通道会输出 16 + 16 + 16 + 16 = 64 16+16+16+16=64 16+16+16+16=64通道的特征图,两个网络通道会生成 128 128 128通道,在特征融合层进行通道叠加,输入特征重建的就是 128 128 128通道的特征图。
[M-SSIM+TV损失]
从上面的结构图可以看到,损失函数主要分为两部分 L S S I M L_{SSIM} LSSIM和 L T V L_{TV} LTV,作者设计的损失函数为:
L o s s = λ L S S I M + L T V Loss=λL_{SSIM}+L_{TV} Loss=λLSSIM+LTV
[SSIM]
[TV]
[VIF-Net的训练]
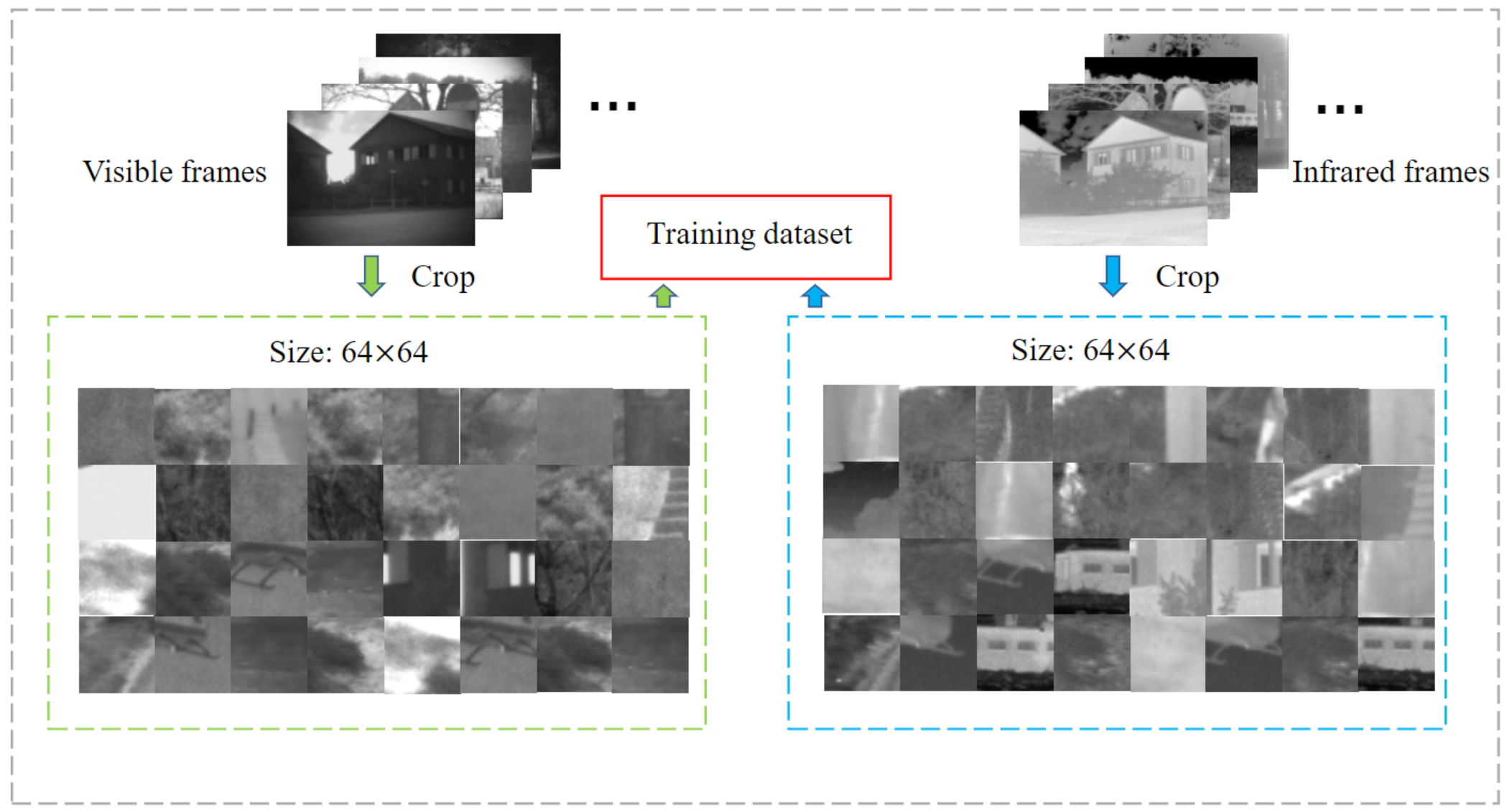
作者从公开可用的TNO图像数据集和INO视频数据集中收集了25对覆盖不同场景的可见和红外图像。 由于此数据集太小而无法满足训练要求,因此裁剪了约25000个尺寸为64×64的补丁,以扩展训练数据集而没有任何人工标签; 数据集的样本如下图所示。此外,作者将网络训练了50个epoch,使用Adam优化器以 1 0 − 4 10^{-4} 10−4的学习率将损失。 作者的网络是在TensorFlow上实现的,并在配备Intel E5 2670 2.6 GHz CPU,16 GB RAM和NVIDIA GTX1080Ti GPU的PC上进行了训练。
[结果分析]
[评价指标]
为了防止主观视觉的人为因素,作者使用物种可靠的量化指标:互信息/mutual information/ M I MI MI、边缘保持/edge retentiveness/ Q A B / F Q^{AB/F} QAB/F、相位一致性/phase congruency/ P C PC PC、非线性相关信息熵/nonlinear correlation information entropy/ Q N C I E Q^{NCIE} QNCIE、通用图像质量指数/universal image quality index/ U I Q I UIQI UIQI。
[ M I MI MI]
M I MI MI分数越高,表示从源图像获得的信息越丰富。公式如下: M I = ∑ i A ∈ I A F ∑ i ∈ I F p ( i A , i F ) log 2 p ( i A , i F ) p ( i A ) p ( i F ) + ∑ i B ∈ I B ∑ i F ∈ I F p ( i B , i F ) log 2 p ( i B , i F ) p ( i B ) p ( i F ) M I=\sum_{i_{A} \in I_{A_{F}}} \sum_{i \in I_{F}} p\left(i_{A}, i_{F}\right) \log _{2} \frac{p\left(i_{A}, i_{F}\right)}{p\left(i_{A}\right) p\left(i_{F}\right)}+\sum_{i_{B} \in I_{B}} \sum_{i_{F} \in I_{F}} p\left(i_{B}, i_{F}\right) \log _{2} \frac{p\left(i_{B}, i_{F}\right)}{p\left(i_{B}\right) p\left(i_{F}\right)} MI=iA∈IAF∑i∈IF∑p(iA,iF)log2p(iA)p(iF)p(iA,iF)+iB∈IB∑iF∈IF∑p(iB,iF)log2p(iB)p(iF)p(iB,iF)
其中 p ( i A , i F ) p(i_A,i_F) p(iA,iF)为 i A i_A iA与 i F i_F iF的联合概率分布, p ( i A ) p(i_A) p(iA)为 i A i_A iA的边缘概率分布。
[ Q A B / F Q^{AB/F} QAB/F]
Q A B / F Q^{AB/F} QAB/F测量了从原图像到融合图像转移的图像边缘数量。公式如下:
Q A B / F = ∑ i = 1 N ∑ j = 1 M ( Q A F ( i , j ) w A ( i , j ) + Q B F ( i , j ) w B ( i , j ) ) ∑ i N ∑ j M ( w A ( i , j ) + w B ( i , j ) ) Q^{AB/F}=\frac{\sum_{i=1}^{N} \sum_{j=1}^{M}\left(Q^{A F}(i, j) w^{A}(i, j)+Q^{B F}(i, j) w^{B}(i, j)\right)}{\sum_{i}^{N} \sum_{j}^{M}\left(w^{A}(i, j)+w^{B}(i, j)\right)} QAB/F=∑iN∑jM(wA(i,j)+wB(i,j))∑i=1N∑j=1M(QAF(i,j)wA(i,j)+QBF(i,j)wB(i,j))
这里比较难理解计算,简单来说,会通过边缘检测算法(Sobel边缘检测算法)计算出输入图像和融合图像的边缘信息,在通过上式得出指标,指标越高越好。具体的过程可以访问[多聚焦图像像素级融合方法研究-总第27页-论文页码第14页-⑥]
[ P C PC PC]
[ Q N C I E Q^{NCIE} QNCIE]
Q N C I E Q^{NCIE} QNCIE度量源图像和融合图像之间的非线性相关熵,定义如下:
Q N C I E = 1 + ∑ i = 1 3 λ i 3 log 256 ( λ i 3 ) Q^{N C I E}=1+\sum_{i=1}^{3} \frac{\lambda_{i}}{3} \log _{256}\left(\frac{\lambda_{i}}{3}\right) QNCIE=1+i=1∑33λilog256(3λi)
其中 λ i \lambda_{i} λi是非线性相关矩阵的特征值。
[ U I Q I UIQI UIQI]
另外, U I Q I UIQI UIQI是一种从相关损失,亮度和对比度三个方面来测量图像质量的评估指标。 定义如下:
U I Q I = [ 4 σ I , I F μ I μ I F ( σ I A 2 + σ I F 2 ) ( μ I A 2 + μ I F 2 ) + 4 σ I B I F μ I B μ I F ( σ I B 2 + σ I F 2 ) ( μ I B 2 + μ I F 2 ) ] 2 U I Q I=\frac{\left[\frac{4 \sigma_{I, I_{F}} \mu_{I} \mu_{I_{F}}}{\left(\sigma_{I_{A}}^{2}+\sigma_{I_{F}}^{2}\right)\left(\mu_{I_{A}}^{2}+\mu_{I_{F}}^{2}\right)}+\frac{4 \sigma_{I_{B} I_{F}} \mu_{I_{B}} \mu_{I_{F}}}{\left(\sigma_{I_{B}}^{2}+\sigma_{I_{F}}^{2}\right)\left(\mu_{I_{B}}^{2}+\mu_{I_{F}}^{2}\right)}\right]}{2} UIQI=2[(σIA2+σIF2)(μIA2+μIF2)4σI,IFμIμIF+(σIB2+σIF2)(μIB2+μIF2)4σIBIFμIBμIF]
其中 μ μ μ和 σ σ σ分别表示平均值和标准偏差, σ I A I F σ_{I_AI_F} σIAIF是 I A I_A IA和 I F I_F IF之间的互相关。
[不同方法之间的对比实验]
下面三个表格展示了三种图像(“Human”、“Street”、“Kaptein”)的测试结果。可以看出VIF-Net取得不错的性能。
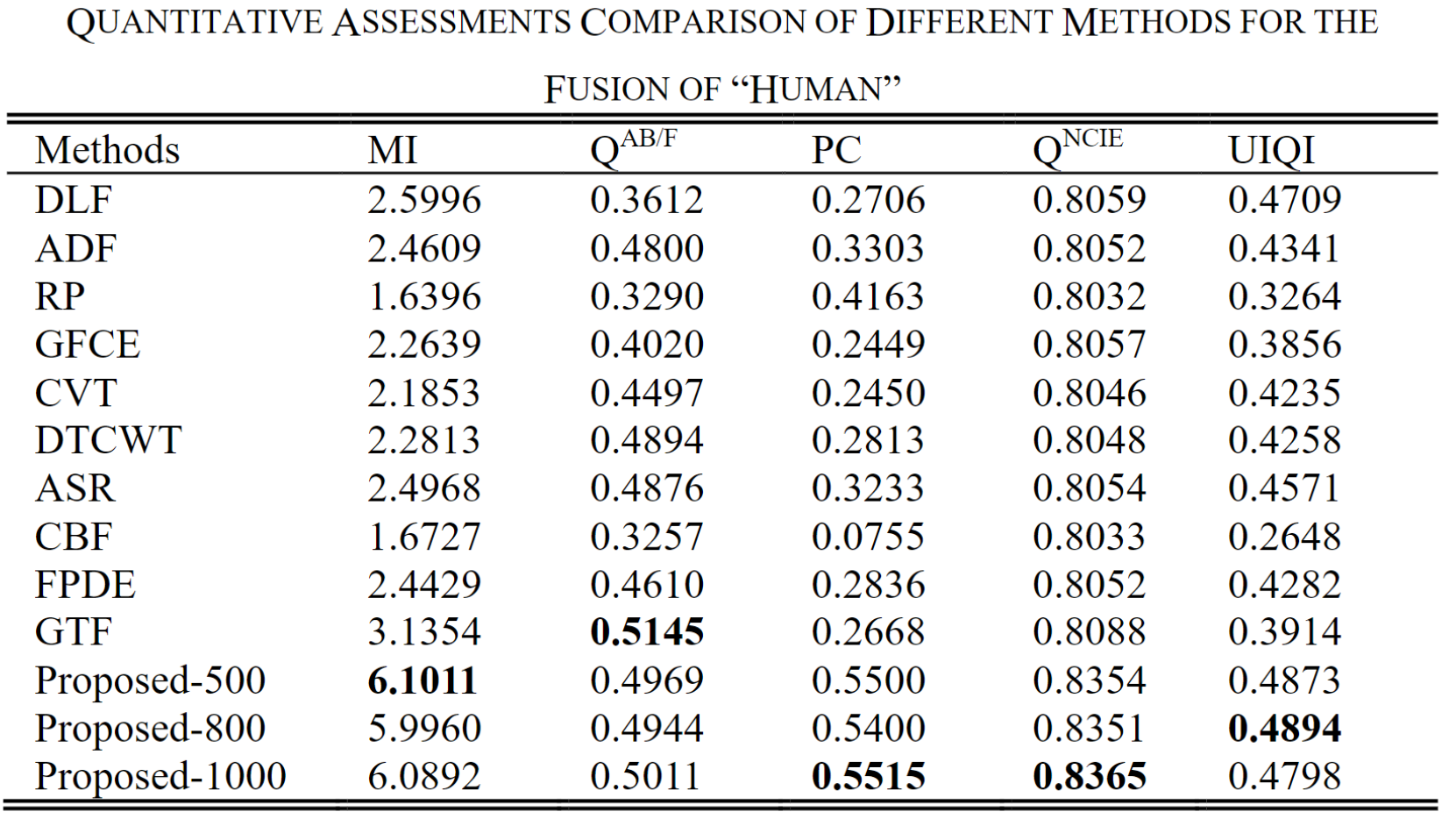
其中作者对损失函数的超参数的取值进行对比,Proposed-500/800/1000分别对应 λ = 500 / 800 / 1000 \lambda =500/800/1000 λ=500/800/1000也就是下式:
L o s s = λ L S S I M + L T V Loss=λL_{SSIM}+L_{TV} Loss=λLSSIM+LTV
下图是三种图像的展示(自上向下是“Human”、“Street”、“Kaptein”),红色框是一些关键特征,可以看出效果很好:
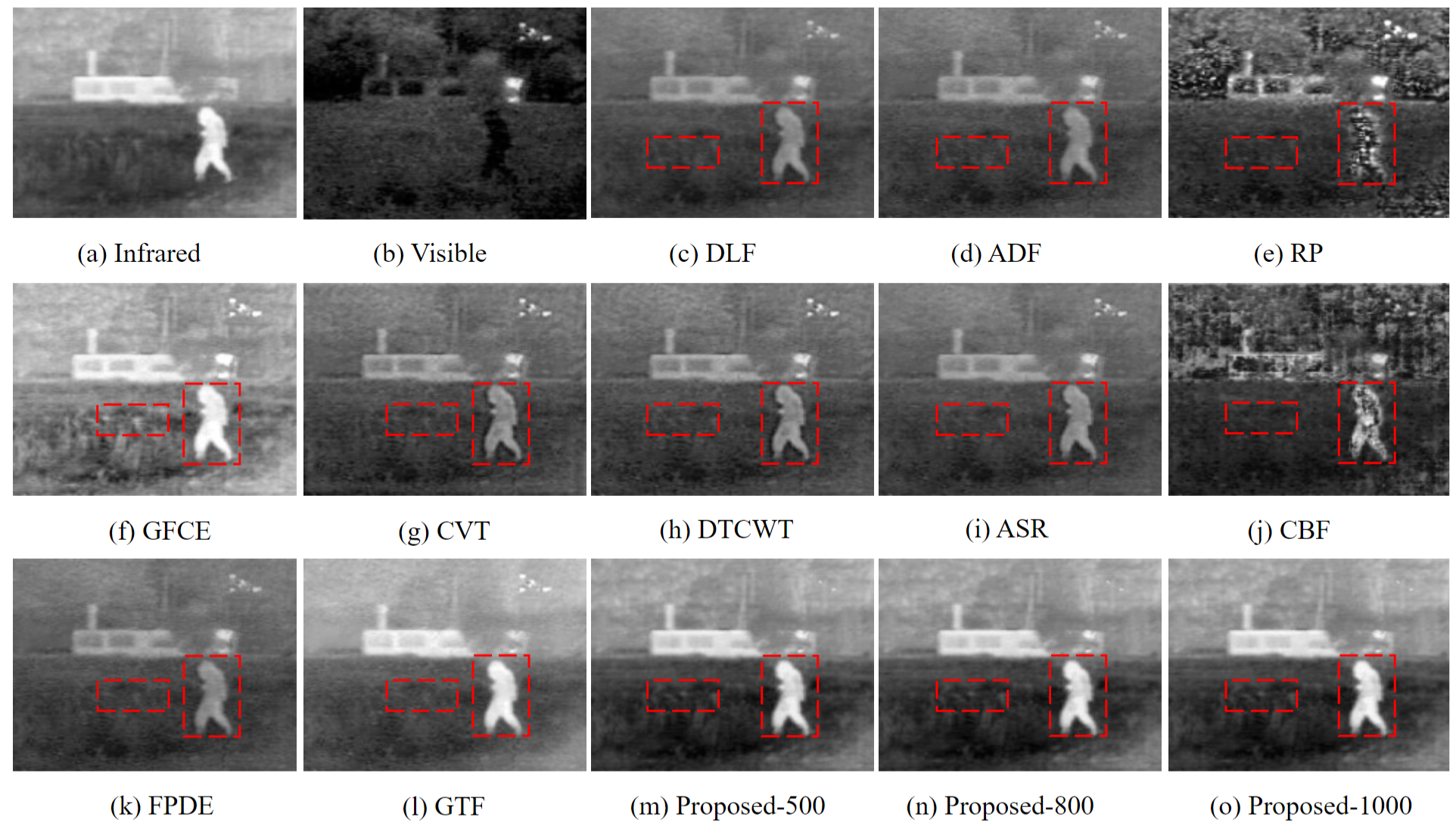
从上图中可以看到,由于大量的人工噪声,RP和CBF的结果具有较差的视觉效果。 此外,DLF,ADF,CVT,DTCWT,ASR,FPDE的结果看起来非常相似,并且会产生伪像,目标尚不清楚。 此外,GFCE和GTF包含明亮而显眼的目标,但是基于GFCE的融合图像的背景由于细节和亮度的增强而失真。 由于GTF可以平滑纹理,因此可见的细节和边缘会在一定程度上丢失。作者的方法会突出显示红外目标并保留纹理细节,从而在这些方法中提供最佳的融合性能。
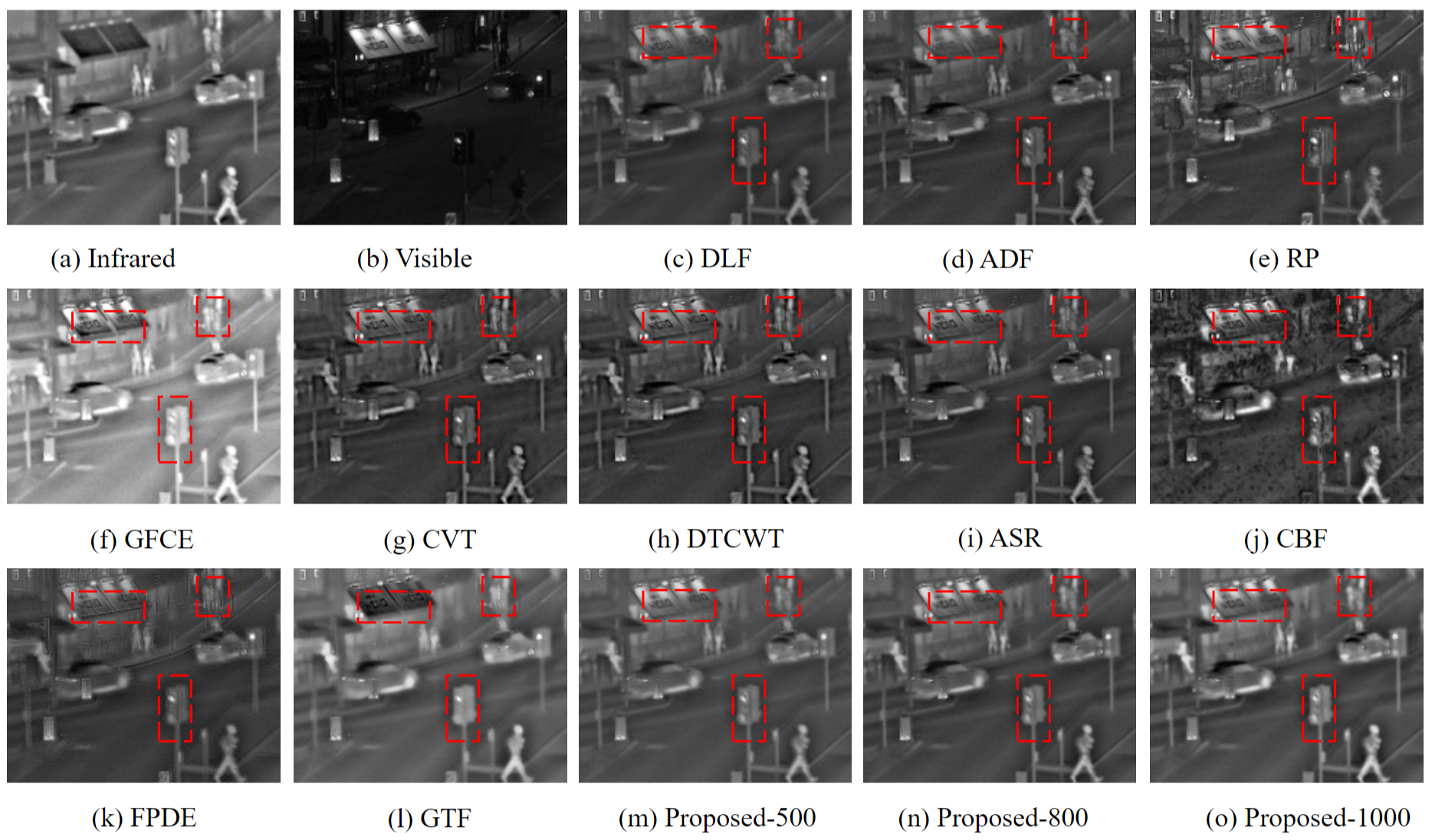
上图示出了“Street”的融合结果。 主要目标是将行人和路灯之类的信息融合到单个图像中,并尽可能保留车辆等环境信息。 更具体地说,作者所提出的方法的结果完全保留了信号灯,板上的字母和行人信息。 相反,GTF的结果会丢失大部分可见的细节,如标记区域所示。 DLF,ADF和FPDE的结果分辨率低,CVT,DTCWT和ASR将伪边缘引入融合图像,并且由于GFCE过度增强,融合结果中出现了伪影和失真。

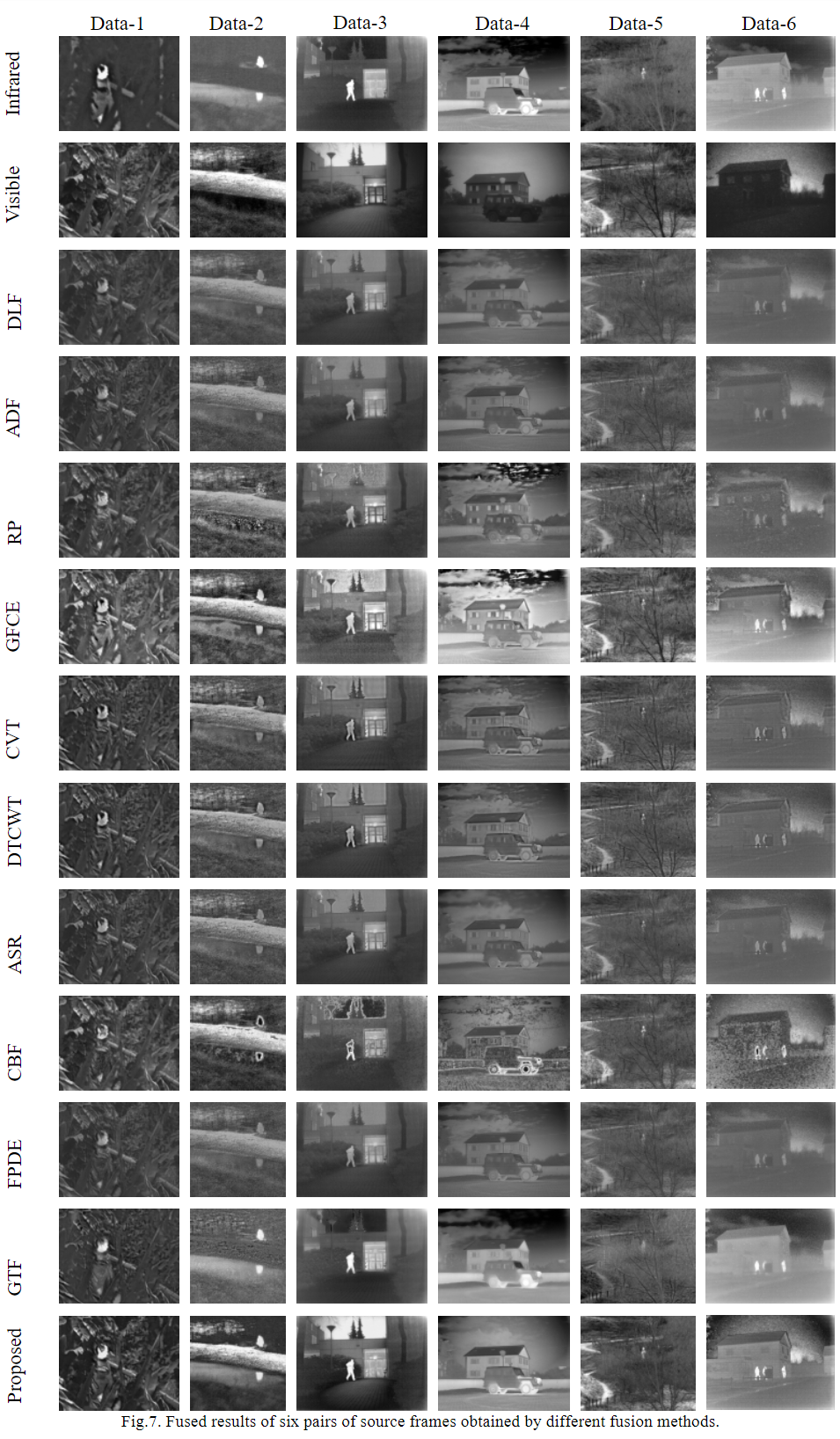
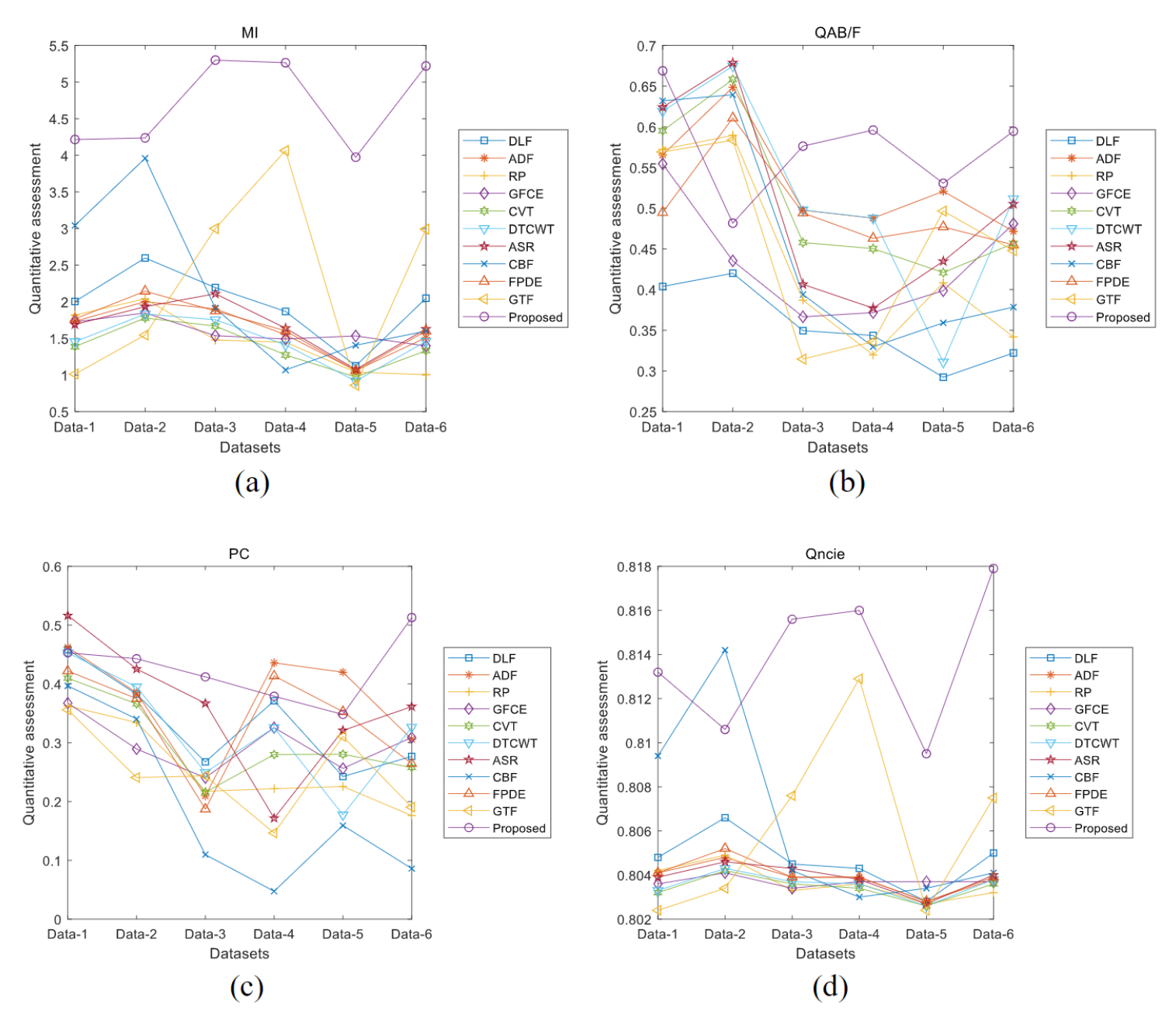
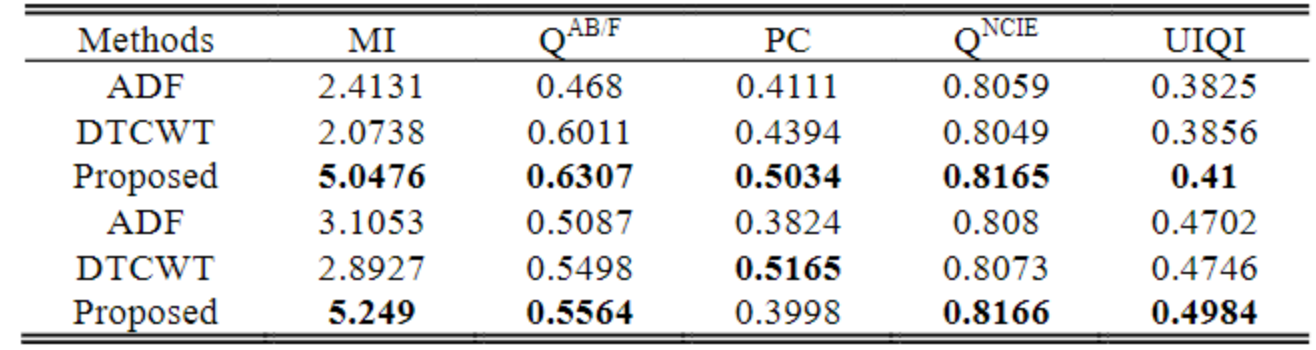
其他数据上的结果在定量上的对比如下图所示, M I MI MI指标比其他比较方法的 M I MI MI指标高得多,而其余的指标通常要好于其他比较方法:
[不同λ之间的对比实验]
首先作者选取 λ = 50 / 500 / 5000 \lambda =50/500/5000 λ=50/500/5000得到下图结果:
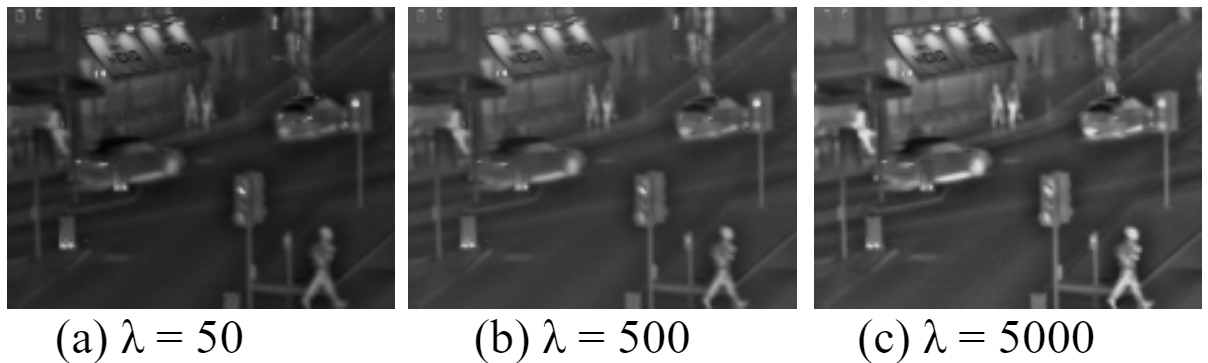
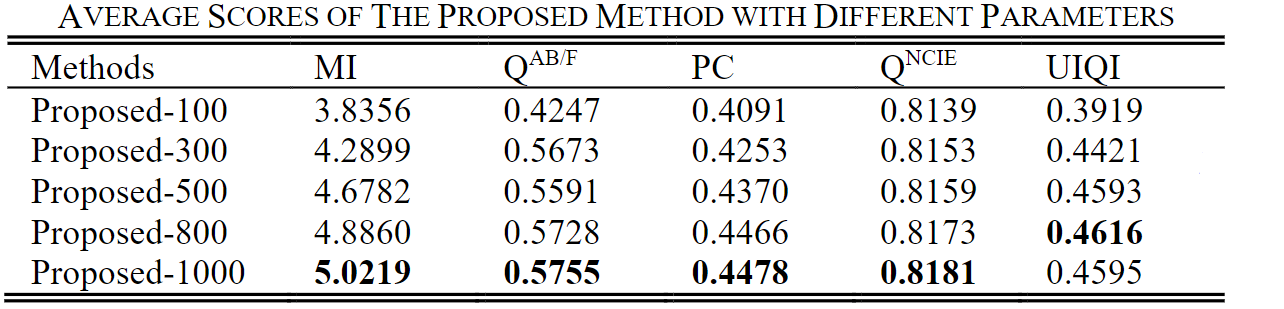
从实验结果来看,当 λ = 500 λ= 500 λ=500和 λ = 5000 λ= 5000 λ=5000时,融合结果差异不大,但后者丢失了一些纹理细节。 直观地,为了进一步突出红外目标,作者假设最佳 λ λ λ将略大于500。为估计VIF-Net的性能,将 λ λ λ的平均得分参数 λ λ λ设置为100、300、500、800和1,000。 提议的方法列于下表。
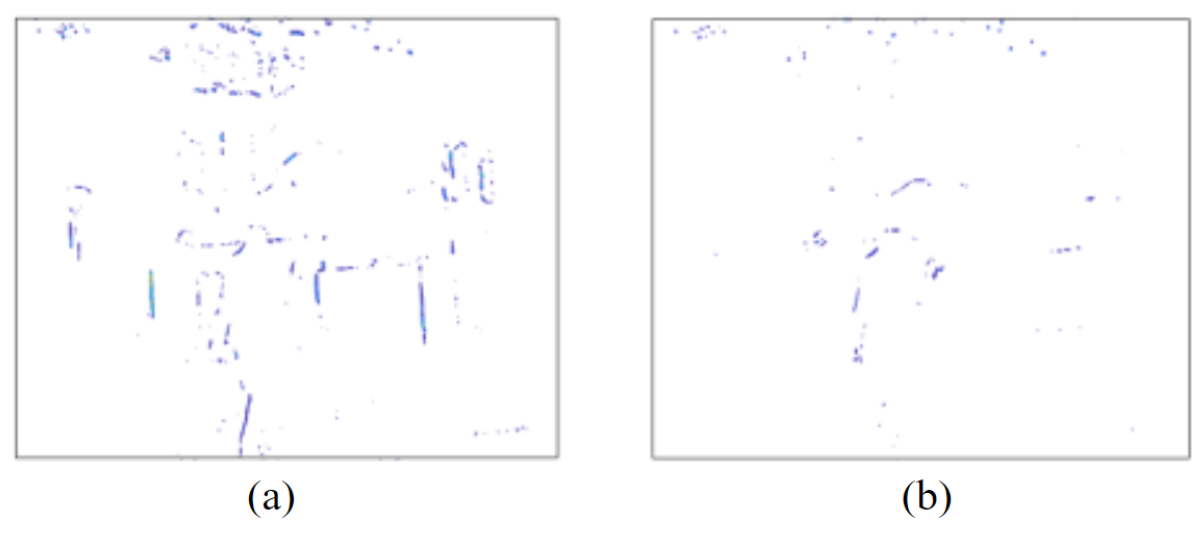
通过进一步分析,使用”Kaptein”对典型图像来证明VIF-Net的通用适应性,如下图所示。以”Kaptein”图中的结果为例,执行减法运算以方便观察差异。如下图所示,在视觉评估水平上的差异可以忽略不计。
作者认为可以在λ= 1000时获得最佳融合结果,以下结果均是采用此参数。
[推理时间对比]
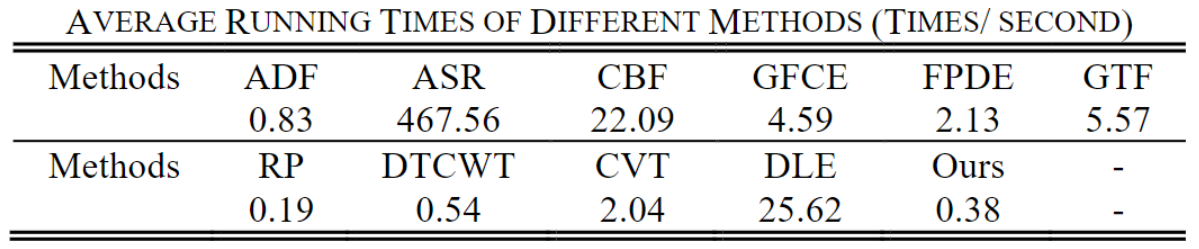
其他方法(包括DLF,CBF,GTF,GFCE,CVT,DTCWT和FPDE)包含优化算法或复杂的比例转换,并且需要大量迭代,因此平均运行时间较长。 相比之下,由于降维算法和结构简单,ADF和RP的计算复杂度较低。 总体而言,由于VIF-Net具有简单的网络结构和较高的运行效率,因此在实时视频融合中也很有效,下表展示运行一次所用的平均时间:
[扩展实验-视频融合]
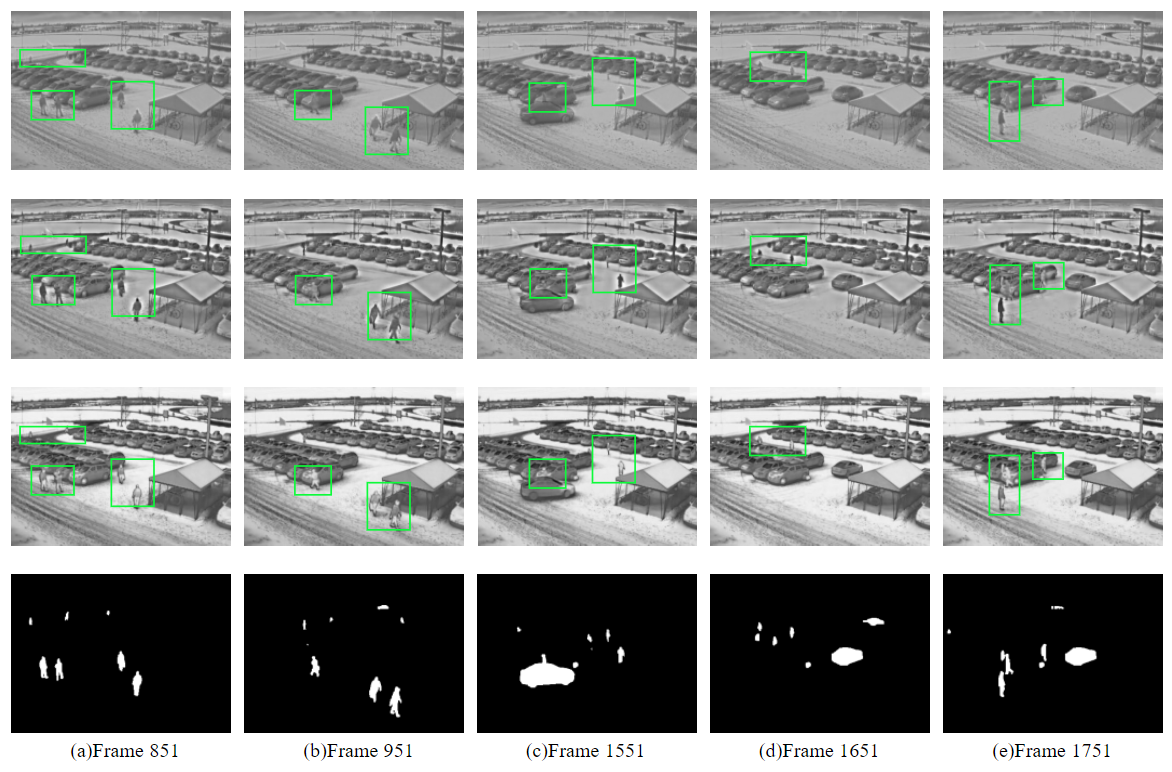
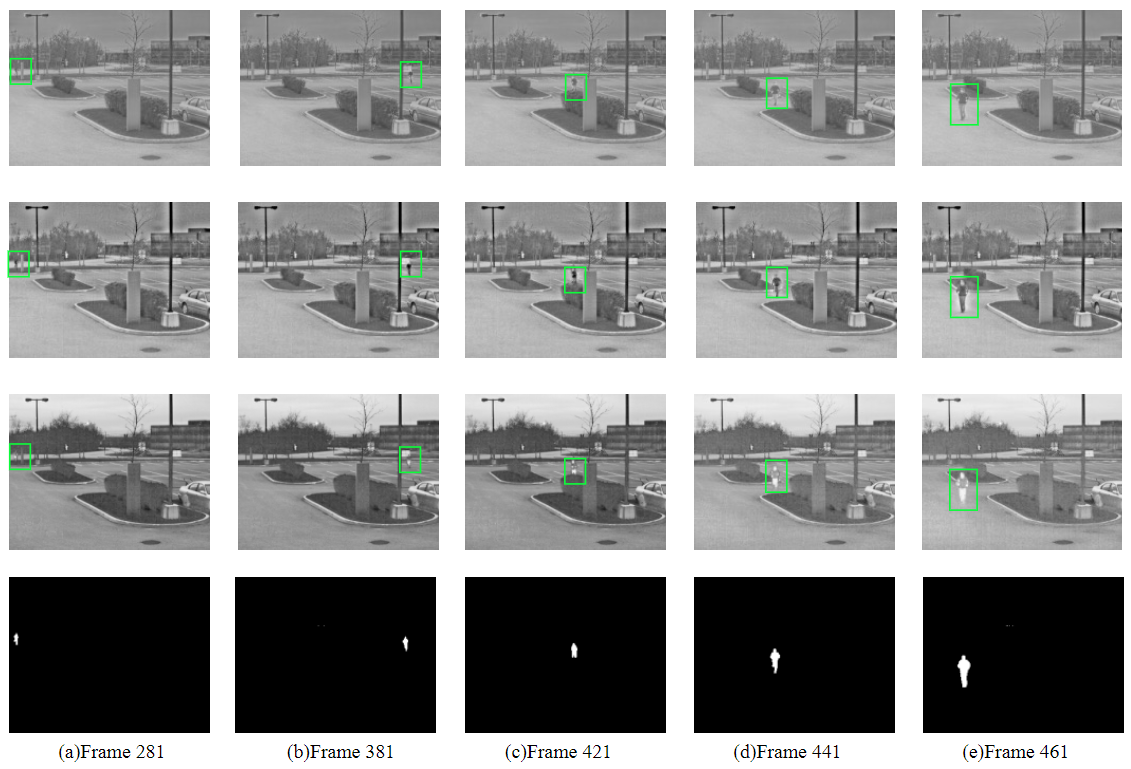
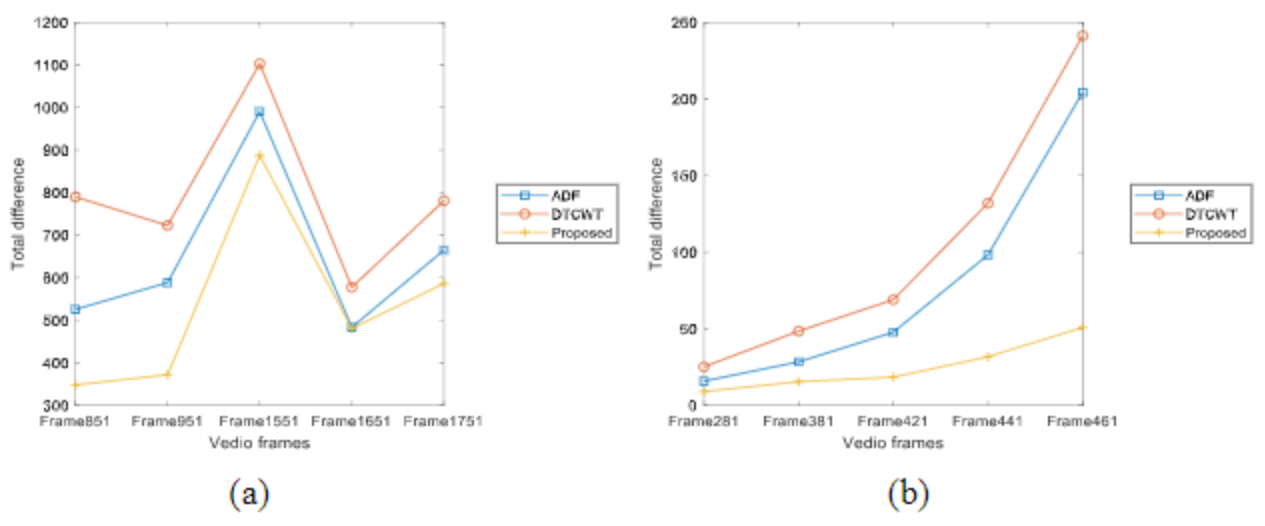
作者认为视频中移动的物体都是在红外图像比较明显的物体。将融合后的图像与红外图像中的移动物体抠出来,利用每一帧的Groundtruth,抠出来的图像相互做差,取绝对值。差值越小说明融合图融合红外图像效果更好。下图展示了三种方法在第一组视频(左)和第二组视频(右)上的差值对比。
?传送门
◉ ?RGB??红外
?数据集
[TNO-RGB红外图像]
[FLIR-RGB红外图像]
[Multispectral Image Recognition-RGB红外目标检测]
[Multispectral Image Recognition-RGB红外语义分割]
[INO-RGB红外视频]
[SYSU-MM01行人重识别可见光红外数据]
?论文
[VIF-Net:RGB和红外图像融合的无监督框架]
[SiamFT:通过完全卷积孪生网络进行的RGB红外融合跟踪方法]
[TU-Net/TDeepLab:基于RGB和红外的地形分类]
[RTFNet:用于城市场景语义分割的RGB和红外融合网络]
[DenseFuse:红外和可见图像的融合方法]
[MAPAN:基于自适应行人对准的可见红外跨模态行人重识别网络]
◉ ?多光谱??高光谱
?数据集
[高光谱图像数据]
?论文
[Deep Attention Network:基于深层注意力网络的高光谱与多光谱图像融合]
◉ ?RGB??SAR
?数据集
[待更新]
?论文
[待更新]
◉ ?RGB??红外??SAR
?数据集
[待更新]
?论文
[待更新]
?大家有数据融合方向的优秀论文可以在评论分享一下,感谢。?
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/232322.html原文链接:https://javaforall.net


