
写在最前面:大多数情况下,我们学习线性代数的目的是求解线性方程组Ax=b,而不是为了求A的逆。单就解方程而言,LU分解是最实用的算法,很少会去求逆,求逆可以说是下下策。


感兴趣的朋友可以参考这篇文章:
1,待定系数法


2,高斯消元法
已知矩阵A和对应维度的单位矩阵I,先写出增广矩阵A|I,然后对A进行高斯消元,在对A消元的同时,单位矩阵I也在变,直到把A消成单位矩阵,A旁边的单位矩阵也会随之变成A的逆矩阵。

3,用LU分解求矩阵的逆
跟我们平时用LU分解的结果来解方程不同的是,以往,我们面对的是Ax=b(x和b都是和A同维度的列向量),当我们已经求得了A的LU分解以后,我们会按照先求Ly=b,得到y,再求Ux=y的步骤,得到最终的x。如果,我们使用的是PA=LU的分解,则是先求Ly=Pb,再求Ux=y。而这里,我们面对的是AX=I(X和I都是和A同维度的矩阵,且X就是A-1)。因此,我这里的做法是把单位矩阵中的每一列,都看成是Ax=b中的一个b,同时,也把“未知矩阵”A-1中的每一列看成是Ax=b中的x。
实际上,我的这个做法也是符合矩阵与矩阵的乘法的意义的,例如AB=C,则,C中的每一列,实际上都是B中的对应列,对A中所有列的线性组合的结果。B的对应列中的每一个元素就是线性组合的权重。


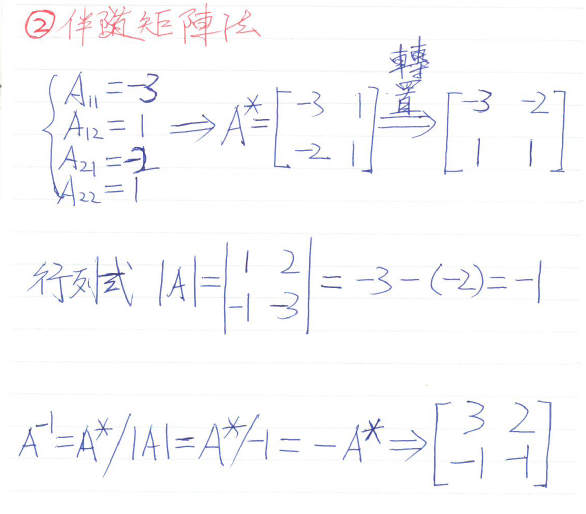
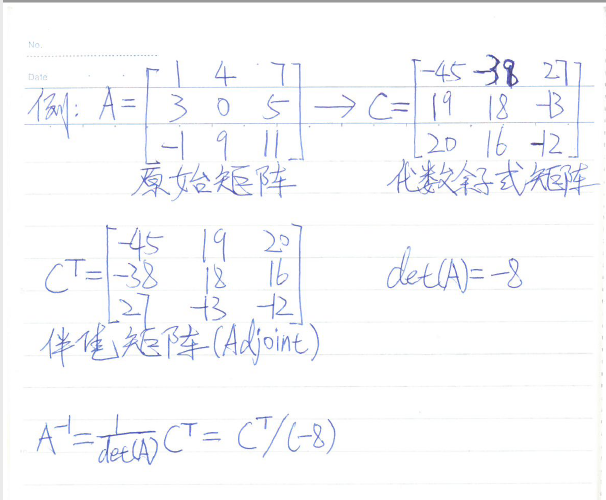
4,伴随矩阵+代数余子式
前面的四个矩阵求逆方法都是针对2×2矩阵而言的,下面补充一些3×3矩阵上应用。
伴随矩阵法的补充1:


伴随矩阵法的补充2:

伴随矩阵法的补充3:




(全文完)
作者 — 松下J27
本文于2022年5月26日晚,对LU分解的笔记部分增加了文字补充。
人生格言:忠于自己的内心,比不负众望更重要!
参考文献:
用余子式、代数余子式和伴随来求逆矩阵![]() https://www.shuxuele.com/algebra/matrix-inverse-minors-cofactors-adjugate.html
https://www.shuxuele.com/algebra/matrix-inverse-minors-cofactors-adjugate.html

(配图与本文无关)
版权声明:所有的笔记,可能来自很多不同的网站和说明,在此没法一一列出,如有侵权,请告知,立即删除。欢迎大家转载,但是,如果有人引用或者COPY我的文章,必须在你的文章中注明你所使用的图片或者文字来自于我的文章,否则,侵权必究。 —-松下J27
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/233099.html原文链接:https://javaforall.net


