
准备好几台机器,最好准备至少2台机器
我这里准备了3台机器,一台做master,2台做node
1.机器基本设置
1.1 设置主机名
hostnamectl set-hostname master #在master机器上执行
hostnamectl set-hostname node1 #在node1机器上执行
hostnamectl set-hostname node2 #在node2机器上执行
1.2 设置三台机器时区,保证后续事件准确,如果每台机器的时间不一样,后续出现很多莫名其妙的问题
timedatectl set-timezone Asia/Shanghai #在三台上都执行
1.3 添加主机至hosts文件
vim /etc/hosts #三台机器都执行
#在打开的文件添加三行内容,内容为机器ip+名称,本文直接以master+node命名,实际可按照需求更改
#192.168.1.181 matser
#192.168.1.182 node1
#192.168.1.183 node2
1.4 关闭swap分区,很重要,swap分区不关闭,会直接导致部署失败,三台全部需要执行
swapoff -a
vim /etc/fstab #将swap所在行注释掉
1.5 修改iptables信息
echo 1 > /proc/sys/net/bridge/bridge-nf-call-iptables
echo 1 > /proc/sys/net/bridge/bridge-nf-call-ip6tables
关闭所有节点的seliux以及firewalld
sed -i 's/SELINUX=enforcing/SELINUX=disabled/g' /etc/selinux/config
setenforce 0
systemctl disable firewalld
systemctl stop firewalld
2.安装docker
因为本次要部署的K8S版本为1.10.1版本,版本较低,所以docker版本不要安装太高的版本(亲测19.03版本不兼容)
yum install docker -y
systemctl start docker && systemctl enable docker
默认安装的是1.13版本(目前最新版本是1.13版本),不要安装docker-ce,docker-ce会安装19.03版本(截止目前的最新版本)
查看docker cgroup
docker info
1.10.1版本的K8S使用的是cgroup driver,1.14之后的版本才推荐使用systemd,docker与K8S两者必须要保持一致,否则会报错
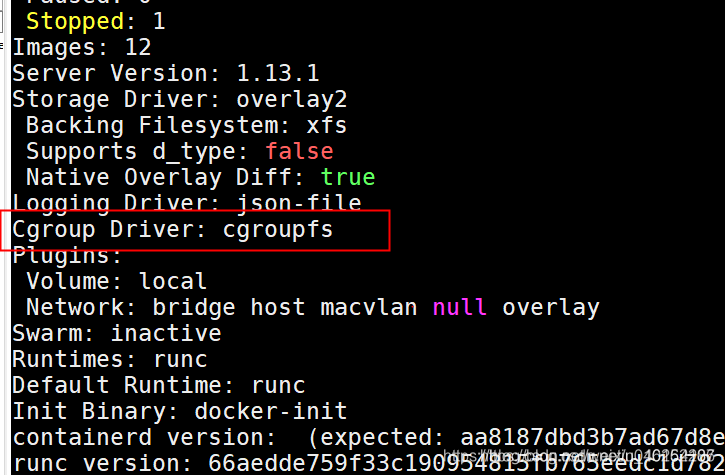

如果查看到的cgroup不为cgroupfs,需要修改
vim /usr/lib/systemd/system/docker.service
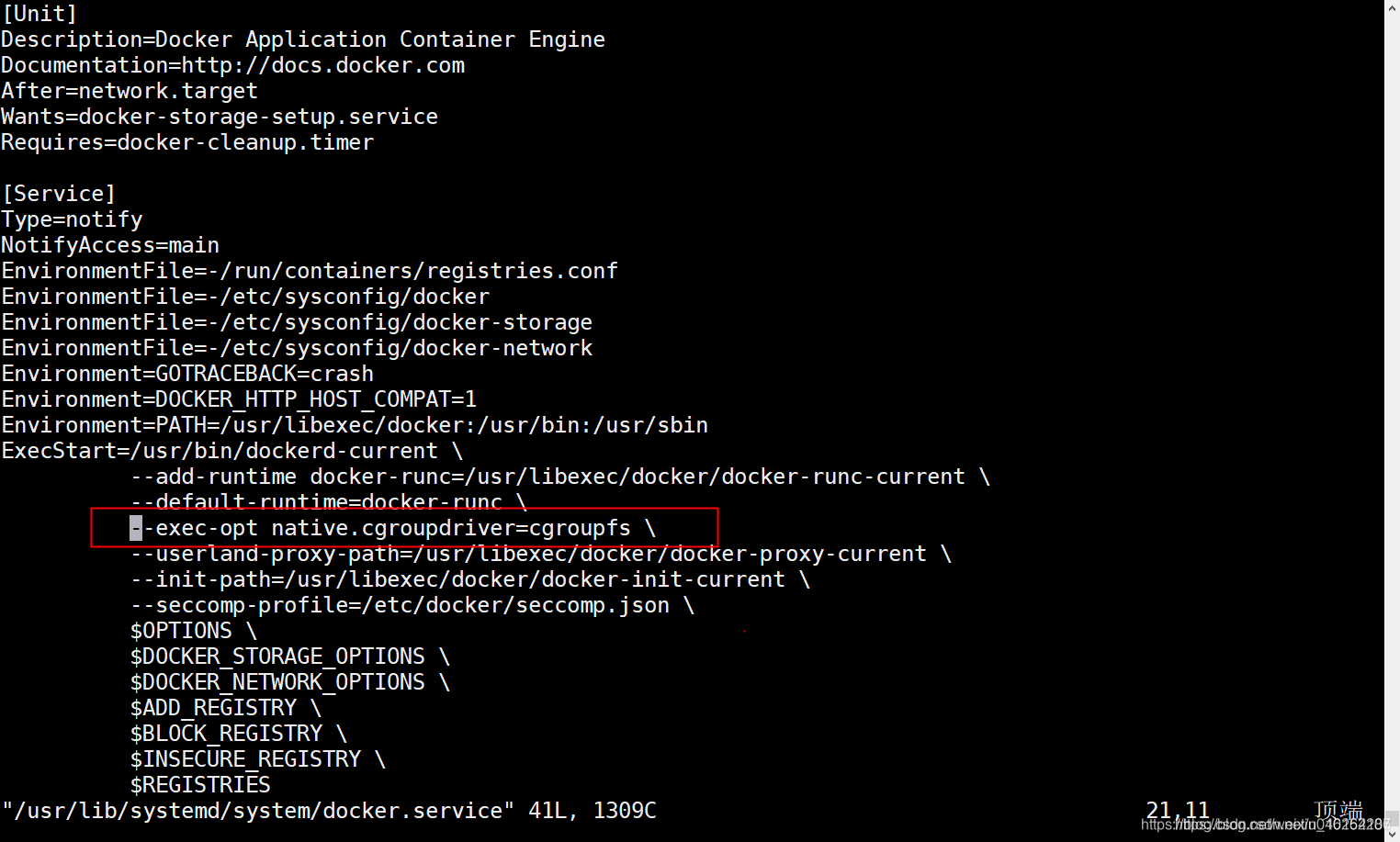
修改完成后重载配置,重启docker
systemctl daemon-reload && systemctl restart docker
3.安装kubeadm,kubectl,kubelet
3.1 下载必要离线包,因为不下载的话,后面在初始化kubeadm时,会去自动拉去必要镜像,有些镜像需要翻墙才能下得下来
链接:https://pan.baidu.com/s/1tPGxcqUkepbGnVV934bOpQ
提取码:r0cz
复制这段内容后打开百度网盘手机App,操作更方便哦
3.2 安装,此步骤三天机器全部都需要执行
注:本文将所有K8S的文件放置在/home/k8s目录下,以下代码在使用时记得修改为实际路径
cd /home/k8s/kubernetes-1.10
tar -xvf kube-packages-1.10.1.tar
cd kube-packages-1.10.1
rpm -Uvh * --force --nodeps
在所有kubernetes节点上设置kubelet使用cgroupfs,与dockerd保持一致,否则kubelet会启动报错
默认kubelet使用的cgroup-driver=systemd
sed -i "s/cgroup-driver=systemd/cgroup-driver=cgroupfs/g" /etc/systemd/system/kubelet.service.d/10-kubeadm.conf
systemctl daemon-reload && systemctl restart kubelet
3.3 导入镜像,只导入了必要镜像,后续镜像很多的话,可以考虑搭建harbor存放镜像,此步骤三天机器全部都需要执行
docker load -i k8s-images-1.10.tar.gz
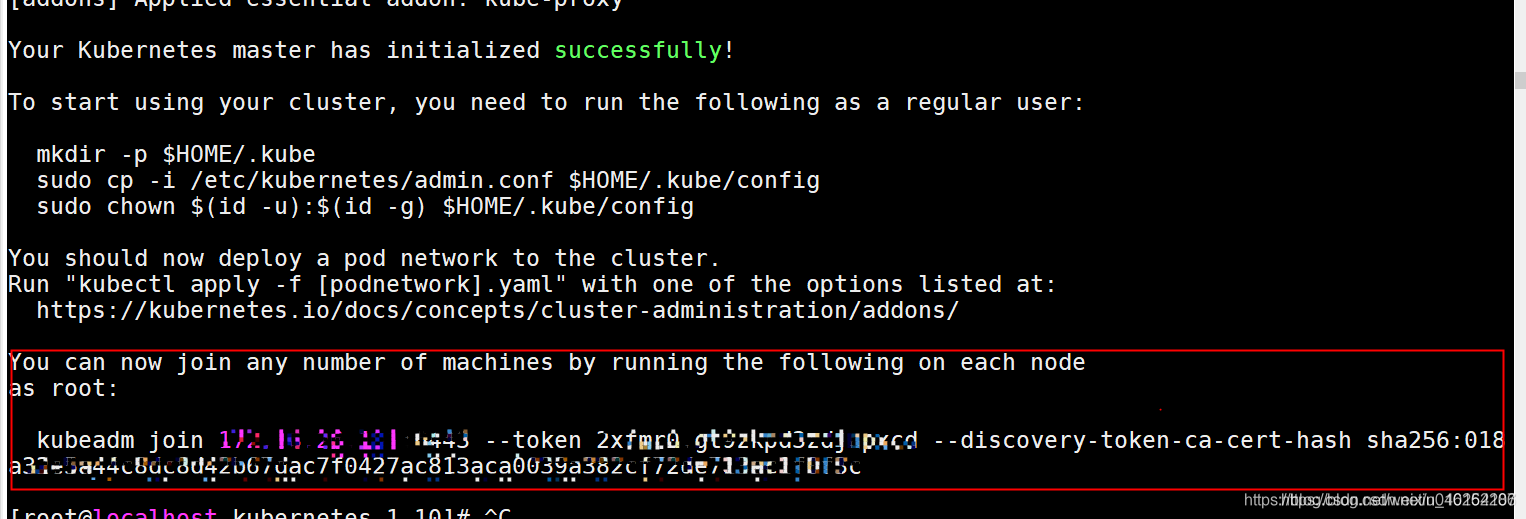
3.4 初始化master节点,此步骤只需要在master机器上执行
kubeadm init --kubernetes-version=v1.10.1 --pod-network-cidr=10.244.0.0/16
#初始化需要执行部署的版本,和ip段
初始化成功之后,记得记录一下join的加入命令,在node节点上执行该命令即可将node机器添加到master节点中
3.5 执行初始后成功后的提示命令
mkdir -p $HOME/.kube
sudo cp -i /etc/kubernetes/admin.conf $HOME/.kube/config
sudo chown $(id -u):$(id -g) $HOME/.kube/config
3.6 查看当前部署情况
kubectl get node
可以看到此时只有一个master节点,且状态为notready状态

这是因为还未部署网络插件,K8S可以采用多种网络方式,例如flannel,calico,openvswitch
本文采用flannel网络
3.7 部署flannel
cd /home/k8s/kubernetes-1.10
kubectl apply -f kube-flannel.yml #配置文件可修改,本文直接使用默认配置
配置完成后等待一会儿,再次查看node状态
kubectl get node
可以看到状态变成正常

3.8 将node节点加入到master机器
直接复制master节点初始化后的命令(无需任何修改,直接复制执行),即可将node节点加入到master机器中
加入之后一会儿,可以看到2台node机器

4.到此步,集群部署完成
5.dashboard部署
直接使用离线包中的三个.yaml文件即可完成部署
cd /home/k8s/kubernetes-1.10
kubectl apply -f kubernetes-dashboard-http.yaml -f admin-role.yaml -f kubernetes-dashboard-admin.rbac.yaml
完成后查看主机是否起了31000端口,如果已启动,可通过ip:31000打开 K8S可视化页面
6.master节点初始化失败,需要清理重新部署
#重置kubernetes服务,重置网络,删除网络配置
kubeadm reset
systemctl stop kubelet
systemctl stop docker
rm -rf /var/lib/cni/
rm -rf /var/lib/kubelet/* rm -rf /etc/cni/ ifconfig cni0 down ifconfig flannel.1 down ifconfig docker0 down ip link delete cni0 ip link delete flannel.1 systemctl start docker tab快捷键安装
yum -y install bash-completion && source /usr/share/bash-completion/bash_completion && source <(kubectl completion bash) && echo "source <(kubectl completion bash)" >> ~/.bashrc
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/101899.html原文链接:https://javaforall.net


