
大家好,又见面了,我是全栈君。

Do you have an init(); in your SiteController?
If so you need to call parent::init();
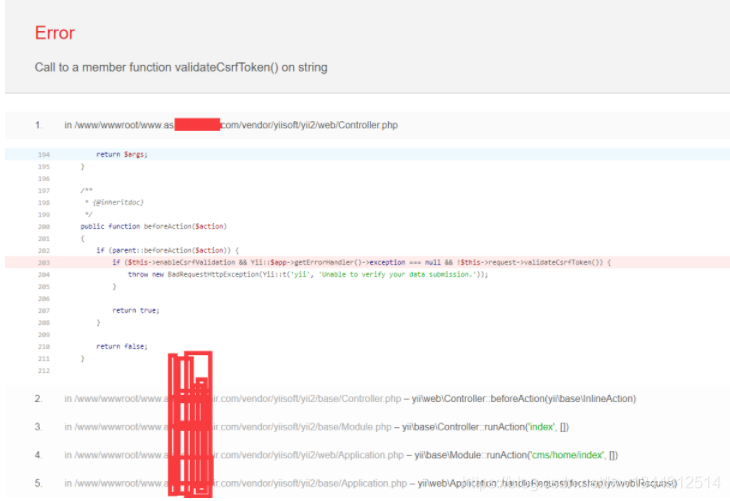
错误已经定位,这个是yii2更新导致的问题:https://github.com/yiisoft/yii2/blob/master/framework/base/Controller.php#L105
yii2加入类变量 $request , 在init函数中初始化,因此如果重写controller的init方法,必须执行 parent:init(); , 否则就会出这个报错,而fecmall的有一些controller重新init方法,但是没有执行 parent:init;导致的controller 中的$this->request没有初始化导致的问题。
参考:http://www.fecmall.com/topic/4317 https://github.com/yiisoft/yii2/issues/18154
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/111579.html原文链接:https://javaforall.net

![ie 谷歌插件Chrome Frame[通俗易懂]](https://javaforall.net/wp-content/uploads/2020/11/2020110817443450-480x300.jpg)
