
大家好,又见面了,我是你们的朋友全栈君。
Linux被kdevtmpfsi挖矿病毒入侵
一. 错误信息
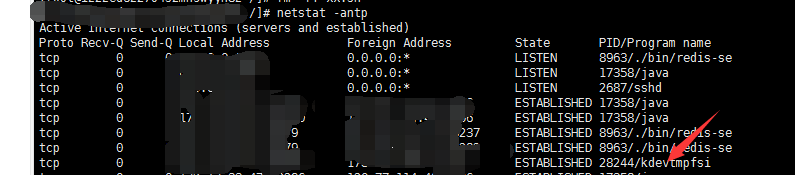
先上阿里云上的报警信息。有个最大的问题是:top命令查看自己服务器CPU运行情况,会发现kdevtmpfsi的进程,CPU使用率为100%,第一次删除干净了kdevtmpfsi程序,没曾想几分钟以后,就出现了第二个警告。使用netstat -antp命令查看端口使用情况,又出现了kdevtmpfsi如图三所示
netstat -antp



二.解决问题
一般出现kdevtmpfsi病毒都会伴有定时任务,就会出现我上面说的处理一次后,又会继续出现,反反复复处理不干净。
1.首先停掉kdevtmpfsi的程序
ps aux
找到kdevtmpfsi的进程

删除掉与kdevtmpfsi相关的进程
kill -9 20267
kill -9 20367
2.删除Linux下的异常定时任务
crontab -l 查看定时任务
crontab -r 表示删除用户的定时任务,当执行此命令后,所有用户下面的定时任务会被删除
如下图所示
3.结束kdevtmpfsi进程及端口占用
netstat -antp
找到kdevtmpfsi端口 我这里是28244 一中第三张图可以看到。不要直接杀掉,因为有守护线程还会重启。
ps -aux | grep kinsing
ps -aux | grep kdevtmpfsi

kill -9 28244
kill -9 28829
4.删除掉kdevtmpfsi的相关文件
cd /tmp
ls
rm -rf kdevtmpfsi
rm -rf /var/tmp/kinsing
最后自己可以再检查一下是否还有kdevtmpfsi的相关文件,有的话就继续删除
find / -name kdevtmpfsi
find / -name kinsing
三.怎么预防处理这个病毒
最根本的原因是自己的redis 6379配置不当导致的。大家可以参考阿里云的Redis服务安全加固
阿里Redis服务安全加固
您的点赞,是我更新的动力!
如有错误,还望指正
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/138680.html原文链接:https://javaforall.net


