
大家好,又见面了,我是你们的朋友全栈君。
第一次
以前总是看别人写的博客,通过别人的博客解决了我很多问题,从中也学到了各种知识,虽然不是很系统,但也比较有针对性。所以本次我将我这两天做的东西写成了博客,毕竟水平有限还需学习,所以此文仅供参考,但倘若能帮助到别人解决某些问题,明白某些知识那我将甚感欣慰。
这是我第一次写博客,难免有很多不足之处,如有意见敬请发表评论 甚是感谢!
功能实现目标
- 控制电机停止与启动。
- 控制电机正反转。
- 控制电机旋转速度。
- 能按一定角度进行步进。
硬件简介
本次采用的就是最最最简单的51单片机(不要问我后面程序为什么是reg52.h,问一次打一次)没有外接任何外围器件(除了按键)。只是单纯的控制I/O口,关于单片机的硬件结构就不讲了(其实我也不懂,只会控制下I/O口)。
TB6600驱动器怎么说呢,我觉的它最大的优势就是性价比吧,几十块钱就可以买一个,而且也能实现要求不是很高的实验,对于学生党来说再合适不过了。输出电流和细分都可以通过拨片按需选择,最高细分可达1/32。电源:要求9-42V直流开关电源。电流的话自己看你的电机功率选择就行。
————-此处省略一万字————-其他的我就不讲了自行百度下使用手册就行了,相信读懂这种简单的使用手册就不在话下了。
硬件连接
—-先说说驱动器和电机的连接—-
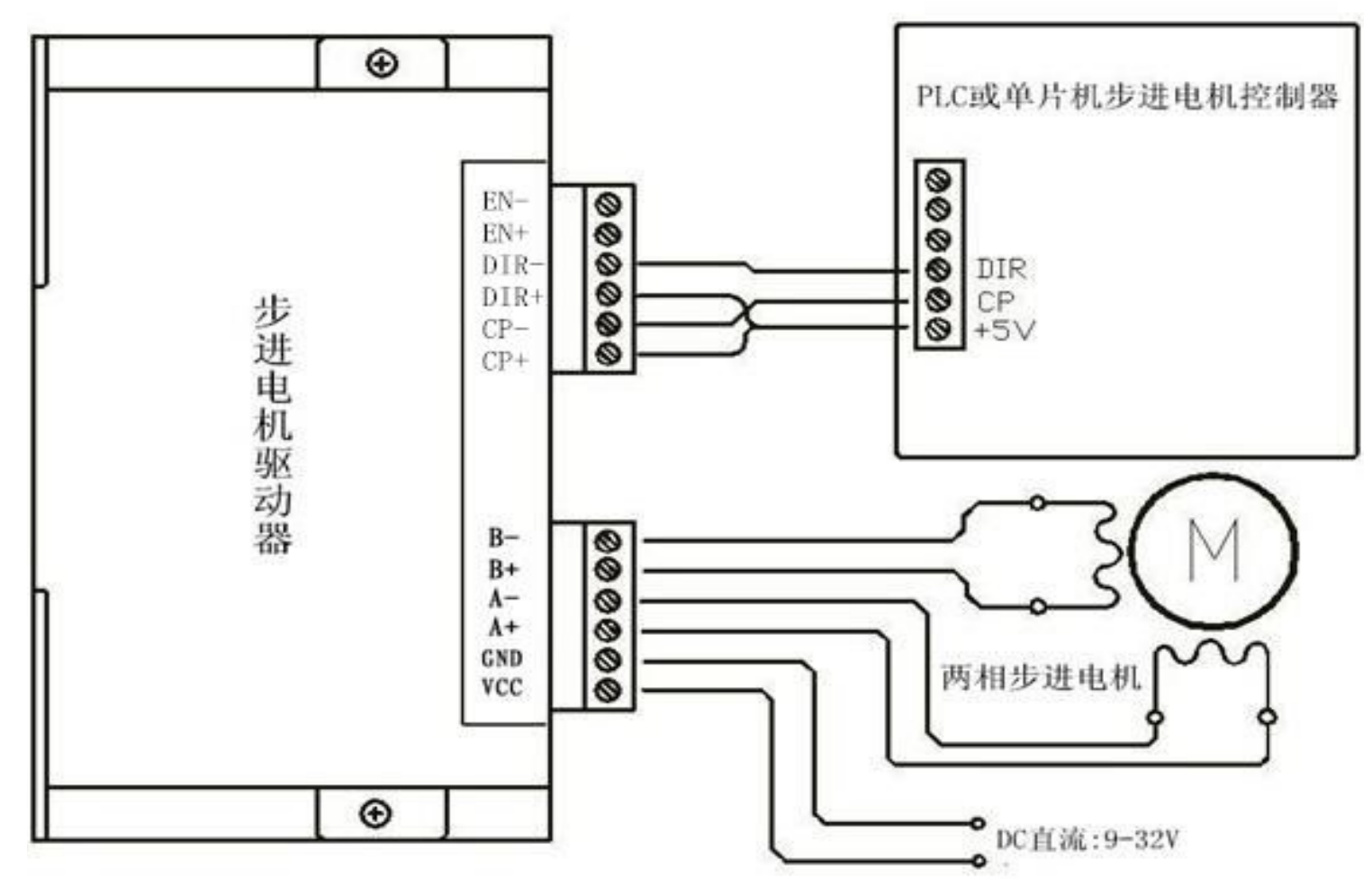

我此次选用的是两相四线的步进电机,把它的4根线按照电机给的说明书分别接到驱动的的A+,A-,B+,B-即可,驱动器的电源接线就不用说了吧!
接下来重点来了,因为控制器与驱动器有两种接法,如下图
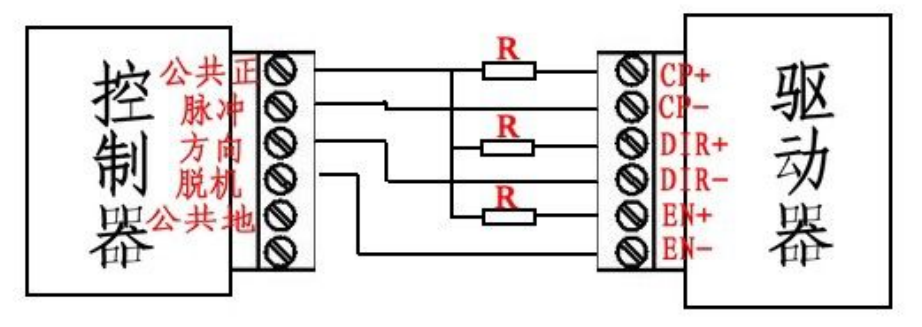
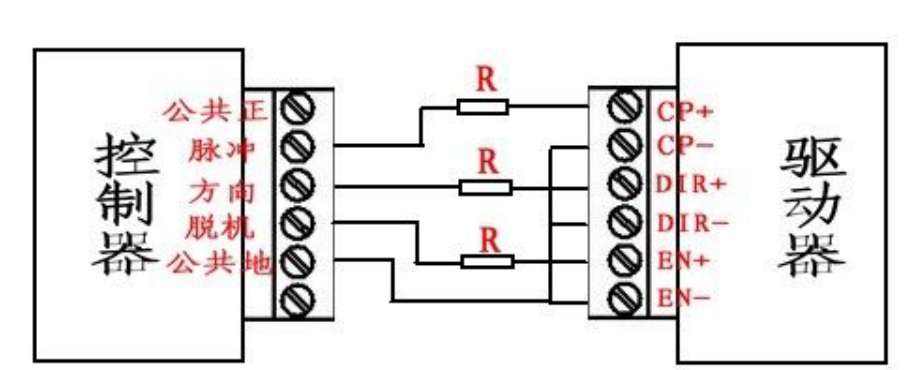
虽然我们可以每一种都试一下也不耽误时间,但我还是要在这里讲解下为什么我选择了共阳而不选共阴。看过TB6600驱动器说明书的童靴,应该知道它与控制器(就是本文的单片机)的连接有两种方式,即共阴或者共阳,此刻有没有想到数码管的共阴共阳哈哈。其实都是一样的概念。我一看说明书毫不犹豫的就按照共阴的接法接好电路,结果一试,电机它丝毫不动。后来我看了下驱动器的接口是光驱动的,而选择共阴接法的话,就意味着我们得靠单片机I/0口的电流来驱动里面的发光二极管,我们都知道单片机I/o口的驱动能力非常小,查看手册可知I/O口的拉电流只有几uA根本不足以驱动发光二极管,的而它的灌电流可达15mA,此时足以驱动发光二极管,这就是为什么要选择共阳接法。
程序代码
// An highlighted block
/*******************程序功能********************* 1.控制电机停止与启动 2.控制电机正反转 3.控制电机转速 3.控制电机按一定角度步进 ************************************************/
#include<reg52.h>
//电机控制引脚
sbit CLK = P1^0;
sbit ENA = P1^1;
sbit DIR = P1^2;
//按键控制端
sbit P_TS = P2^0; //正转控制端
sbit N_TS = P2^1; //反转控制端
sbit P_ADJ = P2^2; //调速+
sbit N_ADJ = P2^3; //调速-
sbit StopStart = P2^4; //停止与启动
sbit P_Step = P2^5;
sbit N_Step = P2^6;
sbit SS_Step = P2^7;
unsigned int Tspeed[3]={
20,4000,10000}; //调速等级表
unsigned int StepAngle[4]={
100,200,400,800}; //步进角度表--90度/180度/360度/720度
bit Run_Status=0;
bit CY_status=0;
unsigned int CYCLE=20;
unsigned int cy_count=0;
unsigned PWM_count=0;
void Init_time();
void Key_scan();
void Step(unsigned int step_count);
/*void delay() //延时函数 { unsigned int i = 200; while (i--); } */
void main()
{
ENA=1;
CLK=0;
DIR=0; //初始化电机
Init_time(); //初始化定时器
while(1)
{
Key_scan();
}
}
void Init_time() //初始化定时器
{
TMOD |= 0x01;
TH0=(65536-CYCLE)/256; //给time0装初值
TL0=(65536-CYCLE)%256;
//TH1=(65536-2000)/256; //给time1装初值
//TL1=(65536-2000)%256;
IE = 0x82;
//PT1=1; //使得time1的优先级高于time0
TR0=1; //打开两个中断
//TR1=1;
}
void Enter_Timer0() interrupt 1 //进入定时器中断
{
TH0=(65536-CYCLE)/256;
TL0=(65536-CYCLE)%256;
CLK=~CLK;
PWM_count++;
if(PWM_count==(2*cy_count)&&CY_status)
{
PWM_count=0;
TR0=0;
ENA=0;
}
}
/*void Enter_timer1() interrupt 3 { TH1=(65536-2000)/256; //给time1装初值 TL1=(65536-2000)%256; Key_scan(); } */
/************************按键扫描程序************************ 功能:读取各按键值,判断是否按下,再处理相应事件 注:按键控制程序,由于按键中断优先级高,且每个按键都设计 为弹起有效, 所以长时间按住不放会导致电机减速甚至停 止直至放开按键 *************************************************************/
void Key_scan()
{
static char i=0,j=0;
if(P_TS==0) //正反转切换
{
//delay(); //按键消抖
if(P_TS==0)
{
while(!P_CW); //按键按下直到放开
DIR=1;
}
}
if(N_TS==0) //正反转切换
{
//delay(); //按键消抖
if(N_TS==0)
{
while(!N_CW); //按键按下直到放开
DIR=0;
}
}
if(P_ADJ==0) //加速
{
//delay();
if(P_ADJ==0)
{
while(!P_ADJ);
i--;
if(i<1)
i=0;
CYCLE=Tspeed[i];
}
}
if(N_ADJ==0) //减速
{
//delay();
if(N_ADJ==0)
{
while(!N_ADJ);
i++;
if(i>2)
i=2;
CYCLE=Tspeed[i];
}
}
if(StopStart==0)
{
//delay();
if(StopStart==0)
{
while(!StopStart);
Run_Status=~Run_Status;
if(Run_Status)
{
ENA=1; //启动电机
TR0=1; //开启中断产生脉冲信号
}
else
{
ENA=0; //关闭电机
TR0=0; //关闭中断停止脉冲信号
CY_status=0; //刷新步进标志位
}
}
}
if(P_Step==0)
{
//delay();
if(P_Step==0) //步进角度+
{
while(!P_Step);
j++;
if(j>3)
j=3;
Step(StepAngle[j]);
}
}
if(N_Step==0) //步进角度-
{
// delay();
if(N_Step==0)
{
while(!N_Step);
j--;
if(j<1)
j=0;
Step(StepAngle[j]);
}
}
if(SS_Step==0) //按一定步进角度步进,每按下一次转动一定步进角后停止
{
//delay();
if(SS_Step==0)
{
while(!SS_Step);
Step(StepAngle[j]);
}
}
}
/***********************角度控制函数*************************/
void Step(unsigned int step_count)
{
PWM_count=0;
CY_status=1;
cy_count=step_count;
ENA=1;
TR0=1;
}
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/143847.html原文链接:https://javaforall.net


