
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
由于毕设研究需要使用webots软件,在学习使用webots的过程花费了很多时间。由于这个软件基本没有什么中文资料,所以想把自己所学到的一些东西写下来,如有什么错误的地方,大家可以批评指正。
1.界面介绍
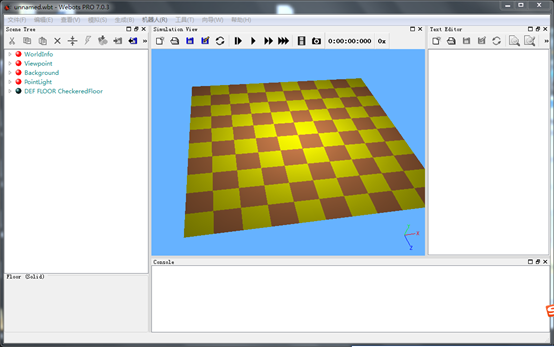
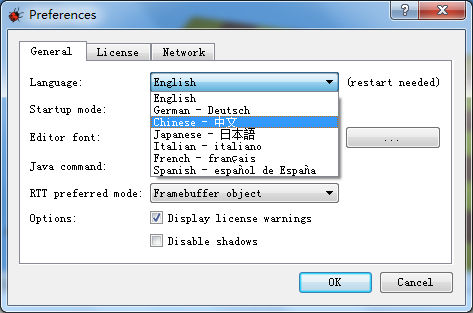
打开webots软件,我使用的是webots pro 7.0.3,界面大概如下,该软件是支持中文的,可以通过Tools->Prefences…选项,在General中language选项改成Chinese-中文。

由于语言已经改成了中文,菜单栏的内容比较简单,在帮助这一栏有用户指南(guide)和参考手册(reference),英语好的同学可以自行阅读学习,其他的在使用到的时候我们再详细介绍。
在界面的左边的窗口是Scene Tree(场景树),模型和环境的建模都在这个窗口。场景树有多个节点组成,节点又可以展开新节点。红色节点可以展开或者新建,蓝色节点表示保存的一些属性参数。
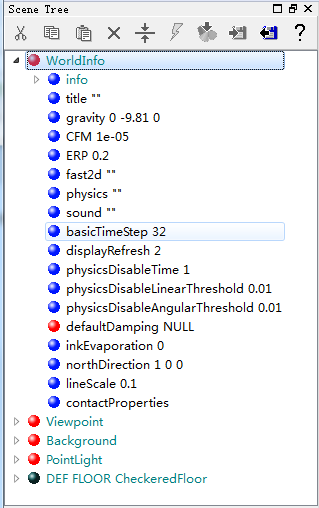
最上面的三个节点是WorldInfo(世界信息)、Viewpoint(视角)、Background(背景),这三项是无法删除的。
WorldInfo里面有仿真物理学的一些参数,我们一般不修改这些参数。
basicTimeStep:这个参数,它代表仿真最小的时间单元,当它为32时,即每次仿真的时间步长为32毫秒。
Gravity:是重力的大小和方向,xyz的方向可以看仿真视图(界面中间Simulation View)的右下角会有一个坐标系,如图没有坐标系,可以在菜单栏:查看->可选显示->显示坐标系统打开。
Physics:搭载物理插件的参数,在后期需要用到机械上的铰链、万向节等结构时需要用到物理插件。
其他的参数意义可以自行查看 参考手册(F4)(reference.pdf) 3.53节 WorldInfo

在场景树上有一排工具栏,前三个分别是剪切 、复制、粘贴,这三个工具是对节点进行剪切、复制、粘贴的(PS:这个软件没有返回,操作需谨慎)。接下来是删除、重置、转换、新建、导出、导入、帮助,这些工具都是对节点进行操作的。
、复制、粘贴,这三个工具是对节点进行剪切、复制、粘贴的(PS:这个软件没有返回,操作需谨慎)。接下来是删除、重置、转换、新建、导出、导入、帮助,这些工具都是对节点进行操作的。
ViewPoint:里面的参数记录了你在仿真视图中观察的角度和位置,除非特殊需要,可以直接用鼠标左键右键中键点击仿真视图拖拽进行视图调整。follow可以锁定一个节点,在仿真的时候视图跟随其运动。
Bcakground:背景颜色RGB。
接下来的两个节点是PointLight和checkeredFloor,这两个节点是新建时自动添加的,分别是光源和地板,也可见删除自己在新建。这两个节点有位置和大小信息,可以自行修改看看效果。

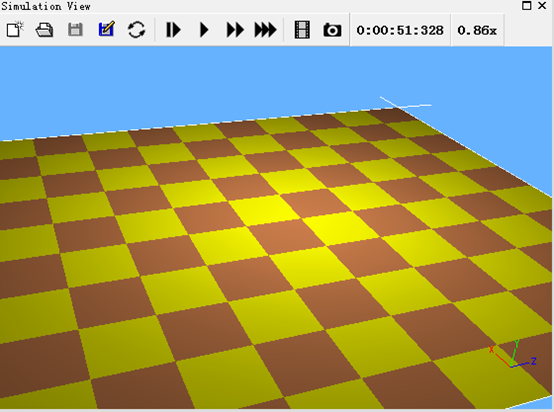
在仿真视图上有一排工具,前五个是新建 、打开、保存、另存为、重置(退回为保存时的状态),都是对世界模型的操作。接下来是一堆像播放的按钮,依次是单步仿真、实速仿真、加速仿真、最快速仿真(不显示画面),然后是录像和拍照,输出视频和图片。最后是仿真时间和仿真速度。
、打开、保存、另存为、重置(退回为保存时的状态),都是对世界模型的操作。接下来是一堆像播放的按钮,依次是单步仿真、实速仿真、加速仿真、最快速仿真(不显示画面),然后是录像和拍照,输出视频和图片。最后是仿真时间和仿真速度。
最右边的文本编辑窗口,也就是编辑控制器程序的窗口,这次先不介绍。
2.建立一个简单的模型
接下来我们建一个简单的模型,一个球自由落体,看看仿真效果。
在建立模型时,先观察仿真时间是否为0时刻 ,不是的话点击仿真窗口重置按钮重新加载世界,因为仿真时间不为0是无法保存的。
,不是的话点击仿真窗口重置按钮重新加载世界,因为仿真时间不为0是无法保存的。
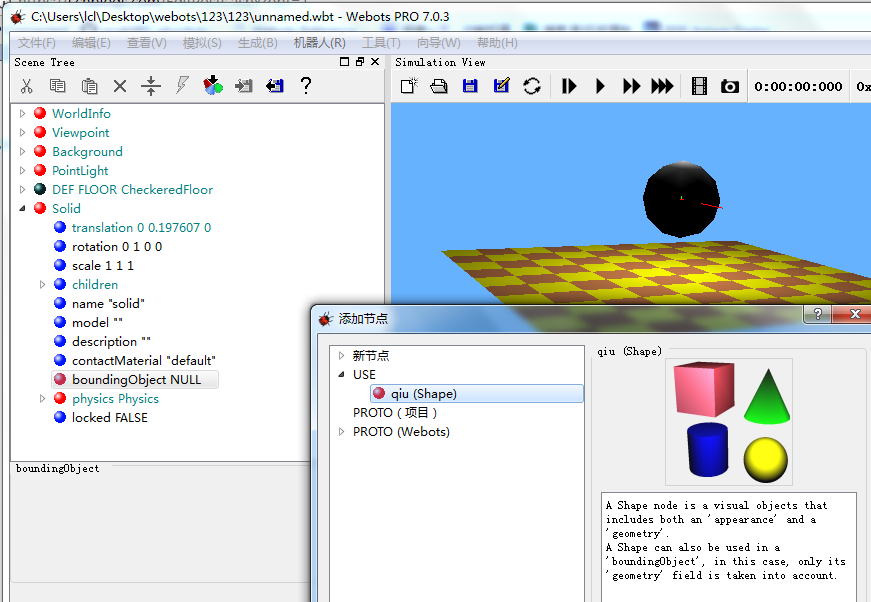
在左边场景树种点击新建 ,选择新节点的Solid(实体)。在Solid节点展开下点击children,新建shape节点,并点击shape节点,在下方DEF中输入qiu,回车,将Shape节点命名为qiu。在shape节点下点击geometry NULL,新建sphere节点。
,选择新节点的Solid(实体)。在Solid节点展开下点击children,新建shape节点,并点击shape节点,在下方DEF中输入qiu,回车,将Shape节点命名为qiu。在shape节点下点击geometry NULL,新建sphere节点。

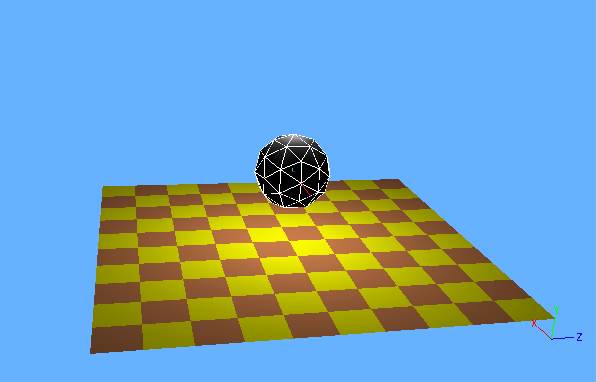
然后仿真视图,会有个球,一半在地面上,solid节点下的translation改成(0,0.2, 0)。球完全出现在了地板上方。点击boundingObject NULL,新建节点USE下的qiu(Shape),如果USE节点下面没有出现 qiu(Shape),一般是因为之前没有给Shape节点命名。(PS:这个命名不是节点下面的name属性,name属性是控制器会用到的,命名方法是点击节点,在下方DEF中输入)。
添加好了会出现如下图的线框网格,代表这个物体的外边界,即和其他物体发生碰撞的边界,如果没有出现,在场景里点一下球体。
然后在physics NULL中添加physics节点,这个节点下可以设置密度和质量了,默认是密度1000,质量-1,-1代表不使用质量这个属性,如果要设置质量信息,将密度改成-1,质量改成相应值就好了。
然后保存一下世界,预先创建一个文件夹,要创建两级目录,比如D:\webots\robot\robot,因为在后面添加控制器时,软件自动创建D:\webots\robot\controller这个文件夹,为了避免不同项目的控制器不相互干扰,所以创建一个两级目录。点击菜单栏 文件->保存世界。
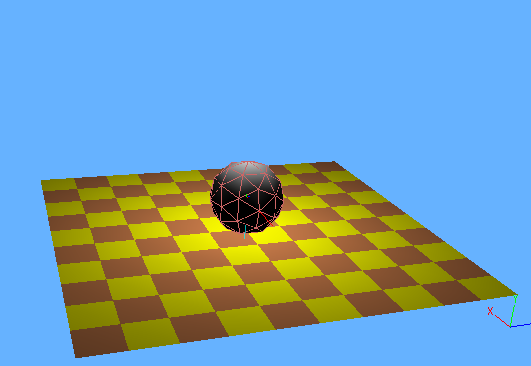
然后点击一下仿真按钮 ,就能发现球落在了地板上。这样一个简单的自由落体就完成了。
,就能发现球落在了地板上。这样一个简单的自由落体就完成了。
接下来说一下用鼠标简单的移动物体。选中球体,按下Shift+鼠标左键,发现可以在水平面上移动球体。还有其他的按键如下。
Shift+鼠标左键:水平移动物体
Shift+鼠标中间键:铅直移动物体
Shift+鼠标右键:沿xyz轴旋转物体,连续按下shift键,旋转轴会在XYZ依次轮换。(然后你会发现你把粘滞键按出来了,哈哈,强迫症一直按吧,开个玩笑,可以忽略)
Alt+鼠标左键:添加一个力(仿真运行时才有反应)
Alt+鼠标右键:添加一个力矩(仿真运行时才有反应)
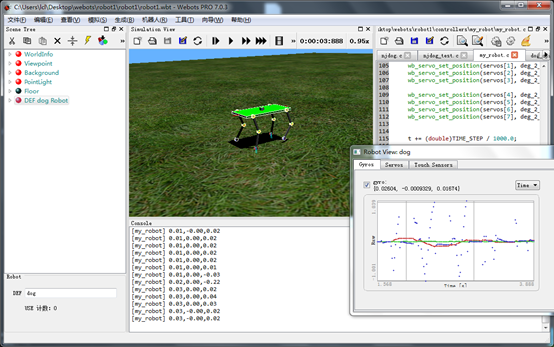
自己第一次发这种软件教程。这个例子比较简单,不足以展示这个软件的功能,但是这个软件确实很强大,下一次我会发一个四足机器人的模型建立、传感器输出、还有控制器的编写,大概这个样子。

原创文章,出自”博客园, _阿龙clliu” :http://www.cnblogs.com/clliu/
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/168213.html原文链接:https://javaforall.net


