
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
1.3.3接收机
单个散射体的回波波形 具有下面的形式:


其中,幅度调制A(t)仅仅表示脉冲的包络。接收机处理的主要功能是将雷达信号中承载信息的部分变换到基带,目的是测量 。
。
接收机的信号被分到两个通道。为同相“I”通道,在这个通道中接收信号和振荡器(本振)的信号进行混频。这个混频产生了和频和差频两个频率分量:

其中,和频分量会被低通滤波器滤掉,仅仅留下调制项 。
。
另一个通道为“Q”为正交通道。Q通道的混频输出为

低通滤波后剩下调制项 。
。
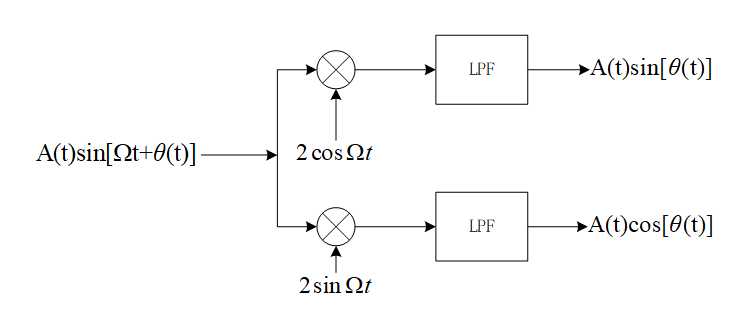
图1.2 常规的正交通道接收机结构
为什么同时需要I和Q两个通道,因为这两个通道中单独任何一个都不能提供足够的信息,以无模糊的确定相位调制 。
。
另一种等效的复指数信号可以表示:
要求:
I、Q通道在信号的带宽范围内必须具有完全相同的传递函数,另外用于解调I、Q通道信号的振荡器的信号必须是完全正交的。
1.4雷达信号处理的共同主线
雷达能否对于环境中的目标进行检测、跟踪和成像,收到目标、环境和雷达自身的影响,此外还与这些物体的反射回波的方式有关。两个最基本也是最重要的信号质量测度是SIR和分辨率。
1.4.1信干比与积累
信号 ,期望信号 ,干扰信号 。那么信干比的定义为期望信号功率与干扰信号功率之比。
,期望信号 ,干扰信号 。那么信干比的定义为期望信号功率与干扰信号功率之比。
干扰信号几乎总被建模成随机过程,功率等于其均方值 。如果干扰信号为零均值,干扰信号的功率也等于干扰的方差 。
。如果干扰信号为零均值,干扰信号的功率也等于干扰的方差 。
举例:  为复正弦信号 , 为高斯复白噪声,其均值方差为,则它们的和信号 的SIR为
为复正弦信号 , 为高斯复白噪声,其均值方差为,则它们的和信号 的SIR为
若 为实信号,则平均SIR为 ,因为幅度为A的实值正弦或余弦的平均功率为 。
SIR影响什么:
- 可能影响检测、跟踪和成像
- 一般而言,检测性能的改善与SIR相关,SIR增大,
 也增大
也增大 - 雷达成像时,SIR直接影响图像的对比度和动态范围。
1.4.2分辨率
考虑两个等强度的散射体,如果它们能够在系统输出端产生两个分离的,可辨识的信号,则认为它们是可以分辨的。分辨的概念可应用于距离、横向、多普勒频移、速度和到达角。为了能够清楚地分辨两个频率,需要频率间隔大于或等于瑞利宽度。
雷达的分辨率反过来决定了分辨单元的尺寸。
常规距离分辨率为 ,仅适用于未调制的具有恒定频率的脉冲。
,仅适用于未调制的具有恒定频率的脉冲。
如果是方位维和俯仰维的角分辨率由同一平面上的天线波束带宽决定的(一般取3dB波束带宽 )。
)。
横向分辨率 。
。
注意:1)文献中通常没有明确指出需要给定的是单程还是双程3dB波束带宽,对于单基雷达应该采用双程波束带宽。
2)横向分辨率是随距离线性增加的,距离分辨率为一常量
3)横向分辨率可以通过信号处理技术得到改善,使其远远优于的极限,且不随距离变化。
雷达分辨单元的体积V近似于3dB天线主瓣对应的总立体角与距离分辨率的乘积。对于一个方位和俯仰波束带宽分别为 的椭圆状波束,有
的椭圆状波束,有
 (近似大27%,仍被广泛使用)
(近似大27%,仍被广泛使用)
1.4.3数据积累和相位历程建模
为改善SIR,可采取的方法是积累(相干积累和非相干积累)。前者是对复(幅度和相位)数据进行积累,后者只是对幅度(平方或对数)进行积累。
对于N个测量值进行相干积累会使SNR改善N倍,与之对应的增量为积累增益。确实,增加SNR能够改善目标检测和参数估计的性能。代价是采集联合处理这N个脉冲数据所需要的额外时间,能量和计算量等。
1.4.4带宽扩展
傅里叶变换的尺度性质:信号在时域的增长导致了在频域的压缩。在频率变宽,时域就一定会变窄。
所以改善距离分辨率需要增加波形带宽(对应的频率),这促使了设计者采用相位和频率调制的带宽波形代替简单脉冲。改善横向分辨率需要以较宽的角度区间观测场景,增加横向的空间频率带宽。改善速度(多普勒)分辨率需要较长的观测时间,改善角度分辨率可以通过采用更大的孔径(天线)实现。
1.5基本雷达信号处理概述
信号处理的运算可以大致分为:信号调节和干扰抑制、成像、检测和后处理
典型的快时间信号处理运算:数字I/Q信号的形成,波束形成、脉冲压缩或匹配滤波、灵敏度时间控制。
雷达信号处理运算的下一个层次是多个脉冲数据运算。
1.5.3信号调节和干扰抑制
主要包括了固定或自适应的波束形成、脉冲压缩、杂波滤波和多普勒处理,是为了使雷达数据变得更干净。
脉冲压缩是为了解决系统灵敏度与分辨率的矛盾。
杂波滤波和多普勒处理都是抑制杂波、提高运动目标检测性能的技术。杂波滤波通常采用运动目标显示(MTI)的形式。
1.5.5检测
雷达信号处理最基本的功能是检测感兴趣的目标是否存在。需要采用统计模型,比如阈值检测。
第一章基本内容如上,当然要完全学习的,还是推荐买一本书
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/179608.html原文链接:https://javaforall.net


