
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
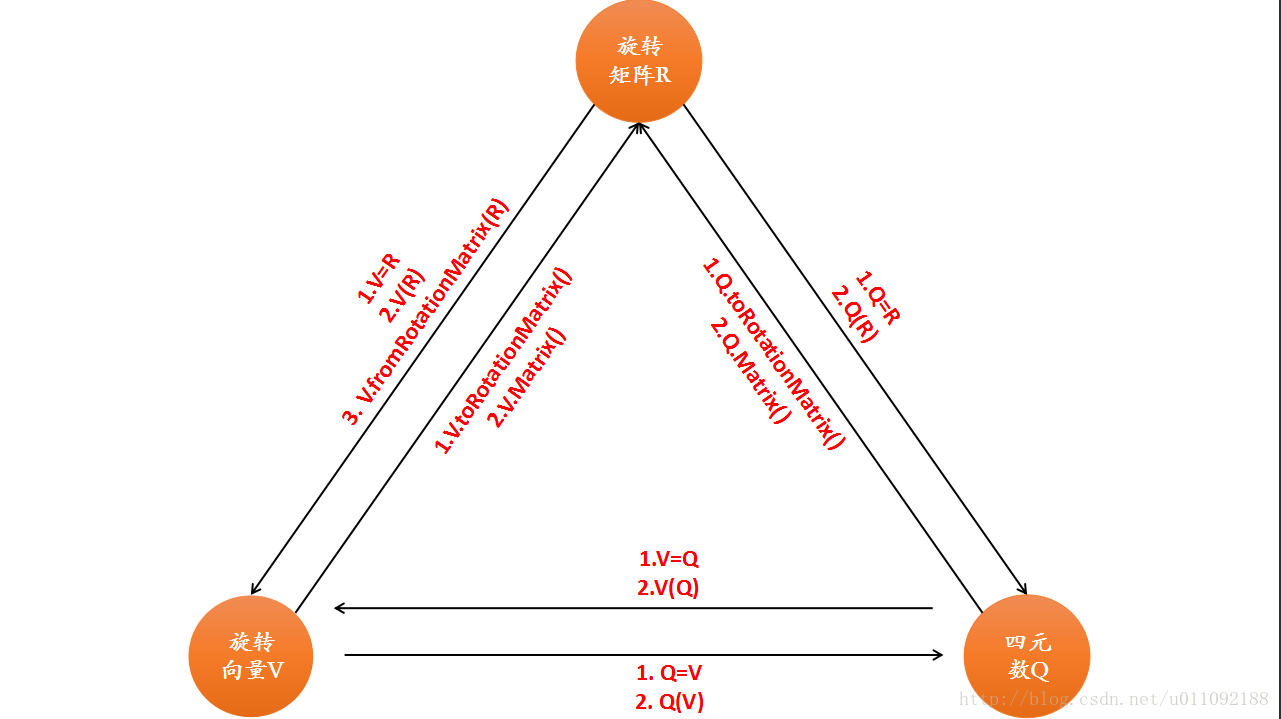
旋转矩阵,旋转向量,四元数关系如下:
 另外,初始化(赋值)变换矩阵T的方式为:
另外,初始化(赋值)变换矩阵T的方式为:
Isometry3d Tcw(rotation);//rotation可以是旋转矩阵,可以是四元数,可以是旋转向量
Tcw.pretranslate(t);//添加平移向量
//或者:
Isometry3d Tcw=Isometry3d::Identity()//如果没有直接初始化,先设为单位阵
Tcw.prerotate(rotation1);//然后添加旋转矩阵,或者向量,或者四元数
Tcw1.pretranslate(t1);//添加平移向量
从变换矩阵获取旋转矩阵和平移矩阵:
Tcw.rotation();//返回旋转矩阵
Tcw.translation();//返回旋转矩阵
实例
设有小萝卜一号和小萝卜二号位于世界坐标系中,小萝卜一号的位姿为:q1=[0.35,0.2,0.3,0.1],
t2=[0.3,0.1,0.1]^T (q的第一项为实部。请你把q归一化后在进行计算)。这里的q和t的表达的是Tcw,也就是世界到相机的变换关系。小萝卜二号的位姿为q2=[-0.5,0.4,-0.1,0.2],t=[-0.1,0.5,0.3]^T.现在,小萝卜一号看到某个点在自身的坐标系下,坐标为p=[0.5,0,0.2]^T ,求该向量在小萝卜二号坐标系下的坐标,请编程实现此事。方法一:直接用四元数
Quaterniond q1={0.35,0.2,0.3,0.1},q2={-0.5,0.4,-0.1,0.2};
Vector3d t1={0.3,0.1,0.1},t2={-0.1,0.5,0.3},p={0.5,0,0.2};
Vector3d world,cam2;
q1=q1.normalized();
q2=q2.normalized();
world=q1.inverse()*(p-t1);
cam2=q2*world+t2;
cout<<cam2<<endl;方法二:使用旋转矩阵
Matrix3d rotation1=q1.toRotationMatrix();
Matrix3d rotation2=q2.toRotationMatrix();
Matrix3d R1,R1_inv,R2;
world=rotation1.inverse()*(p-t1);
cam2=rotation2*world+t2;
cout<<cam2<<endl;方法三:使用变换矩阵(直接)
Isometry3d Tcw1(rotation1),Twc1,Tcw2(rotation2),Twc2;//直接初始化,不需要设定单位阵
Tcw1.pretranslate(t1);
Tcw2.pretranslate(t2);
//cout<<Tcw1.matrix()<<endl;
Twc1=Tcw1.inverse();
//cout<<Twc1.matrix()<<endl;
world=Twc1*p; cout<<rotation1<<endl;
cam2=Tcw2*world;
cout<<cam2<<endl;
return 0;方法三:使用变换矩阵(直接)
Isometry3d Tcw1=Isometry3d::Identity(),Twc1,Tcw2=Isometry3d::Identity();//如果没有直接初始化,先设为单位阵
Tcw1.prerotate(rotation1);
Tcw2.prerotate(rotation2);
Tcw1.pretranslate(t1);
Tcw2.pretranslate(t2);
//cout<<Tcw1.matrix()<<endl;
Twc1=Tcw1.inverse();
//cout<<Twc1.matrix()<<endl;
world=Twc1*p;
cam2=Tcw2*world;
cout<<cam2<<endl;
return 0;方法四:间接使用变换矩阵(间接)
Isometry3d Tcw1=Isometry3d::Identity(),Twc1,Tcw2=Isometry3d::Identity();//如果没有直接初始化,先设为单位阵
Tcw1.prerotate(rotation1);
Tcw2.prerotate(rotation2);
Tcw1.pretranslate(t1);
Tcw2.pretranslate(t2);
world=Tcw1.rotation().inverse()*(p-Tcw1.translation());
cam2=Tcw2.rotation()*world+Tcw2.translation();
cout<<cam2<<endl;
return 0;C++数组和矩阵转换
使用Map函数,可以实现Eigen的矩阵和c++中的数组直接转换:
Map类用于通过C++中普通的连续指针或者数组 (raw C/C++ arrays)来构造Eigen里的Matrix类,这就好比Eigen里的Matrix类的数据和raw C++array 共享了一片地址,也就是引用。
数组转静态矩阵:
int i;
double *aMat = new double[20];
for(i =0;i<20;i++)
{
aMat[i] = rand()%11;
}
Eigen:Map<Matrix<double,4,5> > staMat(aMat);
virtual void oplusImpl(const double* update) override
{
Eigen::VectorXd::ConstMapType v(update,VectexCameraBAL::Dimension);
_estimate+=v;
}
数组转动态矩阵:
int i;
double *aMat = new double[20];
for(i =0;i<20;i++)
{
aMat[i] = rand()%11;
}
Eigen::Map<MatrixXd> dymMat(aMat,4,5);virtual void oplusImpl(const double* update) override
{
Eigen::Vector3d::ConstMapType v(update);
_estimate+=v;
}
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/180433.html原文链接:https://javaforall.net


