
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
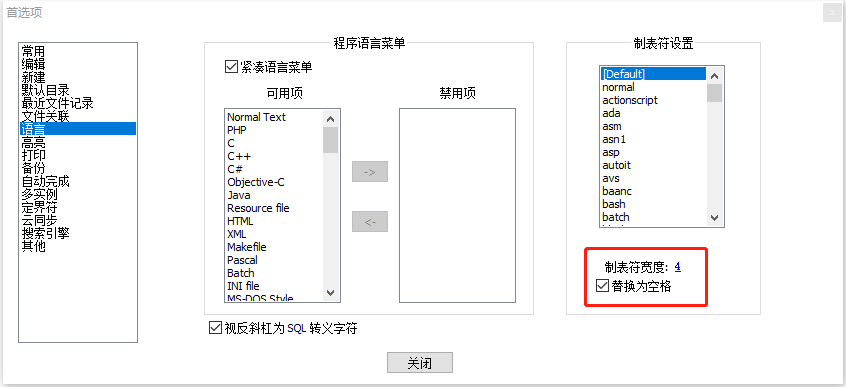
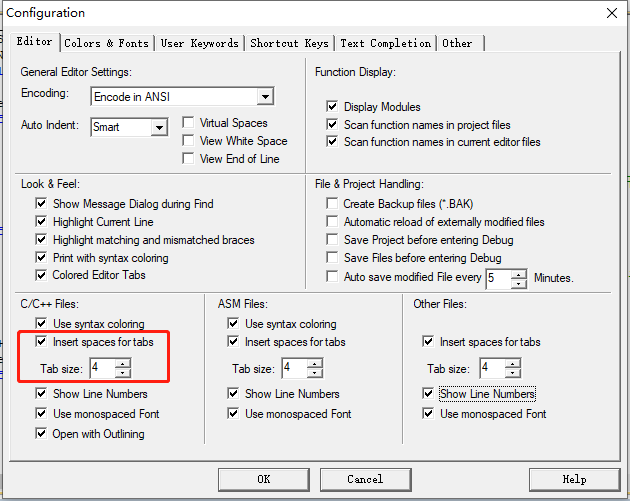
一、缩进的空格数为4个。最好配置代码编辑器将TAB键设置为空格替换,避免出现另一个编辑器打开时格式变乱的情况。
例如Notepad++设置

KEIL设置
二、“{” 和 “}”各自独占一行。
不规范例子:
for(i = 0; i < student_num; i++)
{ if((score[i] >= 0) && (score[i]) <= 100)
total_score += score[i];
else
printf(" error! score[%d] = %d\n", i, score[i]);
}其中if应该换行,让“{”独占一行。
规范的例子:
for(i = 0; i < student_num; i++)
{
if((score[i] >= 0) && (score[i]) <= 100)
{
total_score += score[i];
}
else
{
printf(" error! score[%d] = %d\n", i, score[i]);
}
}
三、 当if的判断和执行句子较短时,也需要换行。
不规范如下格式:
if(student_num > 100)i = 0;规范示例:
if(student_num > 100)
{
i = 0;
}四、if判断内容较长,可以考虑换行提高可阅读性
不规范例子:
if((print_montion[0]!=SYS_PARAM.Motor_PARAM[0].Set_Speed)||(print_montion[1]!=SYS_PARAM.Motor_PARAM[1].Set_Speed))if((M_rise && M_rise_temp)||(M_stretch && M_stretch_temp)||(M_revolve && M_revolve_temp))break;规范示例:
if( (print_montion[0] != SYS_PARAM.Motor_PARAM[0].Set_Speed) ||
(print_montion[1] != SYS_PARAM.Motor_PARAM[1].Set_Speed) )if( (M_rise && M_rise_temp) ||
(M_stretch && M_stretch_temp) ||
(M_revolve && M_revolve_temp) )
{
break;
}换行后也要注意缩进对齐,使得排版整洁。
五、switch-case语句标准格式
规范示例:
switch(variable)
{
case value1:
...
break;
case value2:
...
break;
...
default:
...
break;
}六、if、for、do、while、case、switch、default语句独占一行,且if、for、do、while语句的执行语句部分无论多少都要加大括号”{}”。
七、严禁横向代码!!!
不规范示例:
if ( M_rise ) {EN_s = Enable; TIM_CCxNCmd(TIM1,TIM_Channel_1, ENABLE); }
if ( M_stretch ){EN_q = Enable; TIM_CCxNCmd(TIM1,TIM_Channel_2, ENABLE); }
if ( M_revolve ){EN_x = Enable; TIM_CCxNCmd(TIM1,TIM_Channel_3, ENABLE); }修改:(这里的例子命名不规范,大家不要学)
if(M_rise)
{
EN_s = Enable;
TIM_CCxNCmd(TIM1, TIM_Channel_1, ENABLE);
}
if(M_stretch)
{
EN_q = Enable;
TIM_CCxNCmd(TIM1, TIM_Channel_2, ENABLE);
}
if(M_revolve)
{
EN_x = Enable;
TIM_CCxNCmd(TIM1, TIM_Channel_3, ENABLE);
} 不要非主流自创风格,记住代码是给别人读的!
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/180789.html原文链接:https://javaforall.net


