
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
首先我们安装好loadrunner 12之后,出现这三个图标,然后开始操作。

操作:
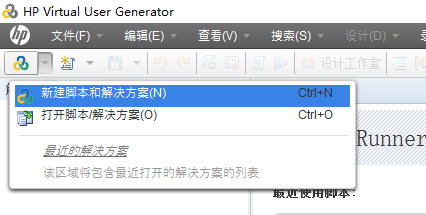
1.打开Virtual User Generator ,新建脚本
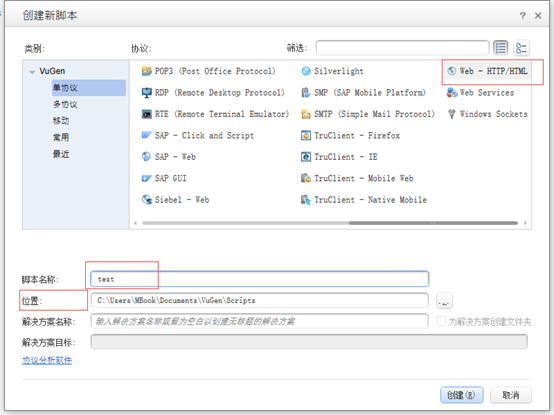
2.选择脚本协议,对脚本名称位置可以进行编辑。此处以web-http/html 为例。
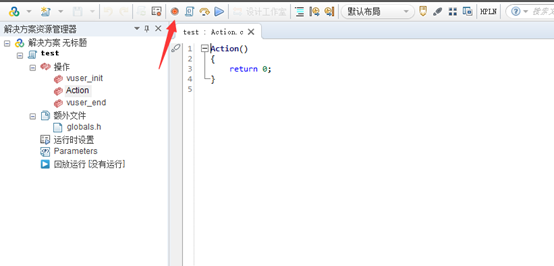
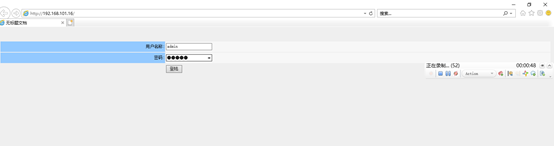
3.点击创建后,选择录制脚本,填写好录制的地址,应用程序,然后选择开始录制,此处以测试登录为例

4.结束录制后,点击关联回放,确保脚本无误
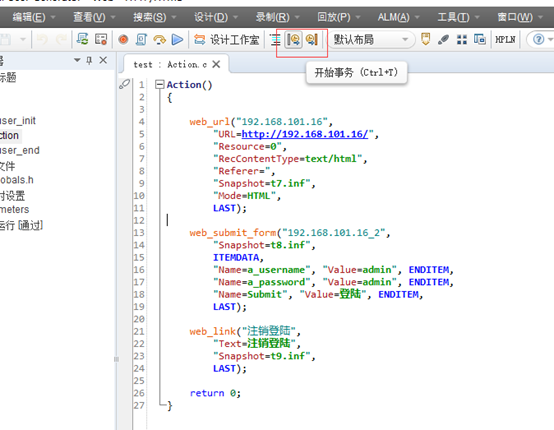
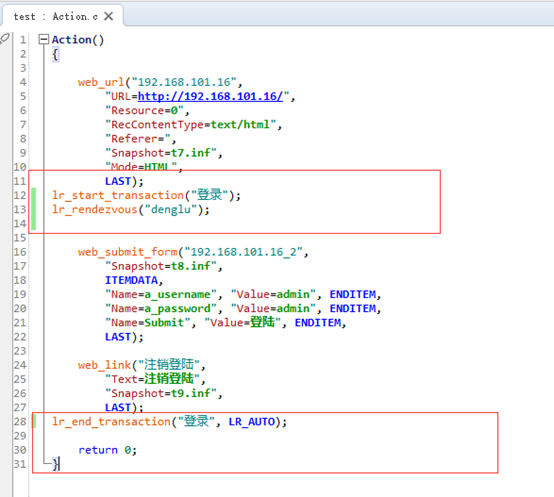
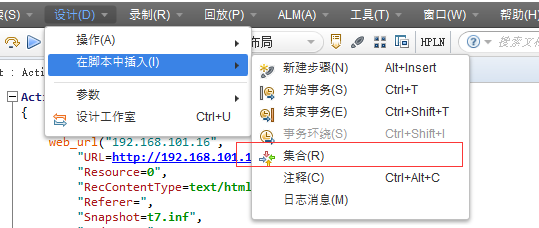
5.对代码进行进一步完善,插入事务或集合点
6. 对脚本进行执行回放,确保脚本无误,对脚本进行参数化
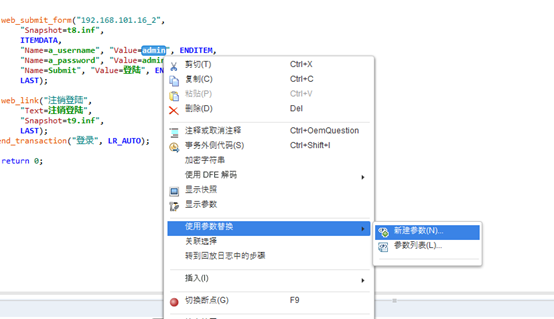
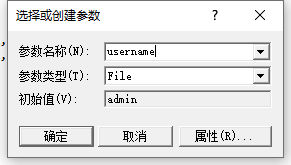
可以直接点击确定,或直接点击属性建立参数表,这里我直接点击属性,点击创建表
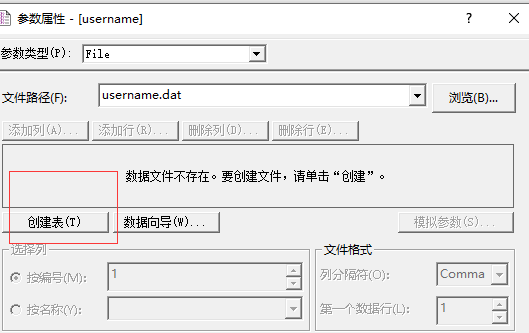
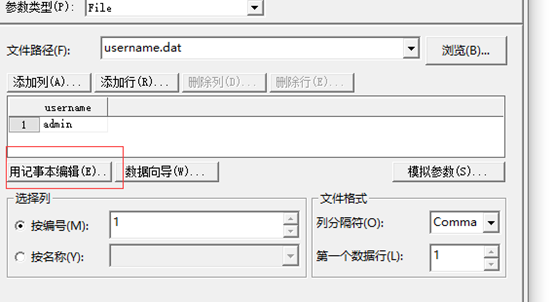
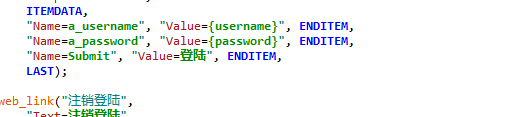
选择添加行逐个数据添加,或用记事本编辑,这里我用记事本编辑为例,点击关闭之后,选择确定,出现下图选择否,因为不同位置参数不一定相同。如果相同选择是。
相同步骤,对密码进行参数化
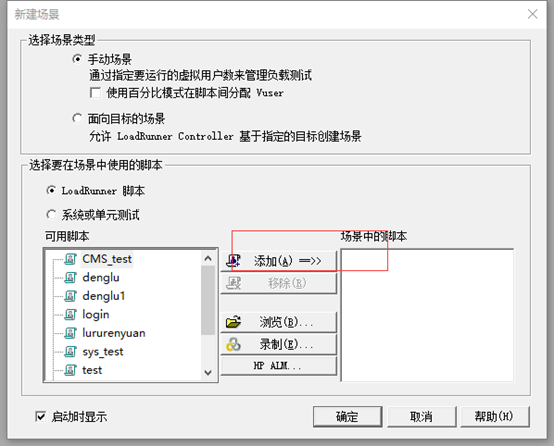
7. 打开controller,或点击工具,创建场景,但是此方法打开运行会比较慢,所以我使用桌面图标直接打开。
 或
或
8.选择刚刚建立的脚本,点击添加,点击确定.
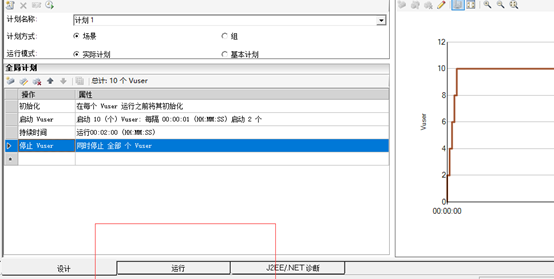
9. 对场景计划进行编辑,点击双击即可编辑,更改参数
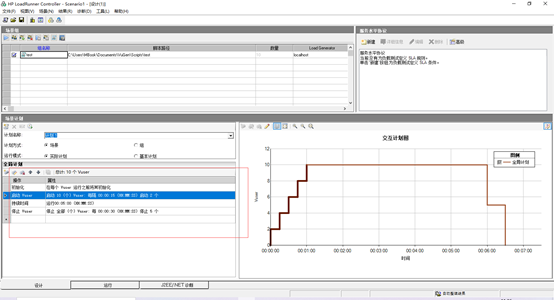
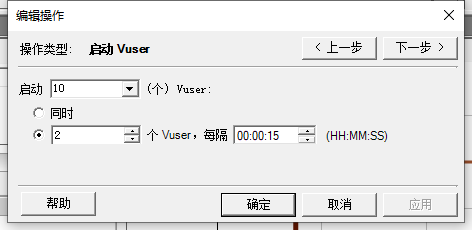
10. 设定好场景计划后,点击运行
11.点击开始场景

12.运行完成后,可以得到如下图
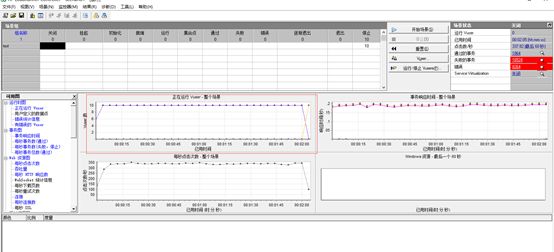
双击可以打开大图查看,边上的蓝色为可用图,双击也可以打开
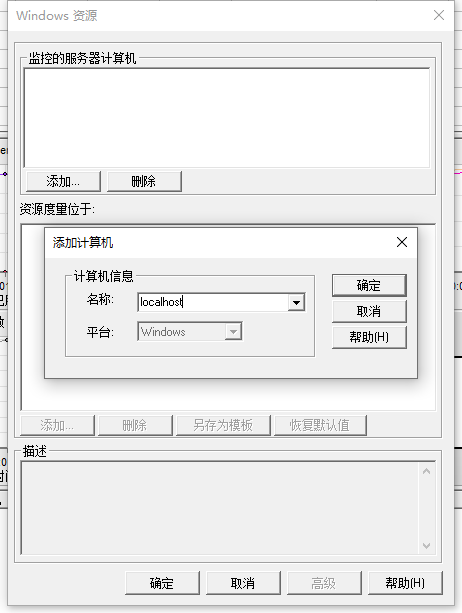
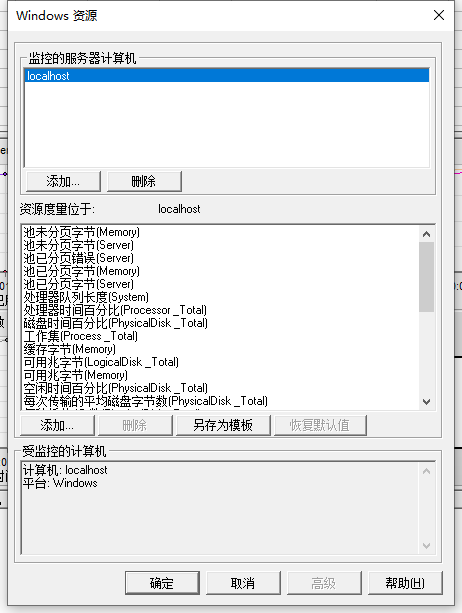
要查看windows资源,右击选择添加度量,点击添加,名称输入localhost,点击确定,选择你需要的度量,点击确定
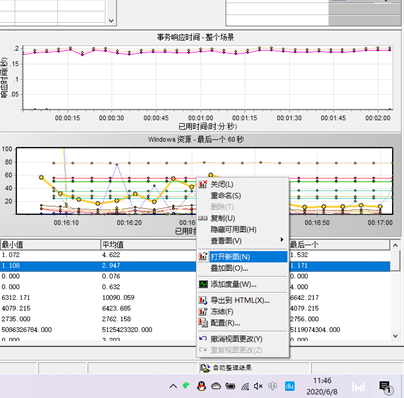
右键点击冻结即可停止。
13.点击结果,选择分析结果,或者直接打开桌面图标analysis,这里我直接在里边打开分析结果
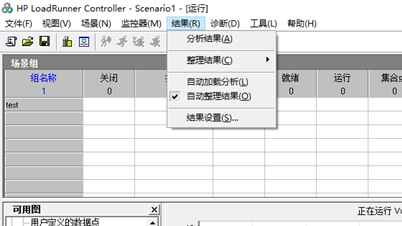 或
或
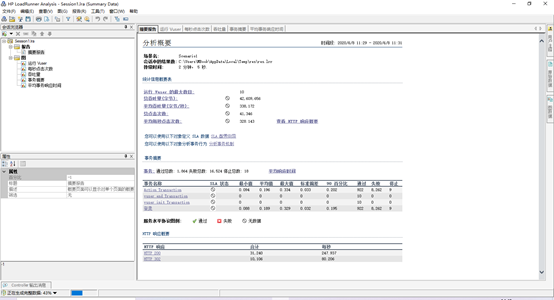
得出结果报告
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/182212.html原文链接:https://javaforall.net


