
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
实际上,除了辅助表以外,GWR还会生成一份全要素的表。对回归的每一个样本都给出相应的信息,今天就来看看这些信息代表了什么内容。
生成的新的要素类字段信息如下:

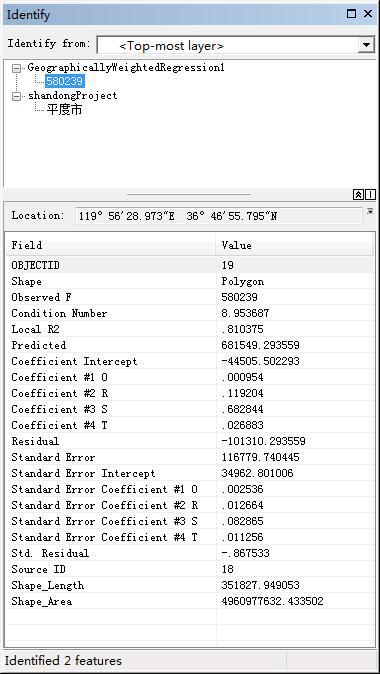
实际上,Coeffcient(系数)和Standard Error Conffcient (标准差系数)会对每一个解释变量都给出一个值,所以可以看成是两类值,下面把各个值的情况和意义做个简单描述:
其中ArcGIS要素类的标准模板字段:OJBECTID、Shape、Shape_Length、Shape_Area 略过。
Observed F
因变量的观测值,实际上这个值就是直接从原始数据中的因变量字段的值。
Condition Number
条件数:这个数值用于此诊断评估局部多重共线性。存在较强局部多重共线性的情况下,结果将变得不稳定。所以这里如果出现了大于 30 的条件数相关联,那么的结果就可能是不可靠的。
Local R2
局部的R2,与全局R2的意义是一样的,范围在 0.0 与 1.0 之间,表示局部回归模型与观测所得 y 值的拟合程度。如果值非常低,则表示局部模型性能不佳。对 Local R2进行地图可视化,可以查看哪些位置 GWR 预测较准确和哪些位置不准确。以便为获知可能在回归模型中丢失的重要变量提供相关线索。
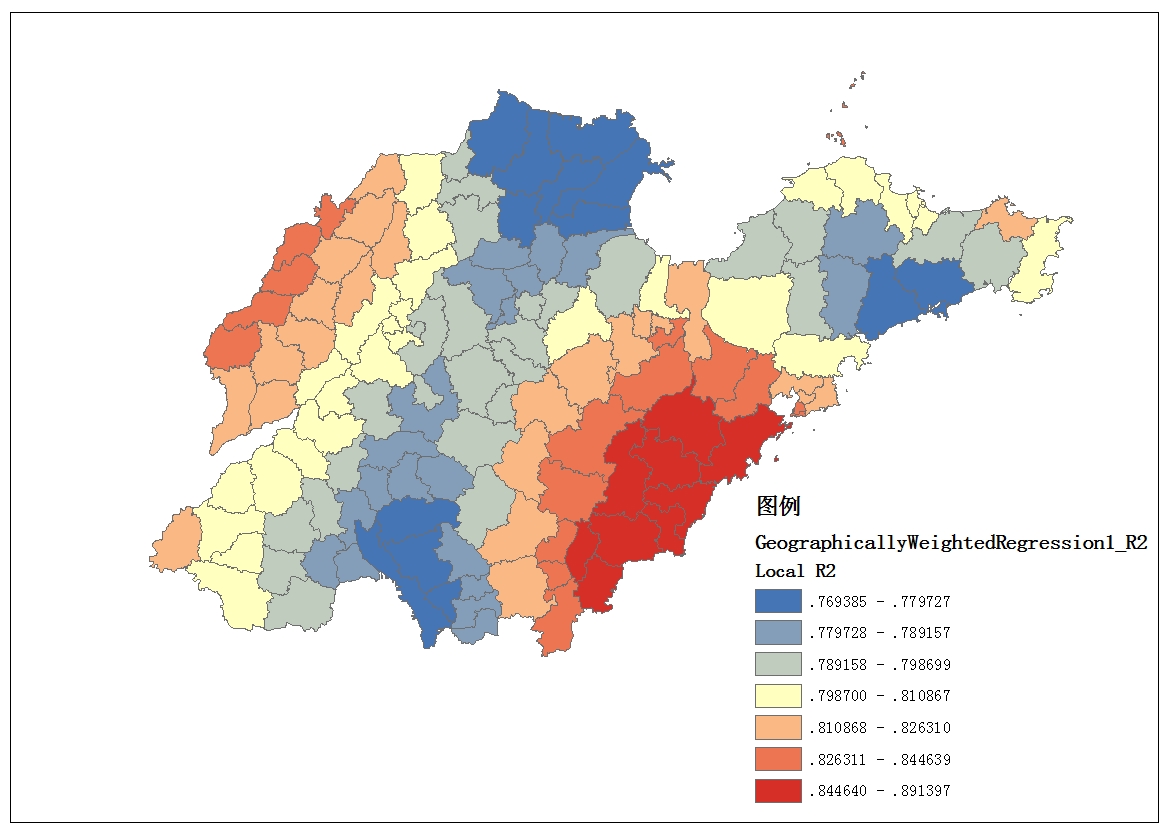
从上面的可视化结果可以看出,采用GWR分析的出来的结果,R2的值相当的高。而且出现的明显的聚集趋势。
Predicted
对因变量的预测值:这些值是由 GWR 计算所得的估计(或拟合)y 值。这个值一般用来和因变量进行对比,越接近,表示拟合度越高。
Coefficient Intercept
截距:与Y轴的交点,这里的截距为负,表示观测值小于预测值。
Coefficient
各样本的各个自变量的系数。GWR的特点就在这里,不同于OLS,GWR会给出每个位置每个自变量的系数。
Residual
残差,就是观测值与预测值的差。
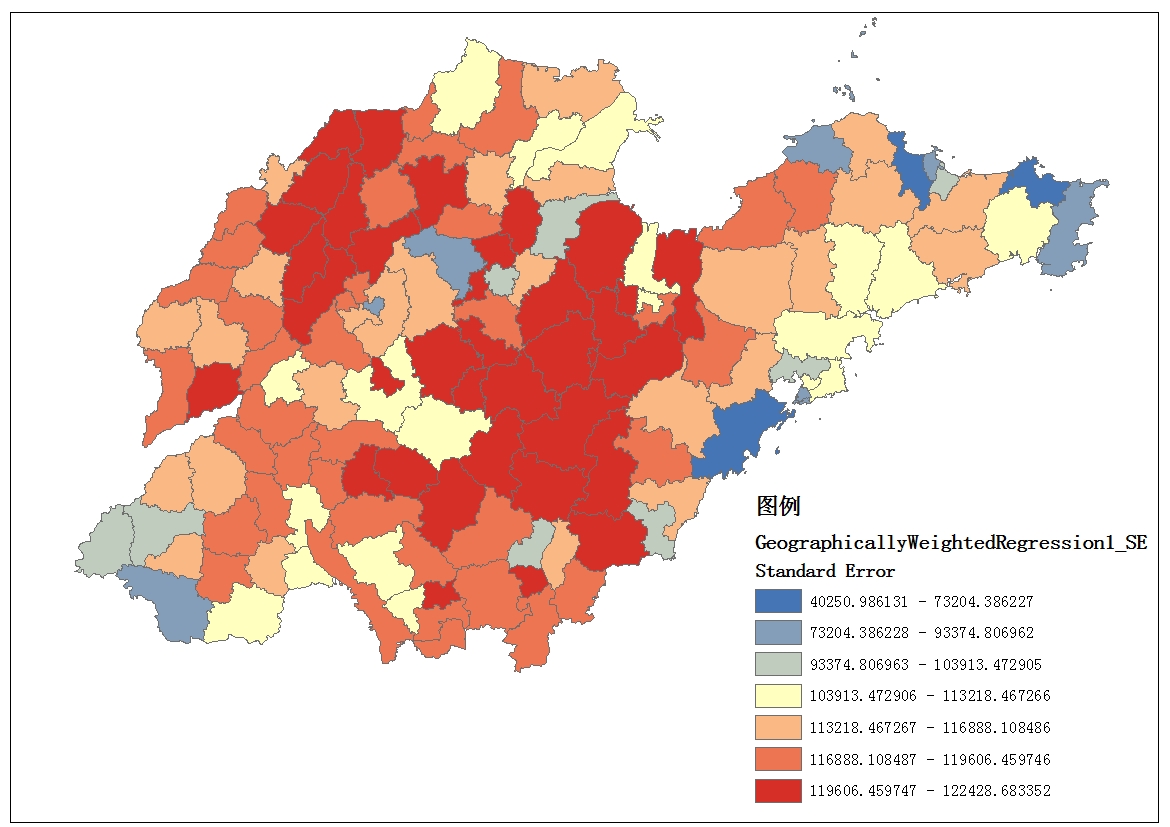
Standard Error
标准误(注意:(“标准误”是一个统计学术语,不算虾神我打错字了。)不是标准差,标准差的英文是:standard deviation):衡量的是我们在用样本统计量去推断相应的总体参数(常见如均值、方差等)的时候,一种估计的精度。
Standard Error Intercept
标准误的截距:标准差与Y轴的交点。
Standard Error Coefficient
各自变量系数标准误:参考标准误的解释。在这里,这些值用于衡量每个系数估计值的可靠性。标准误与实际系数值相比较小时,这些估计值的可信度会更高。较大标准误差可能表示局部多重共线性存在问题。
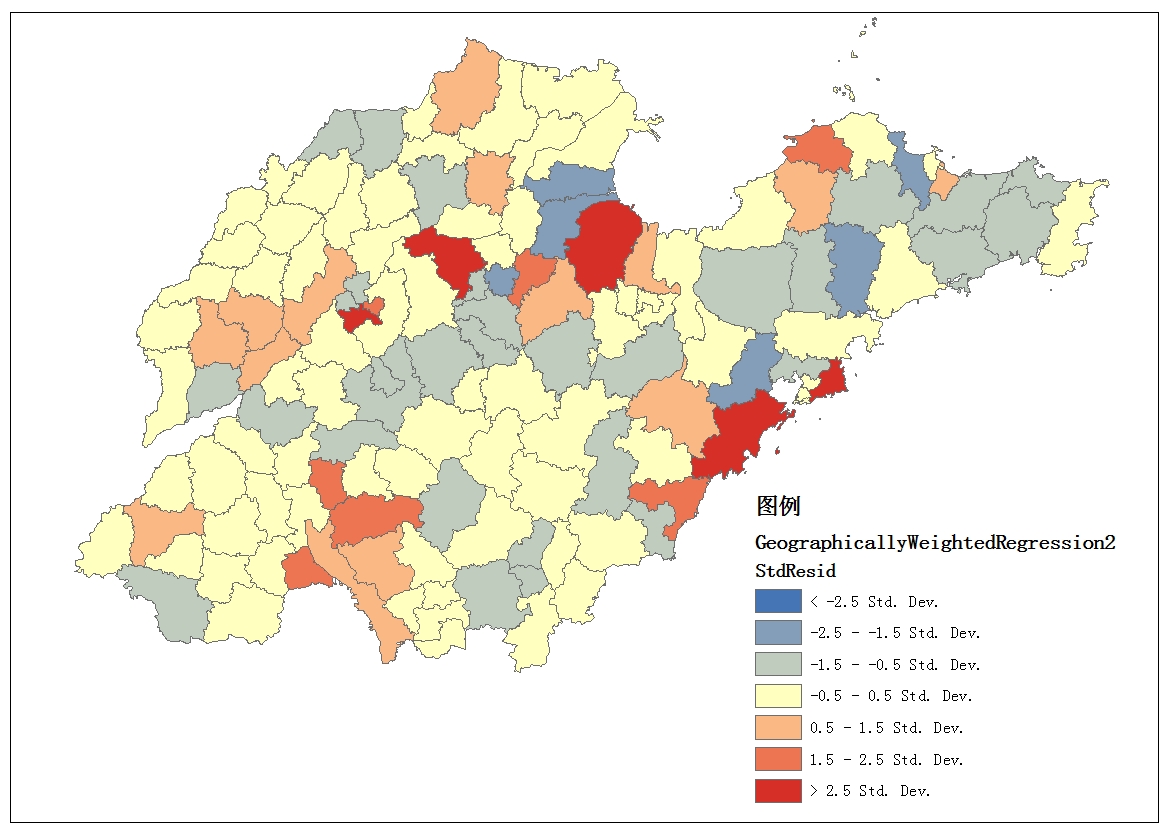
Std. Residual
标准化残差:这个值也是ArcGIS进行GWR分析之后,给出的默认可视化结果。标准化残差的平均值为零,标准差为 1。在 ArcMap 中执行 GWR 时,将自动将标准化残差渲染为由冷色到暖色渲染的地图。官方说法是,请检查超过2.5倍标准化残差的地方,这些地方可能是有问题。
到此为止,GWR所有的结果解读就介绍完成了。下一节开始,介绍GWR的扩展分析。
待续未完。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/189020.html原文链接:https://javaforall.net


