
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE稳定放心使用
伽马校正
问题描述:读取图像,然后对图像进行伽玛校正。
伽马校正
这里是一篇写伽马校正比较好的文章,我觉得可以作为背景知识补充。
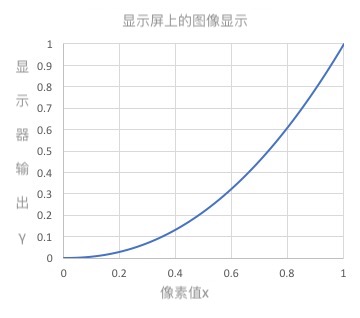
伽马校正用来对照相机等电子设备传感器的非线性光电转换特性进行校正。如果图像原样显示在显示器等上,画面就会显得很暗。伽马校正通过预先增大 RGB 的值来排除显示器的影响,达到对图像修正的目的。
由于下式引起非线性变换,在该式中, x x x被归一化,限定在 [ 0 , 1 ] [0,1] [0,1]范围内。 c c c是常数, g g g为伽马变量(通常取 2.2 2.2 2.2):
x ′ = c I i n g x’ = c\ {I_{in}}^ g x′=c Iing
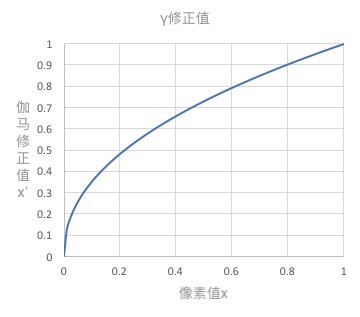
因此,使用下面的式子进行伽马校正:
I o u t = 1 c I i n 1 g I_{out} ={\frac{1}{c}\ I_{in}} ^ {\frac{1}{g}} Iout=c1 Iing1
| 显示屏上的图像显示 | γ \gamma γ修正值 |
|---|---|
  |
 |
#include <opencv2/core.hpp>
#include <opencv2/highgui.hpp>
#include <math.h>
cv::Mat gamma_correction(cv::Mat img, double c, double g)
{
int row = img.rows;
int col = img.cols;
int channel = img.channels();
cv::Mat new_image = cv::Mat::zeros(row, col, CV_8UC3);
double val;
// gamma_correction
for (int i = 0; i < row; i++)
{
for (int j = 0; j < col; j++)
{
for (int chan = 0; chan < channel; chan++)
{
val = (double)img.at<cv::Vec3b>(i, j)[chan] / 255;
new_image.at<cv::Vec3b>(i, j)[chan] = (uchar)(pow(val / c, 1 / g) * 255);
}
}
}
return new_image;
}
int main(){
// read image
cv::Mat img = cv::imread("../imori_gamma.jpeg", cv::IMREAD_COLOR);
// histogram_normalization
cv::Mat new_image = gamma_correction(img, 1, 2.2);
cv::imwrite("../1-10/imori_gamma_correction.jpeg", new_image);
cv::imshow("vv", new_image);
cv::waitKey(0);
cv::destroyAllWindows();
return 0;
}
| 输入图像 (imori_dark.jpeg) | 输出图像 (histogram_transform.jpeg) |
|---|---|
 |
 |
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/189703.html原文链接:https://javaforall.net


