
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
克莱姆法则(由线性方程组的系数确定方程组解的表达式)是线性代数中一个关于求解线性方程组的定理,它适用于变量和方程数目相等的线性方程组。
概念
含有n个未知数的线性方程组称为n元线性方程组。
1)当其右端的常数项b1,b2,…,bn不全为零时,称为非齐次线性方程组:
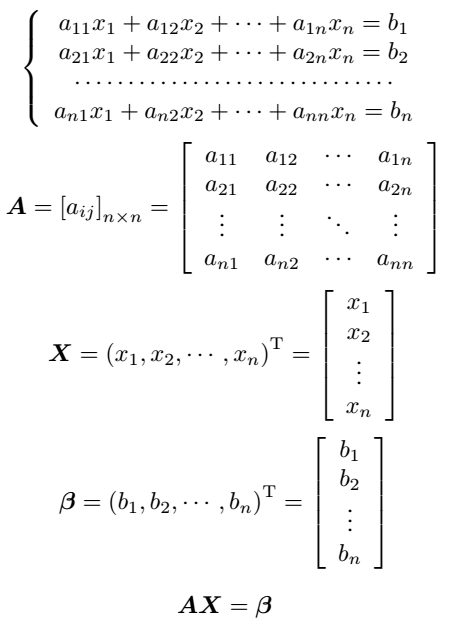

其中,A是线性方程组的系数矩阵,X是由未知数组成的列向量,β是由常数项组成的列向量。
非齐次线性方程组的矩阵形式:
2)当常数项全为零时,称为齐次线性方程组,即:
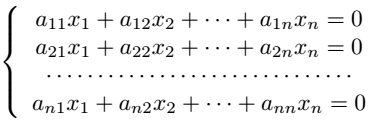
其矩阵形式:
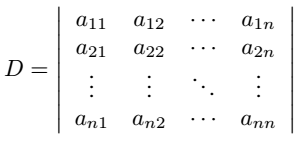
3)系数构成的行列式称为该方程组的系数行列式D,即
定理
记法1:若线性方程组的系数矩阵A可逆(非奇异),即系数行列式 D≠0。有唯一解,其解为

记法2:若线性方程组的系数矩阵A可逆(非奇异),即系数行列式 D≠0,则线性方程组有唯一解,其解为
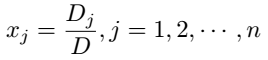
其中Dj是把D中第j列元素对应地换成常数项而其余各列保持不变所得到的行列式,即
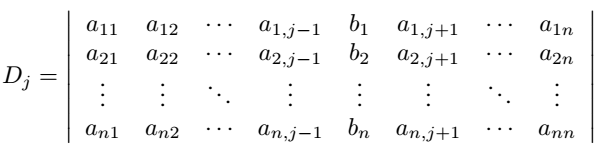
记法1是将解写成矩阵(列向量)形式,而记法2是将解分别写成数字,本质相同。
推论
1)n元齐次线性方程组有唯一零解的充要条件是系数行列式不等于零,系数矩阵可逆(矩阵可逆=矩阵非奇异=矩阵对应的行列式不为0=满秩=行列向量线性无关);
2)n元齐次线性方程组有非零解的充要条件是系数行列式等于零。
法则总结
1.克莱姆法则的重要理论价值:
1)研究了方程组的系数与方程组解的存在性与唯一性关系;
2)与其在计算方面的作用相比,克莱姆法则更具有重大的理论价值。(一般没有计算价值,计算量较大,复杂度太高)
2.应用克莱姆法则判断具有N个方程、N个未知数的线性方程组的解:
1)当方程组的系数行列式不等于零时,则方程组有解,且具有唯一的解;
2)如果方程组无解或者有两个不同的解,那么方程组的系数行列式必定等于零;
3)克莱姆法则不仅仅适用于实数域,它在任何域上面都可以成立。
3.克莱姆法则的局限性:
1)当方程组的方程个数与未知数的个数不一致时,或者当方程组系数的行列式等于零时,克莱姆法则失效;
2)运算量较大,求解一个N阶线性方程组要计算N+1个N阶行列式。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/194536.html原文链接:https://javaforall.net


