
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
超声波雷达听着很陌生,但其实一直被广泛使用在倒车上,与毫米波雷达不同的是:超声波能被任何材质的障碍物反射,毫米波只能被金属物体反射,超声波雷达的探测距离又很近,到底工作原理是什么,下面我带大家一起来来看看。
1. 工作原理
超声波雷达的工作原理是通过超声波发射装置向外发出超声波,到通过接收器接收到发送过来超声波时的时间差来测算距离。常用探头的工作频率有 40kHz, 48kHz 和 58kHz 三种。一般来说,频率越高,灵敏度越高,但水平与垂直方向的探测角度就越小,故一般采用 40kHz 的探头。超声波雷达防水、防尘,即使有少量的泥沙遮挡也不影响。探测范围在 0.1-3 米之间,而且精度较高,因此非常适合应用于泊车。

超声波雷达的测距原理和之前介绍的激光雷达、毫米波雷达类似,距离=传播速度*传播时间/2。不同的是激光雷达和毫米波雷达的波速都为光速,而超声波雷达的波速跟温度有关。近似关系如下:
C = C0 + 0.607 ∗ T,C0为零度时的声波速度332m/s,T为温度(单位:℃)。
例如,温度在0℃时,超声波的传播速度为332m/s;温度在30℃时,超声波的传播速度为350m/s。相同相对位置的障碍物,在不同温度的情况下,测量的距离不同。对传感器精度要求极高的自动驾驶系统来说,要么选择将超声波雷达的测距进行保守计算;要么将温度信息引入自动驾驶系统,提升测量精度。
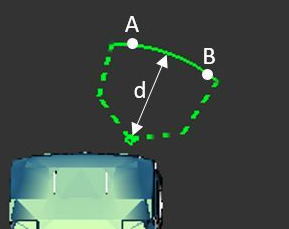
超声波雷达在工作时会返回一个探测距离的值,如图所示。处于A处和处于B处的障碍物都会返回相同的探测距离d。所以在仅知道探测距离d的情况下,通过单个雷达的信息是无法确定障碍物是在A处还是在B处的。
2. 类型
常见的超声波雷达有两种。第一种是安装在汽车前后保险杠上的,也就是用于测量汽车前后障碍物的倒车雷达,这种雷达业内称为UPA;第二种是安装在汽车侧面的,用于测量侧方障碍物距离的超声波雷达,业内称为APA。UPA和APA的探测范围和探测区域都太相同。
UPA超声波雷达的探测距离一般在15~250cm之间,主要用于测量汽车前后方的障碍物。APA超声波雷达的探测距离一般在30~500cm之间。APA的探测范围更远,因此相比于UPA成本更高,功率也更大。如图为单个APA的探测范围示意图。APA的探测距离优势让它不仅能够检测左右侧的障碍物,而且还能根据超声波雷达返回的数据判断停车库位是否存在。
3. 优势与劣势
- 优势:超声波的能量消耗较缓慢,在介质中传播的距离比较远,穿透性强,测距的方法简单,成本低。
- 劣势:超声波雷达在速度很高情况下测量距离有一定的局限性,这是因为超声波的传输速度很容易受天气情况的影响,在不同的天气情况下,超声波的传输速度不同,而且传播速度较慢,当汽车高速行驶时,使用超声波测距无法跟上汽车的车距实时变化,误差较大。另一方面,超声波散射角大,方向性较差,在测量较远距离的目标时,其回波信号会比较弱,影响测量精度。但是,在短距离测量中,超声波测距传感器具有非常大的优势。
4. 相关企业
- 博世公司;博世公司有超声波雷达、倒车雷达、半自动泊车、全自动泊车,超声波雷达增加整个探测范围,提高刷新时间,每一个超声波雷达有一个代码,避免超声波雷达有噪音,可以更加精准。第六代超声波雷达可以很好的识别第五代产品无法识别的低矮物体。博世车用超声波传感器的检测范围为20~450厘米。
- 法雷奥;法雷奥的超声波雷达已经有十年的量产经验,短距超声波雷达覆盖范围为(2-4m)。其最新一代的自动泊车系统Park4U,就是基于超声波雷达,有平行与转角的两种泊车模式。车身前后只需留出40厘米的空间,该系统就能够自动完成泊车过程。其客户有路虎、起亚、大众途安等众多OEM厂商。
- 同致电子;同致电子主要生产有汽车倒车雷达、遥控中控、后视摄像头、智能车内后视镜等产品,是国内各大汽车厂(如上海通用、上海大众、东风日产、上海汽车、神龙汽车、奇瑞汽车、吉利汽车、福特汽车等)的供应商,也是目前亚洲倒车雷达OEM市场第一供应商。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/194863.html原文链接:https://javaforall.net


