
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
ROS安装教程
一、ROS配置
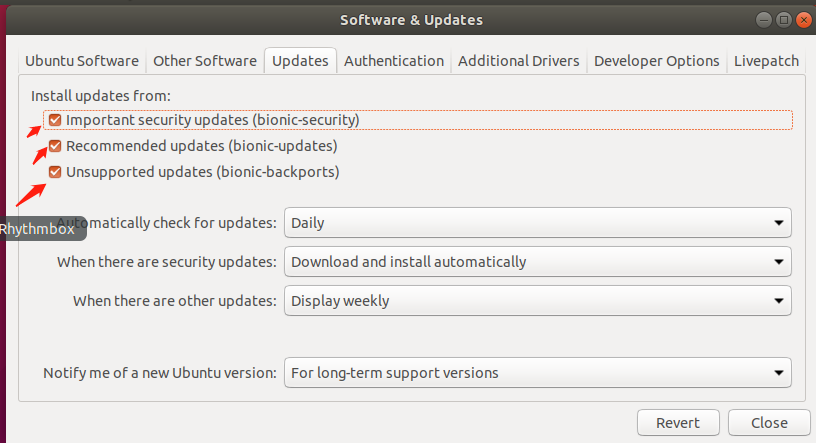
1 配置Ubuntu软件仓库
打开“软件和更新”,将ubuntu software和updates改成如下形式:


2 开始安装
#1 设置sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
#2 设置密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
#3 更新包索引
sudo apt update
#4 下载桌面完整版(推荐)
sudo apt install ros-melodic-desktop-full
#5 初始化 rosdep
sudo rosdep init
rosdep update
#6 设置环境
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
#7 安装rosinstall这个工具和其他构建ROS包的依赖项,轻松地从一个命令下载许多 ROS 包的源树
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
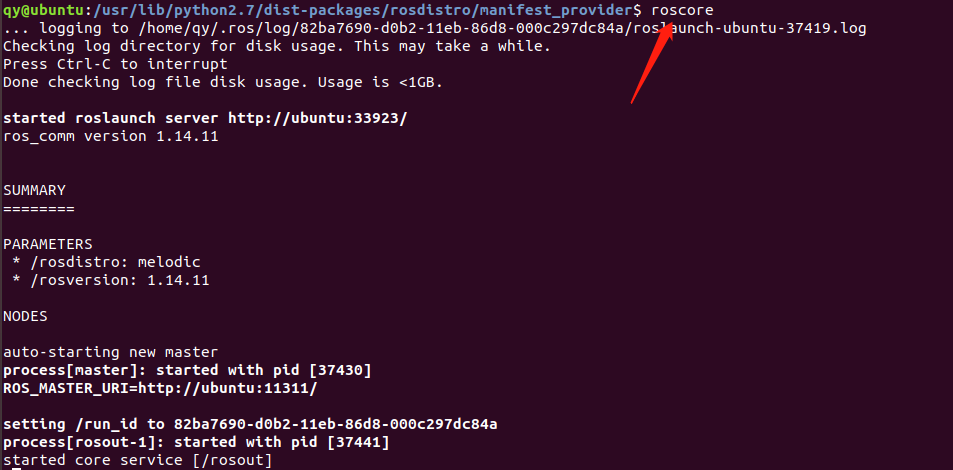
3 测试
roscore
二、遇到的问题
1 ROS无法下载问题
1.打开软件和更新
2.将源改为“main server”
3.更新全打开
2 sudo: rosdep: command not found

解决方案:
sudo apt install python-rosdep
结果:

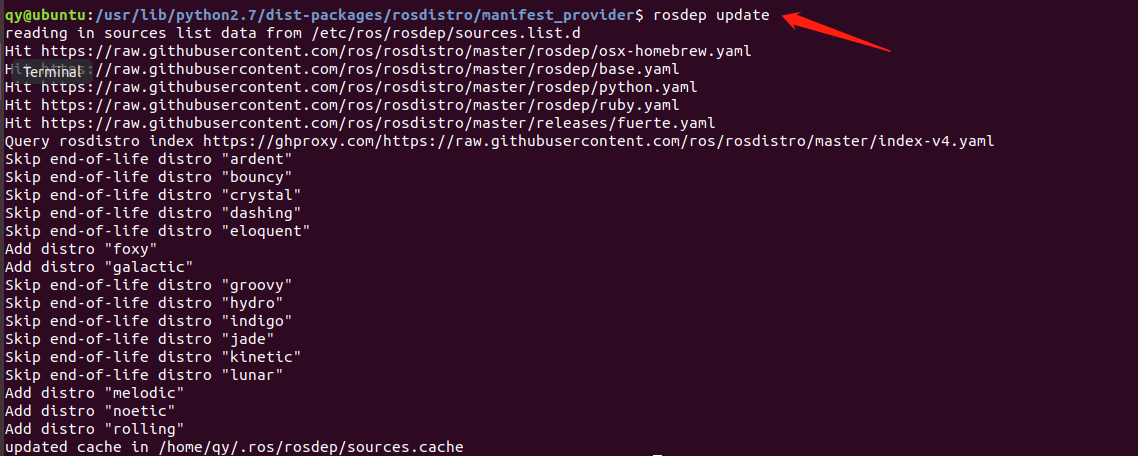
3 rosdep update
问题:

解决方案:添加 “https://ghproxy.com/” 。解释传送门
具体步骤:
#1 进入rosdep2目录
cd /usr/lib/python2.7/dist-packages/rosdep2/
#2 打开sources_list.py
sudo gedit sources_list.py
(1)将DEFAULT_SOURCES_LIST_URL 改为'https://ghproxy.com/https://raw.githubusercontent.com/ ros/rosdistro/master/rosdep/sources.list.d/20-default.list' # 在72行
(2)在download_rosdep_data(url)函数中加入:
url="https://ghproxy.com/"+url #在310行,try之后,if之前
#3 打开 gbpdistro_support.py
sudo gedit gbpdistro_support.py #第36行,加入“https://ghproxy.com/”代理前缀
#4 打开 rep3.py
sudo gedit rep3.py #第39行,加入“https://ghproxy.com/”代理前缀
#5 切换至rosdistro目录
cd ../rosdistro
#6 打开__init__.py,改DEFAULT_INDEX_URL
sudo gedit __init__.py #第68行,加入“https://ghproxy.com/”代理前缀
#7 进入manifest_provider目录,为github.py添加前缀
cd manifest_provider
sudo gedit github.py #68行 119行
#8 然后就可以
rosdep update
结果:
3 roscore 无法运行
解决方案:
sudo apt install python-roslaunch
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/195196.html原文链接:https://javaforall.net

![C++ 虚函数表解析[通俗易懂]](https://javaforall.net/wp-content/uploads/2020/11/2020110817443450-480x300.jpg)
