
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
ROS是机器人操作系统(Robot Operating System)的英文缩写,源自斯坦福的开源项目。 Ubuntu16.04只能安装ROS Lunar Loggerhead或ROS Kinetic Kame
依次完成以下四步.
第四步提示是否不验证,需输入y ,等待安装完成
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full如果安装错误以下方法卸载ROS,修改Ubuntu的系统设置。
sudo apt-get purge ros-*
sudo rm -rf /etc/ros软件更新源指定阿里巴巴源,然后再尝试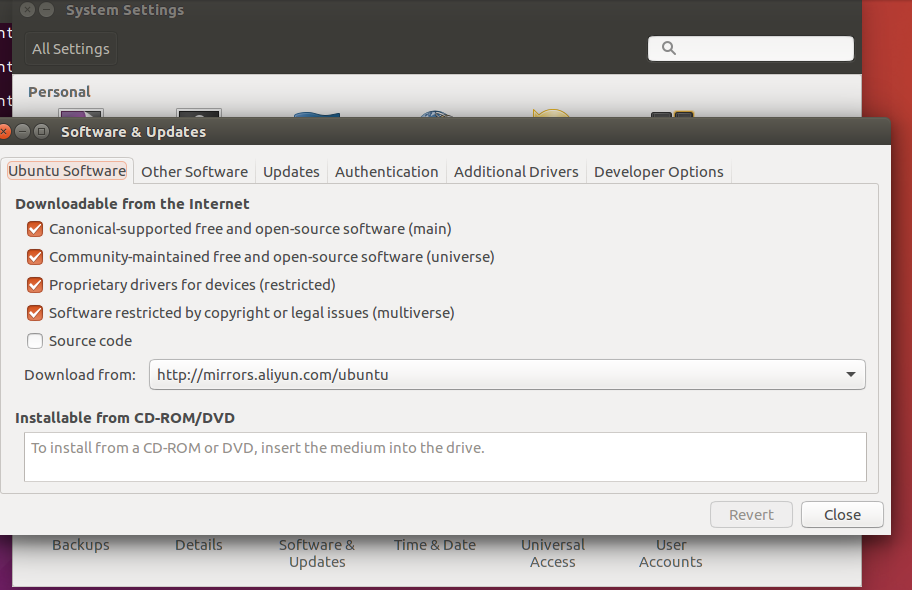

更新,
sudo rosdep init
rosdep update 一般会出错,ERROR: cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
打开站长工具网站,查IP
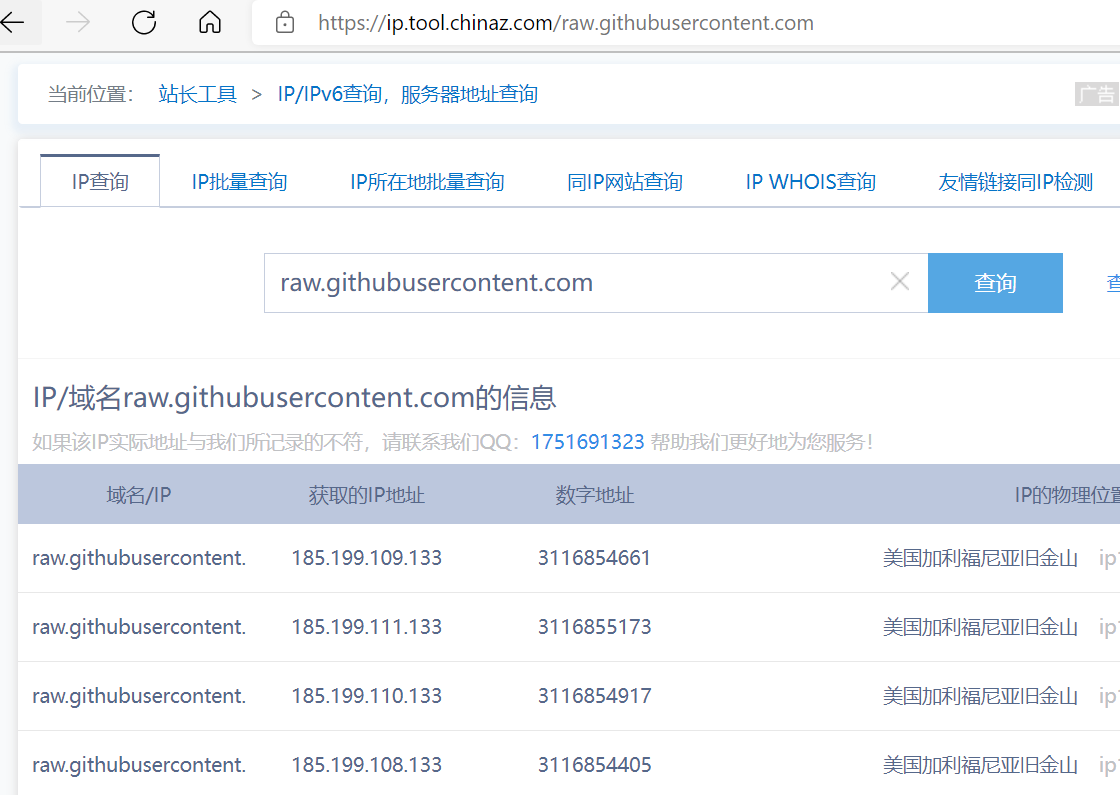
(我怀疑被墙了,但是我没有证据)
sudo gedit /etc/hosts添加
185.199.110.133 raw.githubusercontent.com然后再执行
sudo rosdep init
不稳定,但是还是成功生成/etc/ros/rosdep/sources.list.d/20-default.list 文件
rosdep update
这一步,试了一百来次,始终没有完全迈过墙,一万只羊驼。现在,解决rosdep update出错
下载rosdistro包到~
git clone https://github.com/ros/rosdistro.git
修改本地更新
gedit /etc/ros/rosdep/sources.list.d/20-default.list
# os-specific listings first
#yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml osx
yaml file:///home/lee/rosdistro/rosdep/osx-homebrew.yaml osx
# generic
#yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
#yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
#yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
#gbpdistro https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml fuerte
yaml file:///home/lee/rosdistro/rosdep/base.yaml
yaml file:///home/lee/rosdistro/rosdep/python.yaml
yaml file:///home/lee/rosdistro/rosdep/ruby.yaml
#gbpdistro file:///home/lee/rosdistro/releases/fuerte.yaml fuerte
gbpdistro https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead上面改完了,还要从国外源下载一个文件,运气不会,试了几次都没成功,继续修改。
gedit /usr/lib/python2.7/dist-packages/rosdistro/__init__.py

再次rosdep update ,从本地更新成功 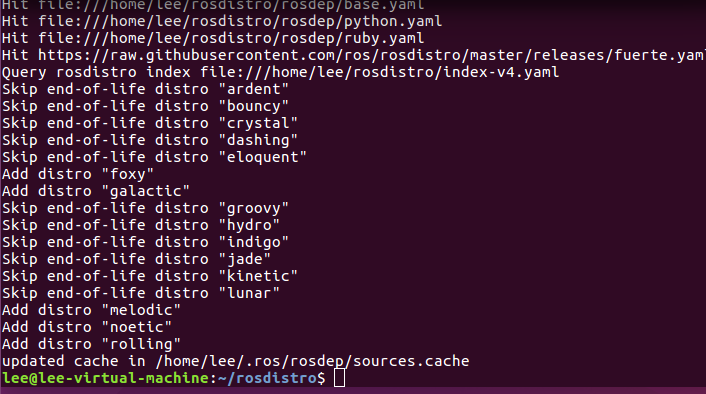
设置环境变量
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc安装rosinstall,便利的工具
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
使用下面命令安装ROS插件(包括3D包围框)
sudo apt install ros-kinetic-jsk-rviz-plugins
最后
roscore如图表示成功 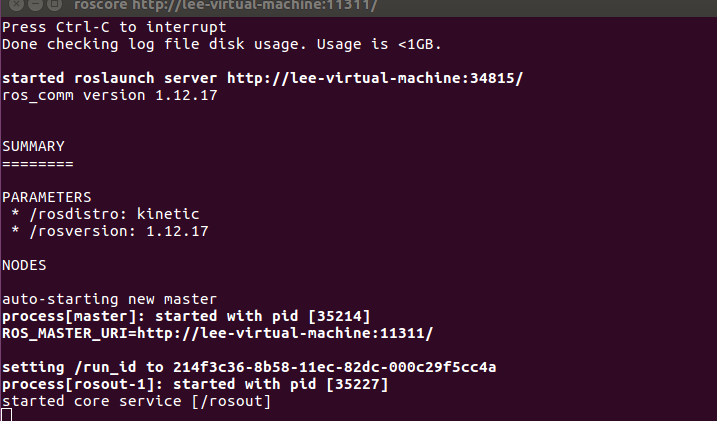
新开一个终端,rosrun turtlesim turtlesim_node
再开一个终端玩小乌龟游戏, rosrun turtlesim turtle_teleop_key
输入rqt_graph
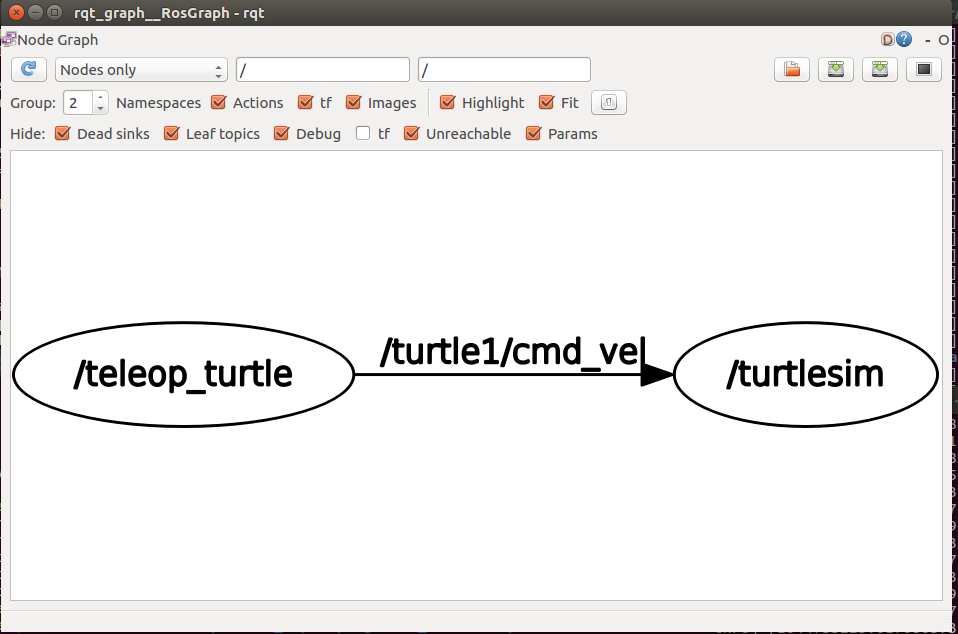 下一篇文章,我们写C++代码,模拟teleop_turtle发布数据让小乌龟自己动起来
下一篇文章,我们写C++代码,模拟teleop_turtle发布数据让小乌龟自己动起来
ROS开发小乌龟自动爬行与实时位姿获取_lhb0709的专栏-CSDN博客
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/195386.html原文链接:https://javaforall.net


