
大家好,又见面了,我是你们的朋友全栈君。如果您正在找激活码,请点击查看最新教程,关注关注公众号 “全栈程序员社区” 获取激活教程,可能之前旧版本教程已经失效.最新Idea2022.1教程亲测有效,一键激活。
Jetbrains全系列IDE使用 1年只要46元 售后保障 童叟无欺
ubuntu 安装wine qq教程
小编装了真机,传文件是在麻烦,所以自己百度了好多办法,终于安装上了qq
1. 下载好这个版本的qq (各大网站都有,自己百度就可以了)

2. 然后在ubuntu ,用解压软件 归档管理器打开并提取。
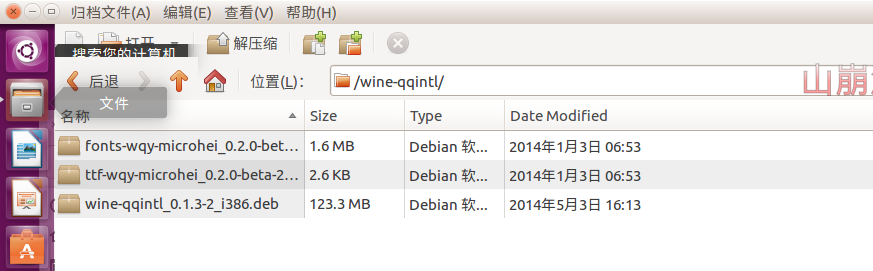
3. 然后逐次安装三个包。
安装方法:可以用ubuntu自带的软件安装器安装(16.04好像不能用,我也不知道为啥,还有一种方法,用命令安装 在你提取的那个文件夹空白处右击打开终端 用命令:
sudo dpkg -i *.deb) 三个包安装完成之后,qq就安装完成了,安装wineqq包的时候会出现依赖问题,大家不需要管,三个包安装完成后,按 windows键,在搜索界面搜索 “qq”,就出现大家期待已久的 国际通用板qq!(若是没有出现大家可以重新启动系统)

Qq是2012 很low,安装TIM正在研究中!
有需要安装包的可以加我的qq1226337916.
版权声明:本文内容由互联网用户自发贡献,该文观点仅代表作者本人。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如发现本站有涉嫌侵权/违法违规的内容, 请联系我们举报,一经查实,本站将立刻删除。
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/197343.html原文链接:https://javaforall.net


