
转载自小一休哥的文章:http://blog.csdn.net/_/article/details/
目前,学习与开发FPGA的程序员们大多使用的是Verilog HDL语言(以下简称为Verilog),关于Verilog的诸多优点一休哥就不多介绍了,在此,我们将重点放在Verilog的运算操作上。
一、CORDIC的基本原理介绍
1、CORDIC的几何原理介绍
2、CORDIC的优化算法介绍
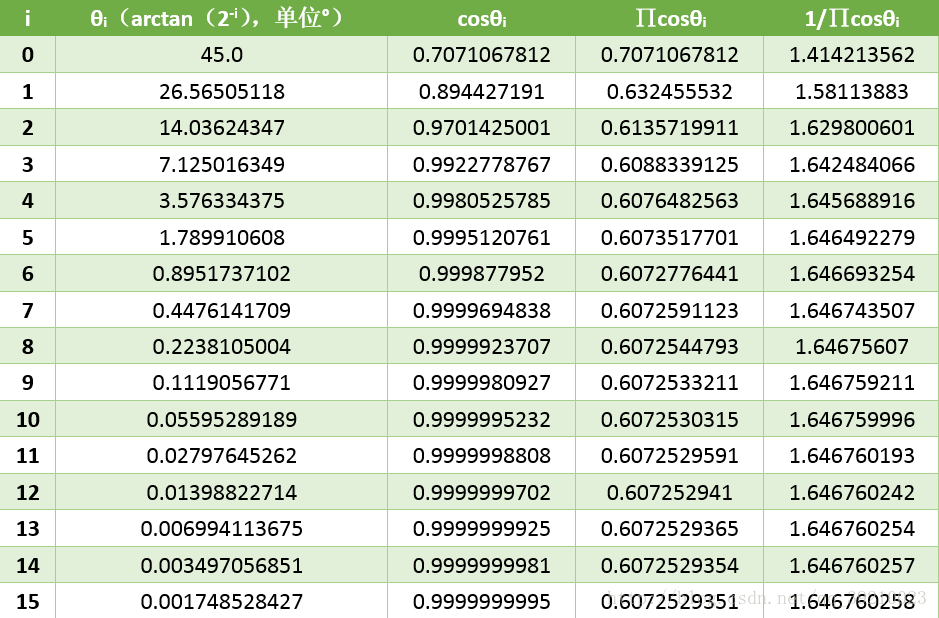
close all; clear; clc; % 初始化 die = 16;%迭代次数 jiao = zeros(die,1);%每次旋转的角度 cos_value = zeros(die,1);%每次旋转的角度的余弦值 K = zeros(die,1);%余弦值的N元乘积 K_1 = zeros(die,1);%余弦值的N元乘积的倒数 for i = 1 : die a = 2^(-(i-1)); jiao(i) = atan(a); cos_value(i) = cos(jiao(i)); if( i == 1) K(i) = cos_value(i); K_1(i) = 1/K(i); else K(i) = K(i-1)*cos_value(i); K_1(i) = 1/K(i); end end jiao = vpa(rad2deg(jiao)*256,10) cos_value = vpa(cos_value,10) K = vpa(K,10) K_1 = vpa(K_1,10)这里写图片描述

从上表也可以看出,当迭代次数为16,i=15时,cosθi的值已经非常趋近于1了,∏cosθi的值则约等于0.607253,1/∏cosθi为1.64676。所以当迭代次数等于16时,通过迭代得到的点Pn坐标已经非常接近之前假设中的点Pn。所以,当迭代次数等于16时,这个式子是成立的。
xn = 1/∏cosθi(x0cosθ – y0sinθ),(其中i从0至n-1)
yn = 1/∏cosθi(y0cosθ + x0sinθ),(其中i从0至n-1)
此时,已知条件有三个x0、y0和θ。通过16次迭代,我们可以得到xn和yn。而式中的∏cosθi是个随i变化的值,我们可以预先将其值存入系统中。
然后,我们人为设置x0 = ∏cosθi,y0 = 0,则根据等式,xn = cosθ,yn = sinθ。其中1/∏cosθi的值我们也同样预先存入系统中。如此,我们就实现了正弦和余弦操作了。
二、CORDIC的具体操作流程介绍
1、CORDIC的旋转模式
close all; clear; clc; % 初始化 die = 16;%迭代次数 x = zeros(die+1,1); y = zeros(die+1,1); z = zeros(die+1,1); x(1) = 0.;%初始设置 z(1) = pi/4;%待求角度θ %迭代操作 for i = 1:die if z(i) >= 0 d = 1; else d = -1; end x(i+1) = x(i) - d*y(i)*(2^(-(i-1))); y(i+1) = y(i) + d*x(i)*(2^(-(i-1))); z(i+1) = z(i) - d*atan(2^(-(i-1))); end cosa = vpa(x(17),10) sina = vpa(y(17),10) c = vpa(z(17),10)2、CORDIC的向量模式
close all; clear; clc; % 初始化 die = 16;%迭代次数 x = zeros(die+1,1); y = zeros(die+1,1); z = zeros(die+1,1); x(1) = 100;%初始设置 y(1) = 200;%初始设置 k = 0.;%初始设置 %迭代操作 for i = 1:die if y(i) >= 0 d = -1; else d = 1; end x(i+1) = x(i) - d*y(i)*(2^(-(i-1))); y(i+1) = y(i) + d*x(i)*(2^(-(i-1))); z(i+1) = z(i) - d*atan(2^(-(i-1))); end d = vpa(x(17)*k,10) a = vpa(y(17),10) c = vpa(rad2deg(z(17)),10)三、CORDIC的旋转模式——Verilog仿真
module Cordic_Test ( CLK_50M,RST_N, Phase, Sin,Cos,Error ); input CLK_50M; input RST_N; input [31:0] Phase; output [31:0] Sin; output [31:0] Cos; output [31:0] Error; `define rot0 32'd //45度*2^16 `define rot1 32'd //26.5651度*2^16 `define rot2 32'd //14.0362度*2^16 `define rot3 32'd //7.1250度*2^16 `define rot4 32'd //3.5763度*2^16 `define rot5 32'd //1.7899度*2^16 `define rot6 32'd58688 //0.8952度*2^16 `define rot7 32'd29312 //0.4476度*2^16 `define rot8 32'd14656 //0.2238度*2^16 `define rot9 32'd7360 //0.1119度*2^16 `define rot10 32'd3648 //0.0560度*2^16 `define rot11 32'd1856 //0.0280度*2^16 `define rot12 32'd896 //0.0140度*2^16 `define rot13 32'd448 //0.0070度*2^16 `define rot14 32'd256 //0.0035度*2^16 `define rot15 32'd128 //0.0018度*2^16 parameter Pipeline = 16; parameter K = 32'h09b74; //K=0.*2^16,32'h09b74, reg signed [31:0] Sin; reg signed [31:0] Cos; reg signed [31:0] Error; reg signed [31:0] x0=0,y0=0,z0=0; reg signed [31:0] x1=0,y1=0,z1=0; reg signed [31:0] x2=0,y2=0,z2=0; reg signed [31:0] x3=0,y3=0,z3=0; reg signed [31:0] x4=0,y4=0,z4=0; reg signed [31:0] x5=0,y5=0,z5=0; reg signed [31:0] x6=0,y6=0,z6=0; reg signed [31:0] x7=0,y7=0,z7=0; reg signed [31:0] x8=0,y8=0,z8=0; reg signed [31:0] x9=0,y9=0,z9=0; reg signed [31:0] x10=0,y10=0,z10=0; reg signed [31:0] x11=0,y11=0,z11=0; reg signed [31:0] x12=0,y12=0,z12=0; reg signed [31:0] x13=0,y13=0,z13=0; reg signed [31:0] x14=0,y14=0,z14=0; reg signed [31:0] x15=0,y15=0,z15=0; reg signed [31:0] x16=0,y16=0,z16=0; reg [ 1:0] Quadrant [Pipeline:0]; always @ (posedge CLK_50M or negedge RST_N) begin if(!RST_N) begin x0 <= 1'b0; y0 <= 1'b0; z0 <= 1'b0; end else begin x0 <= K; y0 <= 32'd0; z0 <= Phase[15:0] << 16; end end always @ (posedge CLK_50M or negedge RST_N) begin if(!RST_N) begin x1 <= 1'b0; y1 <= 1'b0; z1 <= 1'b0; end else if(z0[31]) begin x1 <= x0 + y0; y1 <= y0 - x0; z1 <= z0 + `rot0; end else begin x1 <= x0 - y0; y1 <= y0 + x0; z1 <= z0 - `rot0; end end always @ (posedge CLK_50M or negedge RST_N) begin if(!RST_N) begin x2 <= 1'b0; y2 <= 1'b0; z2 <= 1'b0; end else if(z1[31]) begin x2 <= x1 + (y1 >>> 1); y2 <= y1 - (x1 >>> 1); z2 <= z1 + `rot1; end else begin x2 <= x1 - (y1 >>> 1); y2 <= y1 + (x1 >>> 1); z2 <= z1 - `rot1; end end always @ (posedge CLK_50M or negedge RST_N) begin if(!RST_N) begin x3 <= 1'b0; y3 <= 1'b0; z3 <= 1'b0; end else if(z2[31]) begin x3 <= x2 + (y2 >>> 2); y3 <= y2 - (x2 >>> 2); z3 <= z2 + `rot2; end else begin x3 <= x2 - (y2 >>> 2); y3 <= y2 + (x2 >>> 2); z3 <= z2 - `rot2; end end always @ (posedge CLK_50M or negedge RST_N) begin if(!RST_N) begin x4 <= 1'b0; y4 <= 1'b0; z4 <= 1'b0; end else if(z3[31]) begin x4 <= x3 + (y3 >>> 3); y4 <= y3 - (x3 >>> 3); z4 <= z3 + `rot3; end else begin x4 <= x3 - (y3 >>> 3); y4 <= y3 + (x3 >>> 3); z4 <= z3 - `rot3; end end always @ (posedge CLK_50M or negedge RST_N) begin if(!RST_N) begin x5 <= 1'b0; y5 <= 1'b0; z5 <= 1'b0; end else if(z4[31]) begin x5 <= x4 + (y4 >>> 4); y5 <= y4 - (x4 >>> 4); z5 <= z4 + `rot4; end else begin x5 <= x4 - (y4 >>> 4); y5 <= y4 + (x4 >>> 4); z5 <= z4 - `rot4; end end always @ (posedge CLK_50M or negedge RST_N) begin if(!RST_N) begin x6 <= 1'b0; y6 <= 1'b0; z6 <= 1'b0; end else if(z5[31]) begin x6 <= x5 + (y5 >>> 5); y6 <= y5 - (x5 >>> 5); z6 <= z5 + `rot5; end else begin x6 <= x5 - (y5 >>> 5); y6 <= y5 + (x5 >>> 5); z6 <= z5 - `rot5; end end always @ (posedge CLK_50M or negedge RST_N) begin if(!RST_N) begin x7 <= 1'b0; y7 <= 1'b0; z7 <= 1'b0; end else if(z6[31]) begin x7 <= x6 + (y6 >>> 6); y7 <= y6 - (x6 >>> 6); z7 <= z6 + `rot6; end else begin x7 <= x6 - (y6 >>> 6); y7 <= y6 + (x6 >>> 6); z7 <= z6 - `rot6; end end always @ (posedge CLK_50M or negedge RST_N) begin if(!RST_N) begin x8 <= 1'b0; y8 <= 1'b0; z8 <= 1'b0; end else if(z7[31]) begin x8 <= x7 + (y7 >>> 7); y8 <= y7 - (x7 >>> 7); z8 <= z7 + `rot7; end else begin x8 <= x7 - (y7 >>> 7); y8 <= y7 + (x7 >>> 7); z8 <= z7 - `rot7; end end always @ (posedge CLK_50M or negedge RST_N) begin if(!RST_N) begin x9 <= 1'b0; y9 <= 1'b0; z9 <= 1'b0; end else if(z8[31]) begin x9 <= x8 + (y8 >>> 8); y9 <= y8 - (x8 >>> 8); z9 <= z8 + `rot8; end else begin x9 <= x8 - (y8 >>> 8); y9 <= y8 + (x8 >>> 8); z9 <= z8 - `rot8; end end always @ (posedge CLK_50M or negedge RST_N) begin if(!RST_N) begin x10 <= 1'b0; y10 <= 1'b0; z10 <= 1'b0; end else if(z9[31]) begin x10 <= x9 + (y9 >>> 9); y10 <= y9 - (x9 >>> 9); z10 <= z9 + `rot9; end else begin x10 <= x9 - (y9 >>> 9); y10 <= y9 + (x9 >>> 9); z10 <= z9 - `rot9; end end always @ (posedge CLK_50M or negedge RST_N) begin if(!RST_N) begin x11 <= 1'b0; y11 <= 1'b0; z11 <= 1'b0; end else if(z10[31]) begin x11 <= x10 + (y10 >>> 10); y11 <= y10 - (x10 >>> 10); z11 <= z10 + `rot10; end else begin x11 <= x10 - (y10 >>> 10); y11 <= y10 + (x10 >>> 10); z11 <= z10 - `rot10; end end always @ (posedge CLK_50M or negedge RST_N) begin if(!RST_N) begin x12 <= 1'b0; y12 <= 1'b0; z12 <= 1'b0; end else if(z11[31]) begin x12 <= x11 + (y11 >>> 11); y12 <= y11 - (x11 >>> 11); z12 <= z11 + `rot11; end else begin x12 <= x11 - (y11 >>> 11); y12 <= y11 + (x11 >>> 11); z12 <= z11 - `rot11; end end always @ (posedge CLK_50M or negedge RST_N) begin if(!RST_N) begin x13 <= 1'b0; y13 <= 1'b0; z13 <= 1'b0; end else if(z12[31]) begin x13 <= x12 + (y12 >>> 12); y13 <= y12 - (x12 >>> 12); z13 <= z12 + `rot12; end else begin x13 <= x12 - (y12 >>> 12); y13 <= y12 + (x12 >>> 12); z13 <= z12 - `rot12; end end always @ (posedge CLK_50M or negedge RST_N) begin if(!RST_N) begin x14 <= 1'b0; y14 <= 1'b0; z14 <= 1'b0; end else if(z13[31]) begin x14 <= x13 + (y13 >>> 13); y14 <= y13 - (x13 >>> 13); z14 <= z13 + `rot13; end else begin x14 <= x13 - (y13 >>> 13); y14 <= y13 + (x13 >>> 13); z14 <= z13 - `rot13; end end always @ (posedge CLK_50M or negedge RST_N) begin if(!RST_N) begin x15 <= 1'b0; y15 <= 1'b0; z15 <= 1'b0; end else if(z14[31]) begin x15 <= x14 + (y14 >>> 14); y15 <= y14 - (x14 >>> 14); z15 <= z14 + `rot14; end else begin x15 <= x14 - (y14 >>> 14); y15 <= y14 + (x14 >>> 14); z15 <= z14 - `rot14; end end always @ (posedge CLK_50M or negedge RST_N) begin if(!RST_N) begin x16 <= 1'b0; y16 <= 1'b0; z16 <= 1'b0; end else if(z15[31]) begin x16 <= x15 + (y15 >>> 15); y16 <= y15 - (x15 >>> 15); z16 <= z15 + `rot15; end else begin x16 <= x15 - (y15 >>> 15); y16 <= y15 + (x15 >>> 15); z16 <= z15 - `rot15; end end always @ (posedge CLK_50M or negedge RST_N) begin if(!RST_N) begin Quadrant[0] <= 1'b0; Quadrant[1] <= 1'b0; Quadrant[2] <= 1'b0; Quadrant[3] <= 1'b0; Quadrant[4] <= 1'b0; Quadrant[5] <= 1'b0; Quadrant[6] <= 1'b0; Quadrant[7] <= 1'b0; Quadrant[8] <= 1'b0; Quadrant[9] <= 1'b0; Quadrant[10] <= 1'b0; Quadrant[11] <= 1'b0; Quadrant[12] <= 1'b0; Quadrant[13] <= 1'b0; Quadrant[14] <= 1'b0; Quadrant[15] <= 1'b0; Quadrant[16] <= 1'b0; end else begin Quadrant[0] <= Phase[17:16]; Quadrant[1] <= Quadrant[0]; Quadrant[2] <= Quadrant[1]; Quadrant[3] <= Quadrant[2]; Quadrant[4] <= Quadrant[3]; Quadrant[5] <= Quadrant[4]; Quadrant[6] <= Quadrant[5]; Quadrant[7] <= Quadrant[6]; Quadrant[8] <= Quadrant[7]; Quadrant[9] <= Quadrant[8]; Quadrant[10] <= Quadrant[9]; Quadrant[11] <= Quadrant[10]; Quadrant[12] <= Quadrant[11]; Quadrant[13] <= Quadrant[12]; Quadrant[14] <= Quadrant[13]; Quadrant[15] <= Quadrant[14]; Quadrant[16] <= Quadrant[15]; end end always @ (posedge CLK_50M or negedge RST_N) begin if(!RST_N) begin Cos <= 1'b0; Sin <= 1'b0; Error <= 1'b0; end else begin Error <= z16; case(Quadrant[16]) 2'b00: //if the Phase is in first Quadrant,the Sin(X)=Sin(A),Cos(X)=Cos(A) begin Cos <= x16; Sin <= y16; end 2'b01: //if the Phase is in second Quadrant,the Sin(X)=Sin(A+90)=CosA,Cos(X)=Cos(A+90)=-SinA begin Cos <= ~(y16) + 1'b1;//-Sin Sin <= x16;//Cos end 2'b10: //if the Phase is in third Quadrant,the Sin(X)=Sin(A+180)=-SinA,Cos(X)=Cos(A+180)=-CosA begin Cos <= ~(x16) + 1'b1;//-Cos Sin <= ~(y16) + 1'b1;//-Sin end 2'b11: //if the Phase is in forth Quadrant,the Sin(X)=Sin(A+270)=-CosA,Cos(X)=Cos(A+270)=SinA begin Cos <= y16;//Sin Sin <= ~(x16) + 1'b1;//-Cos end endcase end end endmodule 发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/202621.html原文链接:https://javaforall.net


