
随着人工智能与机器人、无人驾驶的火热,深度相机的技术和应用也受到关注,何谓深度相机?
顾名思义,就是可以测量物体到相机的距离(深度)
传统的RGB彩色普通相机称为2D相机,只能拍摄相机视角内的物体,没有物体到相机的距离信息,只能凭感觉感知物体的远近,没有明确的数据
RGB-D深度相机(又称3D相机,其中D代表Depth为深度信息)可获取物体到相机的距离信息,加之2D平面的X,Y坐标,可计算出每个点的三维坐标,以此我们可推断深度相机的应用,如三维重建、目标定位、识别
深度相机分类
目前主流的深度相机有结构光、时间飞行法、双目立体三种
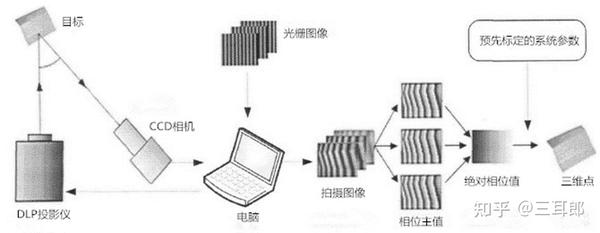
a、结构光深度相机
基本原理:主要硬件有投射仪、相机,通过投射仪主动发射(因此称为主动测量)肉眼不可见IR红外光到被测物体表面,然后通过一个或多个相机拍摄被测物体采集结构光图像,将数据发送到计算单元,通过三角测量原理计算获取位置和深度信息,从而实现3D重建
结构光顾名思义就是将光结构化,有多种投影图案方式,如正弦条纹的相移法、二进制编码的格雷码、相移法+格雷码等

优点
技术成熟,功耗小,成本低
主动投影,适合弱光照使用
近距离(1米内)精度较高,毫米级
缺点
远距离精度差,随着距离的拉长,投影图案变大,精度也随之变差
室外强光照不宜使用,强光容易干扰投影光
代表产品
Kinect1.0,微软官方早已停产,目前市面上多为翻新机、山寨
PrimeSense,3D传感技术鼻祖,苹果13年收购,用于苹果的Face ID,AR应用,人像特效拍摄
RealSense,Intel出品,旗下有很多系列,协作机械臂、无人车上用的比较多
奥比中光,国内入局较早,多轮融资,后为魅族开发过TOF解决方案,不仅仅局限于结构光技术
Xtion PRO,芯片使用的是苹果收购的PrimeSense,行业老大
Zivid,支持ROS,挪威出品,据说20年研发
Pickit,支持ROS,试用多种机械臂ABB、UR、KUKA、Fanuc、Yaskawa等
Allied Vision,主要应用在工业
Photoneo,支持ROS,宣称使用坏境光抑制技术
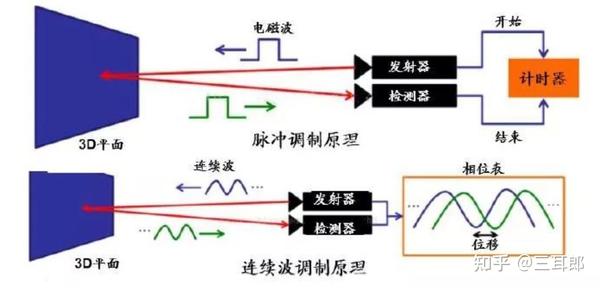
b、时间飞行法(TOF)深度相机
基本原理:TOF就是时间飞行法,就是给目标发射连续的光脉冲,经过目标反射,通过传感器接受回来的光,记录飞行的时间,计算出到目标的距离,一般分脉冲调制和连续波调制两种
因其主动发射脉冲光,也属于主动测量方式
优点:
TOF的测量距离较远,不受表面灰度和特征影响,达百米,可用于无人驾驶
深度距离计算,不会随距离的变化而变化,稳定在厘米级
不像双目相机、结构光需要经过算法处理才能输出三维数据,TOF可以直接输出被测物体三维数据
相比于结构技术的静态场景,TOF更适合动态场景
缺点:
精度较差,很难达毫米级,因其对时间测量设备要求高,这点比不上结构光的近距离(1m内)应用,限制在近距离高精度领域的应用
室外强光照基本不能使用
代表产品
Kinect2.0,同Kinect1.0一样,微软官方已停产
Basler,RGB、深度图像、点云图
Terabee,支持ROS,也提供时间飞行传感模块
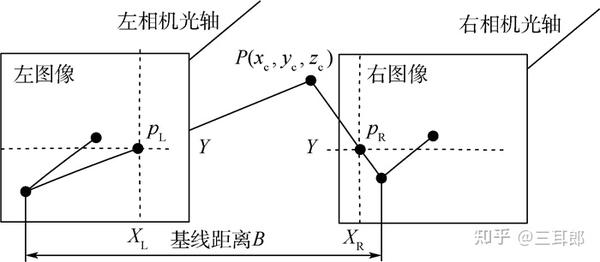
c、双目立体深度相机
基本原理:通过左右两个摄像头获取图像信息,计算视差
关于视差,类似人的双眼,你单独睁开左、右眼,与同时睁开双眼观看物体的位置、远近不同
双目相机不主动对外发射光源,因此称为被动深度相机,目前多应用在科研领域
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/209380.html原文链接:https://javaforall.net


