
【自控笔记】6.3 Z变换理论
本文框架如下:
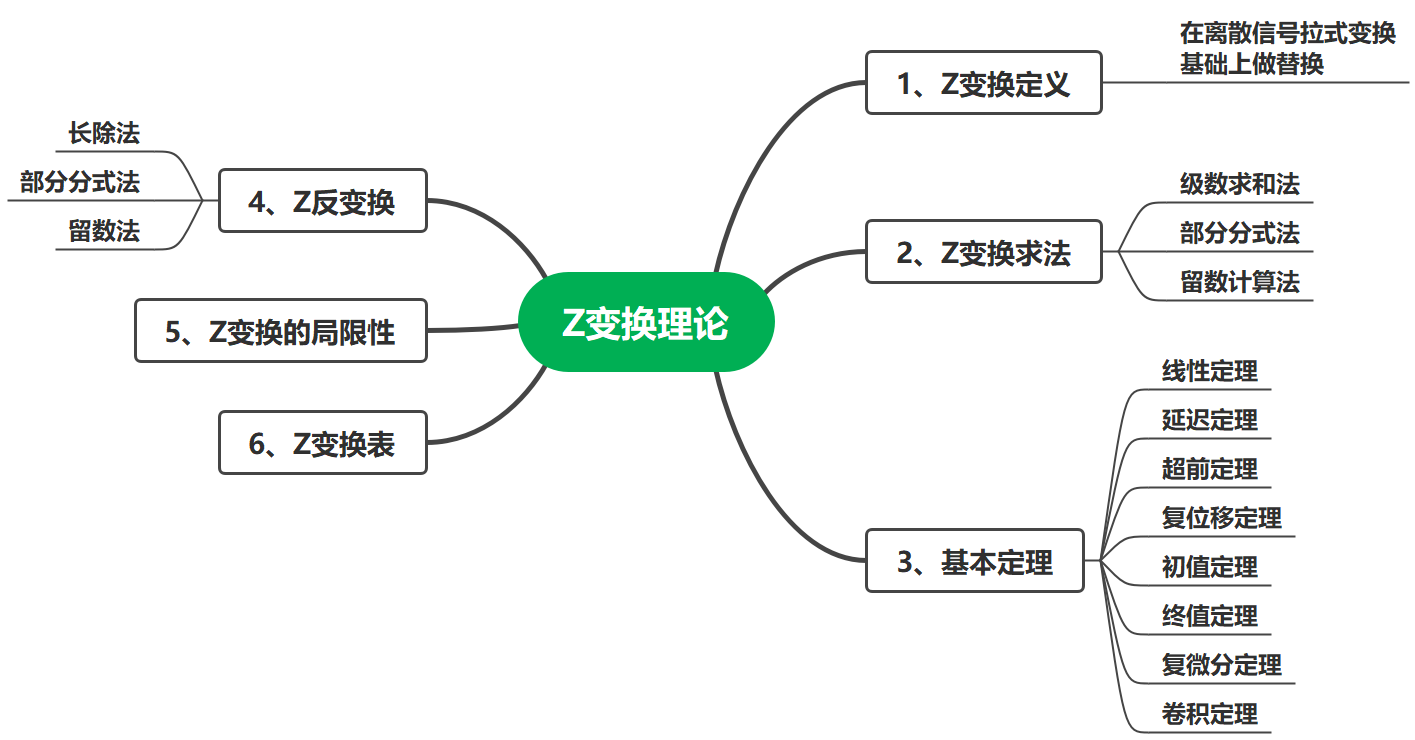

一、Z变换定义
Z变换是研究离散系统的数学工具,与拉式变换在连续系统中的地位是一样的。Z变换只对离散信号而言,Z变换对连续信号无意义。它并不是一种新的数学变换,它只是在离散信号拉普拉斯变换中的 e T s e^{Ts} eTs转换成 z z z。
连续信号 f ( t ) f(t) f(t)采样后信号的离散信号 f ∗ ( t ) f^*(t) f∗(t)为
f ∗ ( t ) = ∑ n = 0 ∞ f ( n T ) δ ( t − n T ) f^*(t)=\sum_{n=0}^{\infty}f(nT)δ(t-nT) f∗(t)=n=0∑∞f(nT)δ(t−nT)
注意:有时候也写作 Z [ f ( t ) ] = Z [ f ∗ ( t ) ] = F ( z ) Z[f(t)]=Z[f^*(t)]=F(z) Z[f(t)]=Z[f∗(t)]=F(z),只是因为采样时刻 f ( t ) f(t) f(t)的值就是 f ( n T ) f(nT) f(nT), 并不能认为 F ( z ) F(z) F(z)有对应的 f ( t ) f(t) f(t), F ( z ) F(z) F(z)只和 f ∗ ( t ) f^*(t) f∗(t)唯一对应。
二、Z变换求法
令 s = 1 T l n z s=\frac{1}{T}lnz s=T1lnz,只要知道 f ( t ) f(t) f(t)在各个时刻采样的数值,即可得到Z变换。
例2:求指数函数 f ( t ) = e − a t ( a > 0 ) f(t)=e^{-at}(a>0) f(t)=e−at(a>0)的Z变换。
解:由于在采样时刻 f ( n T ) = e − a n T f(nT)=e^{-anT} f(nT)=e−anT,根据定义式有
F ( z ) = 1 + e − a T z − 1 + e − 2 a T z − 2 + . . . + e − n a T z − n + . . . = z z − e − a T ∣ z ∣ > e − a T F(z)=1+e^{-aT}z^{-1}+e^{-2aT}z^{-2}+…+e^{-naT}z^{-n}+…=\frac{z}{z-e^{-aT}}\quad|z|>e^{-aT} F(z)=1+e−aTz−1+e−2aTz−2+...+e−naTz−n+...=z−e−aTz∣z∣>e−aT
注意,掌握级数求和法应该要建立在高等数学无穷级数这一章节的内容之上。抓住麦克劳林公式是构建函数与无穷级数之间的桥梁这一关键点,并能熟练掌握常见的麦克劳林公式。
2、部分分式法
部分分式法就是将离散信号的时域形式或拉氏变换形式展开成部分分式,然后再查表对照即可。
3、留数计算法
F ( z ) = Z [ f ∗ ( t ) ] = ∑ i = 0 k R e s [ F ( s ) z z − e s i T ] s → s i = ∑ i = 0 k R i F(z)=Z[f^*(t)]=\sum_{i=0}^{k}Res[F(s){\frac{z}{z-e^{s_iT}}}]_{s\to s_i}=\sum_{i=0}^{k}R_i F(z)=Z[f∗(t)]=i=0∑kRes[F(s)z−esiTz]s→si=i=0∑kRi
式中 R i = R e s [ F ( s ) z z − e s i T ] s → s i R_i=Res[F(s){\frac{z}{z-e^{s_iT}}}]_{s\to s_i} Ri=Res[F(s)z−esiTz]s→si是 F ( s ) z z − e s i T F(s){\frac{z}{z-e^{s_iT}}} F(s)z−esiTz在 s = s i s=s_i s=si处的留数。
当 F ( s ) F(s) F(s)具有一阶极点 s = s i s=s_i s=si时,其留数 R i R_i Ri为
R i = lim s → s i ( s − s i ) F ( s ) [ z z − e s i T ] R_i={\lim_{s \to s_i}}(s-s_i)F(s)[{\frac{z}{z-e^{s_iT}}}] Ri=s→silim(s−si)F(s)[z−esiTz]
当 F ( s ) F(s) F(s)具有q阶极点 s = s i s=s_i s=si时,其留数 R i R_i Ri为
R i = 1 ( q − 1 ) ! lim s → s i d q − 1 d s q − 1 [ ( s − s i ) q F ( s ) z z − e s i T ] R_i=\frac{1}{(q-1)!}{\lim_{s \to s_i}}\frac{d^{q-1}}{ds^{q-1}}[(s-s_i)^qF(s){\frac{z}{z-e^{s_iT}}}] Ri=(q−1)!1s→silimdsq−1dq−1[(s−si)qF(s)z−esiTz]
三、Z变换基本定理
F ( z ) = ∑ k = 0 ∞ f ( k T ) ⋅ z − k F(z)=\sum_{k=0}^{\infty}f(kT)·z^{-k} F(z)=k=0∑∞f(kT)⋅z−k
四、Z反变换
Z反变换记作 Z − 1 [ F ( z ) ] = f ∗ ( t ) Z^{-1}[F(z)]=f^*(t) Z−1[F(z)]=f∗(t),注意,Z反变换只能求出采样的离散函数 f ∗ ( t ) f^*(t) f∗(t)或 f ( n t ) f(nt) f(nt),而不能求出连续函数 f ( t ) f(t) f(t)。
2、部分分式法
部分分式法就是将 F ( z ) F(z) F(z)展开成部分分式得到 f ∗ ( t ) f^*(t) f∗(t)或 f ( n T ) f(nT) f(nT),然后再查表对照即可。
3、留数法
f ( n T ) = 1 2 π j ∫ c F ( z ) z n − 1 d z = ∑ i = 1 n R e s [ F ( z ) z n − 1 ] f(nT)=\frac{1}{2πj}\int_cF(z)z^{n-1}dz=\sum_{i=1}^{n}Res[F(z)z^{n-1}] f(nT)=2πj1∫cF(z)zn−1dz=i=1∑nRes[F(z)zn−1]
当 F ( z ) F(z) F(z)具有一阶极点 z = z i z=z_i z=zi时,其留数 R i R_i Ri为
R i = lim z → z i [ ( z − z i ) F ( z ) z n − 1 ] R_i={\lim_{z \to z_i}}[(z-z_i)F(z)z^{n-1}] Ri=z→zilim[(z−zi)F(z)zn−1]
当 F z s ) Fzs) Fzs)具有q阶极点 z = z i z=z_i z=zi时,其留数 R i R_i Ri为
R i = 1 ( q − 1 ) ! lim z → z i d q − 1 d s q − 1 [ ( z − z i ) q F ( z ) z n − 1 ] R_i=\frac{1}{(q-1)!}{\lim_{z \to z_i}}\frac{d^{q-1}}{ds^{q-1}}[(z-z_i)^qF(z)z^{n-1}] Ri=(q−1)!1z→zilimdsq−1dq−1[(z−zi)qF(z)zn−1]
五、Z变换的局限
1、Z变换只能反映函数时间函数在采样时刻的瞬时值,而不能反映采样点间的信息。
如果在采样开关和 G ( s ) G(s) G(s)之间有零阶保持器,则一定条件下的 G ( s ) G(s) G(s)在t=0时刻,不为0,会发生跳变,这样采样输出 c ∗ ( t ) c^*(t) c∗(t)与 c ( t ) c(t) c(t)之间会有较大的差别。
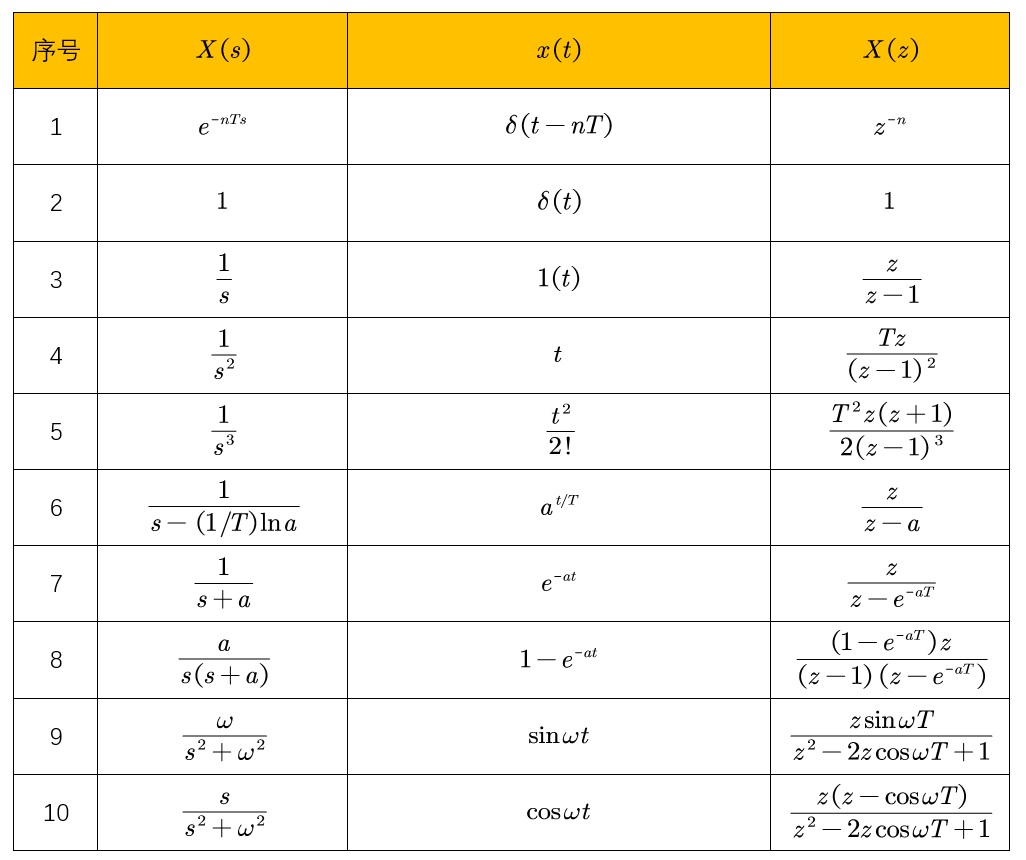
六、变换表(附)
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/212263.html原文链接:https://javaforall.net


