
步骤
- 用高斯滤波器平滑图像;
- 用一阶偏导有限差分计算梯度幅值和方向;
- 对梯度幅值应用非极大值抑制;
- 用双阈值算法检测和连接边缘。
一、openCV在C++中的应用
首先,在mac的Xcode上安装配置openCV库,参考一下链接(科学上网访问)https://medium.com/@jaskaranvirdi/setting-up-opencv-and-c-development-environment-in-xcode-b
using namespace cv; // 使用命名空间cv如此可以减少输入,例如 cv :: Mat 就可省略为 Mat
Mat
Mat的优点是不再需要手动分配其内存,并在不需要它时立即发布它。在执行此操作仍然是可能的情况下,大多数OpenCV功能将自动分配其输出数据。
Mat作为一个类,包含
- 矩阵头(包含矩阵的大小,用于存储的方法,存储在哪个地址的信息等等)
- 指向包含像素值(取决于所选存储方法的任何维度)
从文件中加载图像:
Mat img = imread(filename);如果需要加载灰度图:
Mat img = imread(filename, IMREAD_GRAYSCALE);显示图像:
namedWindow("图片"); //打开名为“图片”的窗口 imshow("图片", img); //显示图像openCV加载图像显示
using namespace cv; // 使用命名空间cv int main() { Mat img = imread("building.jpg", IMREAD_GRAYSCALE); //从文件中加载灰度图像 //显示图像 namedWindow("原图"); imshow("原图", img); waitKey(); //等待键值输入 return 0; }如何访问图像每一个像素点
利用指针访问,调用 Mat::ptr(i) 来获取第i行的首地址,通过循环进行访问。
// 按行遍历所有点(单通道) for (int j = 0; j < nr; j++) { for (int i = 0; i < nc; i++) { //每个点为 img.ptr
(j)[i] } }
二、用高斯滤波器平滑图像
高斯滤波器(openCV)
openCV自带的高斯滤波器:cv :: GaussianBlur
| void cv::GaussianBlur | ( | InputArray | src, |
| OutputArray | dst, | ||
| Size | ksize, | ||
| double | sigmaX, | ||
| double | sigmaY = 0, |
||
| int | borderType = BORDER_DEFAULT |
||
| ) |
#include
使用高斯滤镜模糊图像。
该函数将源图像与指定的高斯内核进行卷积。支持就地过滤。
参量
| src | 输入图像;图像可以具有任意数量的通道,这些通道可以独立处理,但深度应为CV_8U,CV_16U,CV_16S,CV_32F或CV_64F。 |
| dst | 输出与src大小和类型相同的图像。 |
| size | 高斯核大小。ksize.width和ksize.height可以不同,但它们都必须为正数和奇数。或者,它们可以为零,然后根据sigma计算得出。 |
| sigmaX | X方向上的高斯核标准偏差。 |
| sigmaY | Y方向的高斯核标准差;如果sigmaY为零,则将其设置为等于sigmaX;如果两个sigmas为零,则分别从ksize.width和ksize.height计算得出(有关详细信息,请参见getGaussianKernel);为了完全控制结果,而不管将来可能对所有这些语义进行的修改,建议指定所有ksize,sigmaX和sigmaY。 |
| borderType | 像素外推方法,请参见BorderTypes |
高斯滤波器的C++实现
- 对图像使用一维高斯卷积模版,在一个方向上进行滤波(例如水平方向);
- 转置图像;
- 对转置后的图像使用同一个高斯卷积模版,在同样的方向上进行滤波;
- 将图像转置回原来的位置,得到二维高斯滤波的图像。
一维高斯卷积模版可以由二项式展开的系数来模拟,如3*3模版: 1/4 * [1 2 1]
/ 高斯滤波器,利用3*3的高斯模版进行高斯卷积 img 输入原图像 dst 高斯滤波后的输出图像 */ void gaussianFilter(Mat &img, Mat &dst) { // 对水平方向进行滤波 Mat dst1 = img.clone(); gaussianConvolution(img, dst1); //图像矩阵转置 Mat dst2; transpose(dst1, dst2); // 对垂直方向进行滤波 Mat dst3 = dst2.clone(); gaussianConvolution(dst2, dst3); // 再次转置 transpose(dst3, dst); }/ 一维高斯卷积,对每行进行高斯卷积 img 输入原图像 dst 一维高斯卷积后的输出图像 */ void gaussianConvolution(Mat &img, Mat &dst) { int nr = img.rows; int nc = img.cols; int templates[3] = {1, 2, 1}; // 按行遍历除每行边缘点的所有点 for (int j = 0; j < nr; j++) { uchar* data= img.ptr
(j); //提取该行地址 for (int i = 1; i < nc-1; i++) { int sum = 0; for (int n = 0; n < 3; n++) { sum += data[i-1+n] * templates[n]; //相称累加 } sum /= 4; dst.ptr
(j)[i] = sum; } } }
高斯滤波前后的图像:


三、用一阶偏导有限差分计算梯度幅值和方向
用一阶偏导有限差分计算偏导数的两个阵列P与Q
再由P和Q算出梯度幅值和方向角
/ 用一阶偏导有限差分计算梯度幅值和方向 img 输入原图像 gradXY 输出的梯度幅值 theta 输出的梯度方向 */ void getGrandient (Mat &img, Mat &gradXY, Mat &theta) { gradXY = Mat::zeros(img.size(), CV_8U); theta = Mat::zeros(img.size(), CV_8U); for (int i = 0; i < img.rows-1; i++) { for (int j = 0; j < img.cols-1; j++) { double p = (img.ptr
(j)[i+1] - img.ptr
(j)[i] + img.ptr
(j+1)[i+1] - img.ptr
(j+1)[i])/2; double q = (img.ptr
(j+1)[i] - img.ptr
(j)[i] + img.ptr
(j+1)[i+1] - img.ptr
(j)[i+1])/2; gradXY.ptr
(j)[i] = sqrt(p*p + q*q); //计算梯度 theta.ptr
(j)[i] = atan(q/p); } } }
此时输入输出图像为:

可以看出,二维计算梯度只区分出了部分边界,边界损失过大,于是采用三维算法计算梯度((y,x)为a11)。
| a00 | a01 | a02 |
| a10 | a11 | a12 |
| a20 | a21 | a22 |
double gradX = double(a02 + 2 * a12 + a22 - a00 - 2 * a10 - a20); double gradY = double(a00 + 2 * a01 + a02 - a20 - 2 * a21 - a22);/ 用一阶偏导有限差分计算梯度幅值和方向 img 输入原图像 gradXY 输出的梯度幅值 theta 输出的梯度方向 */ void getGrandient (Mat &img, Mat &gradXY, Mat &theta) { gradXY = Mat::zeros(img.size(), CV_8U); theta = Mat::zeros(img.size(), CV_8U); for (int j = 1; j < img.rows-1; j++) { for (int i = 1; i < img.cols-1; i++) { double gradY = double(img.ptr
(j-1)[i-1] + 2 * img.ptr
(j-1)[i] + img.ptr
(j-1)[i+1] - img.ptr
(j+1)[i-1] - 2 * img.ptr
(j+1)[i] - img.ptr
(j+1)[i+1]); double gradX = double(img.ptr
(j-1)[i+1] + 2 * img.ptr
(j)[i+1] + img.ptr
(j+1)[i+1] - img.ptr
(j-1)[i-1] - 2 * img.ptr
(j)[i-1] - img.ptr
(j+1)[i-1]); gradXY.ptr
(j)[i] = sqrt(gradX*gradX + gradY*gradY); //计算梯度 theta.ptr
(j)[i] = atan(gradY/gradX); //计算梯度方向 } } }
三维梯度算法的输入输出图像:

四、对梯度幅值应用非极大值抑制
仅仅得到全局梯度并不足以确定边缘,保留局部梯度最大的点,而抑制非极大点。
- 将梯度角的变化范围减小到圆周的四个扇区之一;
- 四个扇区的标号为0到3,对应3*3领域的四种可能组合方向;
- 每一个点上领域的中心像素M与沿着梯度线的两个像素比较;
- 如果M梯度值不比沿梯度线的两个相邻像素梯度值大,则令M=0。
由 atan() 得到的角度在 范围内,将此范围均分为四个等份。

/ 局部非极大值抑制 gradXY 输入的梯度幅值 theta 输入的梯度方向 dst 输出的经局部非极大值抑制后的图像 */ void nonLocalMaxValue (Mat &gradXY, Mat &theta, Mat &dst) { dst = gradXY.clone(); for (int j = 1; j < gradXY.rows-1; j++) { for (int i = 1; i < gradXY.cols-1; i++) { double t = double(theta.ptr
(j)[i]); double g = double(dst.ptr
(j)[i]); if (g == 0.0) { continue; } double g0, g1; if ((t >= -(3*M_PI/8)) && (t < -(M_PI/8))) { g0 = double(dst.ptr
(j-1)[i-1]); g1 = double(dst.ptr
(j+1)[i+1]); } else if ((t >= -(M_PI/8)) && (t < M_PI/8)) { g0 = double(dst.ptr
(j)[i-1]); g1 = double(dst.ptr
(j)[i+1]); } else if ((t >= M_PI/8) && (t < 3*M_PI/8)) { g0 = double(dst.ptr
(j-1)[i+1]); g1 = double(dst.ptr
(j+1)[i-1]); } else { g0 = double(dst.ptr
(j-1)[i]); g1 = double(dst.ptr
(j+1)[i]); } if (g <= g0 || g <= g1) { dst.ptr
(j)[i] = 0.0; } } } }
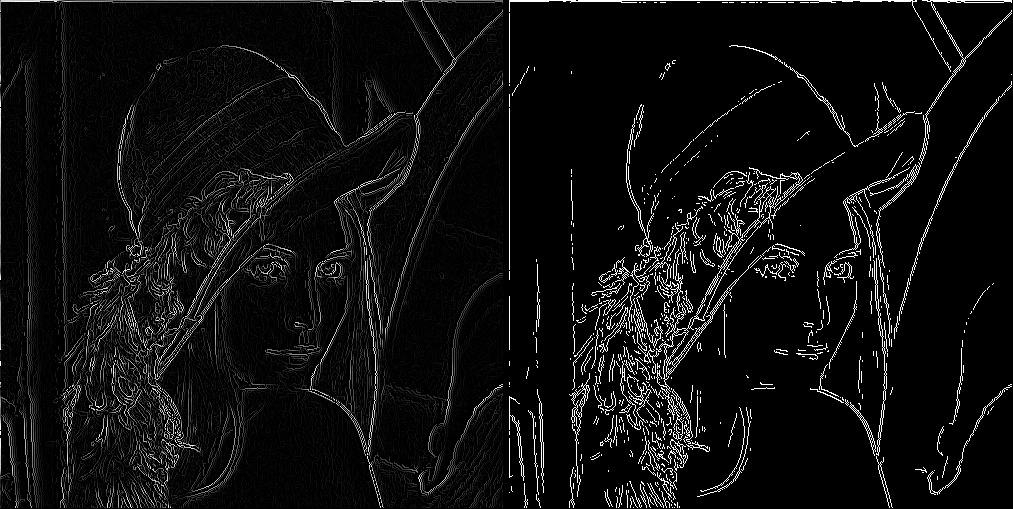
输入的经梯度计算后的图像和输出的局部非极大值抑制后的图像:

五、用双阈值算法检测和连接边缘
1、Canny算法采用双阈值,高阈值一般是低阈值的两倍,遍历所有像素点:
X < 低阈值 ,像素点置0,被抑制掉;
低阈值 < X <高阈值,像素点为弱边缘点,像素点值先不变;< p="">
X > 高阈值,像素点为强边缘点,置255。
2、弱边缘点补充连接强边缘点:
如果弱边缘点的8邻点域存在强边缘点,则将此点置255,用以连接强边缘点;如果不存在强边缘点,则这是一个孤立的弱边缘点,此点置0。
/ 用双阈值算法检测和连接边缘 low 输入的低阈值 high 输入的高阈值 img 输入的原图像 dst 输出的用双阈值算法检测和连接边缘后的图像 */ void doubleThreshold (double low, double high, Mat &img, Mat &dst) { dst = img.clone(); // 区分出弱边缘点和强边缘点 for (int j = 0; j < img.rows-1; j++) { for (int i = 0; i < img.cols-1; i++) { double x = double(dst.ptr
(j)[i]); // 像素点为强边缘点,置255 if (x > high) { dst.ptr
(j)[i] = 255; } // 像素点置0,被抑制掉 else if (x < low) { dst.ptr
(j)[i] = 0; } } } // 弱边缘点补充连接强边缘点 doubleThresholdLink(dst); }
/ 弱边缘点补充连接强边缘点 img 弱边缘点补充连接强边缘点的输入和输出图像 */ void doubleThresholdLink (Mat &img) { // 循环找到强边缘点,把其领域内的弱边缘点变为强边缘点 for (int j = 1; j < img.rows-2; j++) { for (int i = 1; i < img.cols-2; i++) { // 如果该点是强边缘点 if (img.ptr
(j)[i] == 255) { // 遍历该强边缘点领域 for (int m = -1; m < 1; m++) { for (int n = -1; n < 1; n++) { // 该点为弱边缘点(不是强边缘点,也不是被抑制的0点) if (img.ptr
(j+m)[i+n] != 0 && img.ptr
(j+m)[i+n] != 255) { img.ptr
(j+m)[i+n] = 255; //该弱边缘点补充为强边缘点 } } } } } } for (int j = 0; j < img.rows-1; j++) { for (int i = 0; i < img.cols-1; i++) { // 如果该点依旧是弱边缘点,及此点是孤立边缘点 if (img.ptr
(j)[i] != 255 && img.ptr
(j)[i] != 255) { img.ptr
(j)[i] = 0; //该孤立弱边缘点抑制 } } } }
双阈值算法前后的输入输出图像 :
Canny边缘检测代码
#include
#include
#define _USE_MATH_DEFINES using namespace cv;// 使用命名空间cv / 将两个图像拼接,以便在同一个窗口显示 dst 输出的拼接后的图像 src1 拼接的第一幅图 src2 拼接的第二幅图 */ void mergeImg(Mat & dst,Mat &src1,Mat &src2) { int rows = src1.rows; int cols = src1.cols+5+src2.cols; CV_Assert(src1.type () == src2.type ()); dst.create (rows,cols,src1.type ()); src1.copyTo (dst(Rect(0,0,src1.cols,src1.rows))); src2.copyTo (dst(Rect(src1.cols+5,0,src2.cols,src2.rows))); } / 一维高斯卷积,对每行进行高斯卷积 img 输入原图像 dst 一维高斯卷积后的输出图像 */ void gaussianConvolution(Mat &img, Mat &dst) { int nr = img.rows; int nc = img.cols; int templates[3] = {1, 2, 1}; // 按行遍历除每行边缘点的所有点 for (int j = 0; j < nr; j++) { uchar* data= img.ptr
(j); //提取该行地址 for (int i = 1; i < nc-1; i++) { int sum = 0; for (int n = 0; n < 3; n++) { sum += data[i-1+n] * templates[n]; //相称累加 } sum /= 4; dst.ptr
(j)[i] = sum; } } } / 高斯滤波器,利用3*3的高斯模版进行高斯卷积 img 输入原图像 dst 高斯滤波后的输出图像 */ void gaussianFilter(Mat &img, Mat &dst) { // 对水平方向进行滤波 Mat dst1 = img.clone(); gaussianConvolution(img, dst1); //图像矩阵转置 Mat dst2; transpose(dst1, dst2); // 对垂直方向进行滤波 Mat dst3 = dst2.clone(); gaussianConvolution(dst2, dst3); // 再次转置 transpose(dst3, dst); } / 用一阶偏导有限差分计算梯度幅值和方向 img 输入原图像 gradXY 输出的梯度幅值 theta 输出的梯度方向 */ void getGrandient (Mat &img, Mat &gradXY, Mat &theta) { gradXY = Mat::zeros(img.size(), CV_8U); theta = Mat::zeros(img.size(), CV_8U); for (int j = 1; j < img.rows-1; j++) { for (int i = 1; i < img.cols-1; i++) { double gradY = double(img.ptr
(j-1)[i-1] + 2 * img.ptr
(j-1)[i] + img.ptr
(j-1)[i+1] - img.ptr
(j+1)[i-1] - 2 * img.ptr
(j+1)[i] - img.ptr
(j+1)[i+1]); double gradX = double(img.ptr
(j-1)[i+1] + 2 * img.ptr
(j)[i+1] + img.ptr
(j+1)[i+1] - img.ptr
(j-1)[i-1] - 2 * img.ptr
(j)[i-1] - img.ptr
(j+1)[i-1]); gradXY.ptr
(j)[i] = sqrt(gradX*gradX + gradY*gradY); //计算梯度 theta.ptr
(j)[i] = atan(gradY/gradX); //计算梯度方向 } } } / 局部非极大值抑制 gradXY 输入的梯度幅值 theta 输入的梯度方向 dst 输出的经局部非极大值抑制后的图像 */ void nonLocalMaxValue (Mat &gradXY, Mat &theta, Mat &dst) { dst = gradXY.clone(); for (int j = 1; j < gradXY.rows-1; j++) { for (int i = 1; i < gradXY.cols-1; i++) { double t = double(theta.ptr
(j)[i]); double g = double(dst.ptr
(j)[i]); if (g == 0.0) { continue; } double g0, g1; if ((t >= -(3*M_PI/8)) && (t < -(M_PI/8))) { g0 = double(dst.ptr
(j-1)[i-1]); g1 = double(dst.ptr
(j+1)[i+1]); } else if ((t >= -(M_PI/8)) && (t < M_PI/8)) { g0 = double(dst.ptr
(j)[i-1]); g1 = double(dst.ptr
(j)[i+1]); } else if ((t >= M_PI/8) && (t < 3*M_PI/8)) { g0 = double(dst.ptr
(j-1)[i+1]); g1 = double(dst.ptr
(j+1)[i-1]); } else { g0 = double(dst.ptr
(j-1)[i]); g1 = double(dst.ptr
(j+1)[i]); } if (g <= g0 || g <= g1) { dst.ptr
(j)[i] = 0.0; } } } } / 弱边缘点补充连接强边缘点 img 弱边缘点补充连接强边缘点的输入和输出图像 */ void doubleThresholdLink (Mat &img) { // 循环找到强边缘点,把其领域内的弱边缘点变为强边缘点 for (int j = 1; j < img.rows-2; j++) { for (int i = 1; i < img.cols-2; i++) { // 如果该点是强边缘点 if (img.ptr
(j)[i] == 255) { // 遍历该强边缘点领域 for (int m = -1; m < 1; m++) { for (int n = -1; n < 1; n++) { // 该点为弱边缘点(不是强边缘点,也不是被抑制的0点) if (img.ptr
(j+m)[i+n] != 0 && img.ptr
(j+m)[i+n] != 255) { img.ptr
(j+m)[i+n] = 255; //该弱边缘点补充为强边缘点 } } } } } } for (int j = 0; j < img.rows-1; j++) { for (int i = 0; i < img.cols-1; i++) { // 如果该点依旧是弱边缘点,及此点是孤立边缘点 if (img.ptr
(j)[i] != 255 && img.ptr
(j)[i] != 255) { img.ptr
(j)[i] = 0; //该孤立弱边缘点抑制 } } } } / 用双阈值算法检测和连接边缘 low 输入的低阈值 high 输入的高阈值 img 输入的原图像 dst 输出的用双阈值算法检测和连接边缘后的图像 */ void doubleThreshold (double low, double high, Mat &img, Mat &dst) { dst = img.clone(); // 区分出弱边缘点和强边缘点 for (int j = 0; j < img.rows-1; j++) { for (int i = 0; i < img.cols-1; i++) { double x = double(dst.ptr
(j)[i]); // 像素点为强边缘点,置255 if (x > high) { dst.ptr
(j)[i] = 255; } // 像素点置0,被抑制掉 else if (x < low) { dst.ptr
(j)[i] = 0; } } } // 弱边缘点补充连接强边缘点 doubleThresholdLink(dst); } int main () { Mat img = imread("woman.jpg", IMREAD_GRAYSCALE); //从文件中加载灰度图像 // 读取图片失败,则停止 if (img.empty()) { printf("读取图像文件失败"); system("pause"); return 0; } // 高斯滤波 Mat gauss_img; gaussianFilter(img, gauss_img); //高斯滤波器 // 用一阶偏导有限差分计算梯度幅值和方向 Mat gradXY, theta; getGrandient(gauss_img, gradXY, theta); // 局部非极大值抑制 Mat local_img; nonLocalMaxValue(gradXY, theta, local_img); // 用双阈值算法检测和连接边缘 Mat dst; doubleThreshold(40, 80, local_img, dst); // 图像显示 Mat outImg; mergeImg (outImg,img,dst); //图像拼接 namedWindow("img"); imshow("img",outImg);// 图像显示 imwrite("canny算法.jpg", outImg); waitKey(); //等待键值输入 return 0; }
Canny边缘检测的前后图像

参考资源:
【1】Setting up OpenCV and C++ development environment in Xcode for Computer Vision projects,地址:https://medium.com/@jaskaranvirdi/setting-up-opencv-and-c-development-environment-in-xcode-b
【2】OpenCV Tutorials,地址:https://docs.opencv.org/master/d9/df8/tutorial_root.html
【3】OpenCV教程,地址:https://www.w3cschool.cn/opencv/opencv-2gnx28u3.html
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/230117.html原文链接:https://javaforall.net


