
文本检测和一般目标检测的不同——文本线是一个sequence(字符、字符的一部分、多字符组成的一个sequence),而不是一般目标检测中只有一个独立的目标。这既是优势,也是难点。优势体现在同一文本线上不同字符可以互相利用上下文,可以用sequence的方法比如RNN来表示。难点体现在要检测出一个完整的文本线,同一文本线上不同字符可能差异大,距离远,要作为一个整体检测出来难度比单个目标更大——因此,作者认为预测文本的竖直位置(文本bounding box的上下边界)比水平位置(文本bounding box的左右边界)更容易。
环境:
- pytorch最新版
- ubunt18.05
- opencv
- pillow
- numpy
前言
前期数据的准备,需要大家自己去爬取或者下载
GitHub上面很多,国外的网站有很多开源的;
提示:以下是本篇文章正文内容,下面案例可供参考
一、数据集准备
在这里我使用了600张图片来训练模型,由于数据集不是很好,模型的泛化能力较差(鲁棒性差),大家可以使用更多的数据来训练模型。

样本数据集
 在这里大家爱还可以使用自己准备的数据集,来训练模型。
在这里大家爱还可以使用自己准备的数据集,来训练模型。
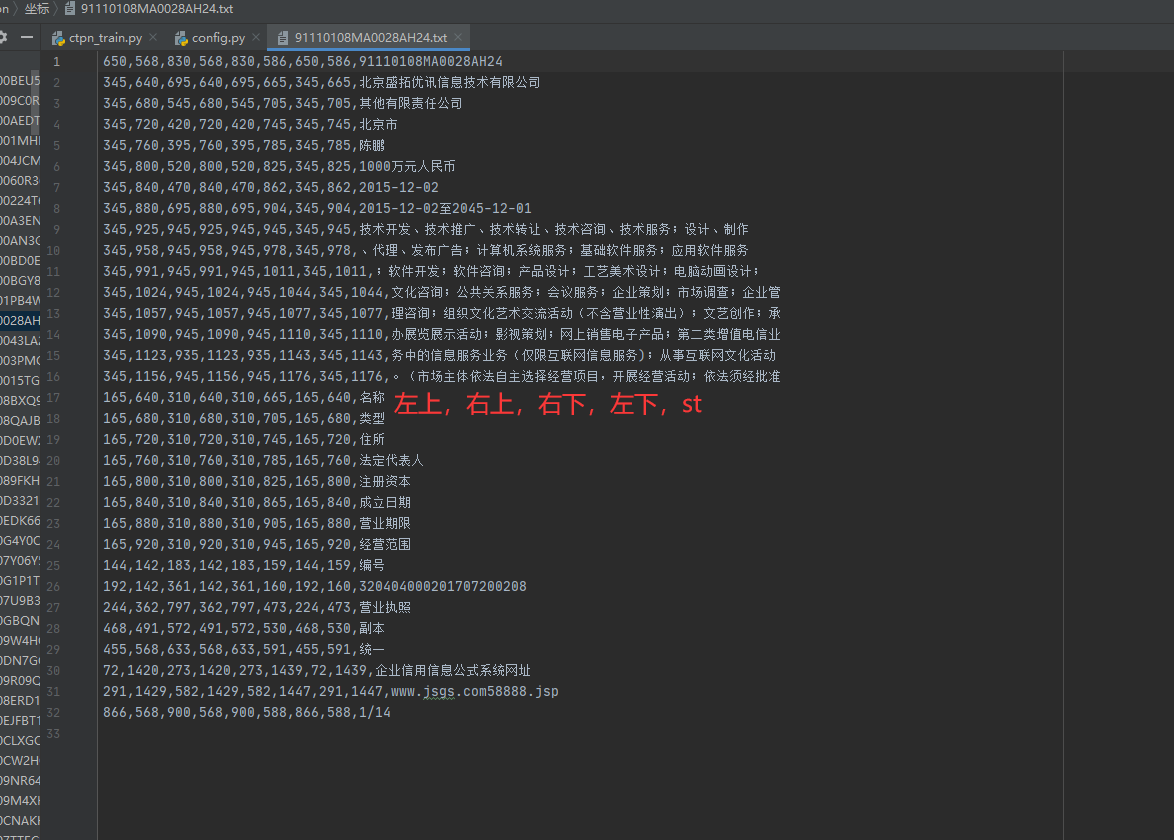
二、数据标签准备
在这里的标签就更简单了,大家可以使用labelimg标签工具来打标签,得到的XML文件可以提取其中的坐标信息;
在这里就需要注意的是,我们的每张图片的标签文件(xxxx.txt)必须是一张图一个标签文件,名字必须是一一对应
左上,右上,右下,左下,str
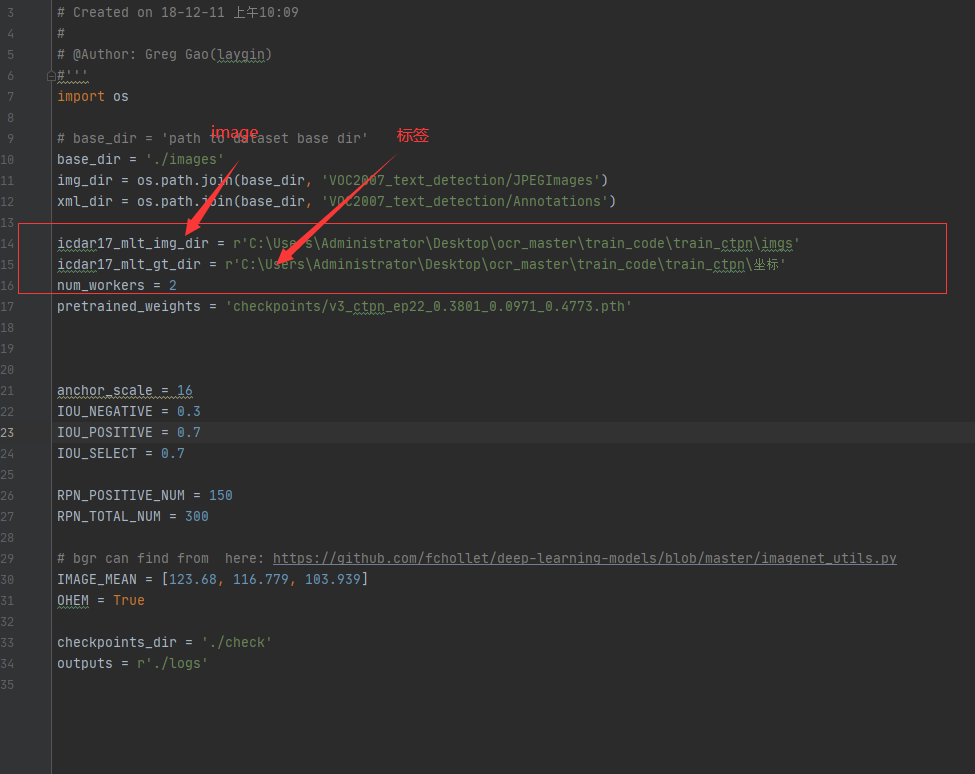
三、模型训练
源代码链接:

大家吧config.py文件里面的数据 集路径配置好就行
数据集链接:
针对这个数据集(1.6G),为天池开源数据集,如果大家有感兴趣的,可以下载下来训练模型; 如果要是大家觉得时间有限的话,可以不去训练模型,可以直接加载大家下载那个CTPN.path那个模型,玩玩就可以。注意注意:此为开源项目

四、文字检测(CTPN)完整代码
代码:
链接:https://pan.baidu.com/s/1VGQM3vh3zletMy3Vi94DrA
提取码:8888
数据集+模型:
链接:https://pan.baidu.com/s/1dOscxy1fkobW_g3VOM2qcQ
提取码: win6
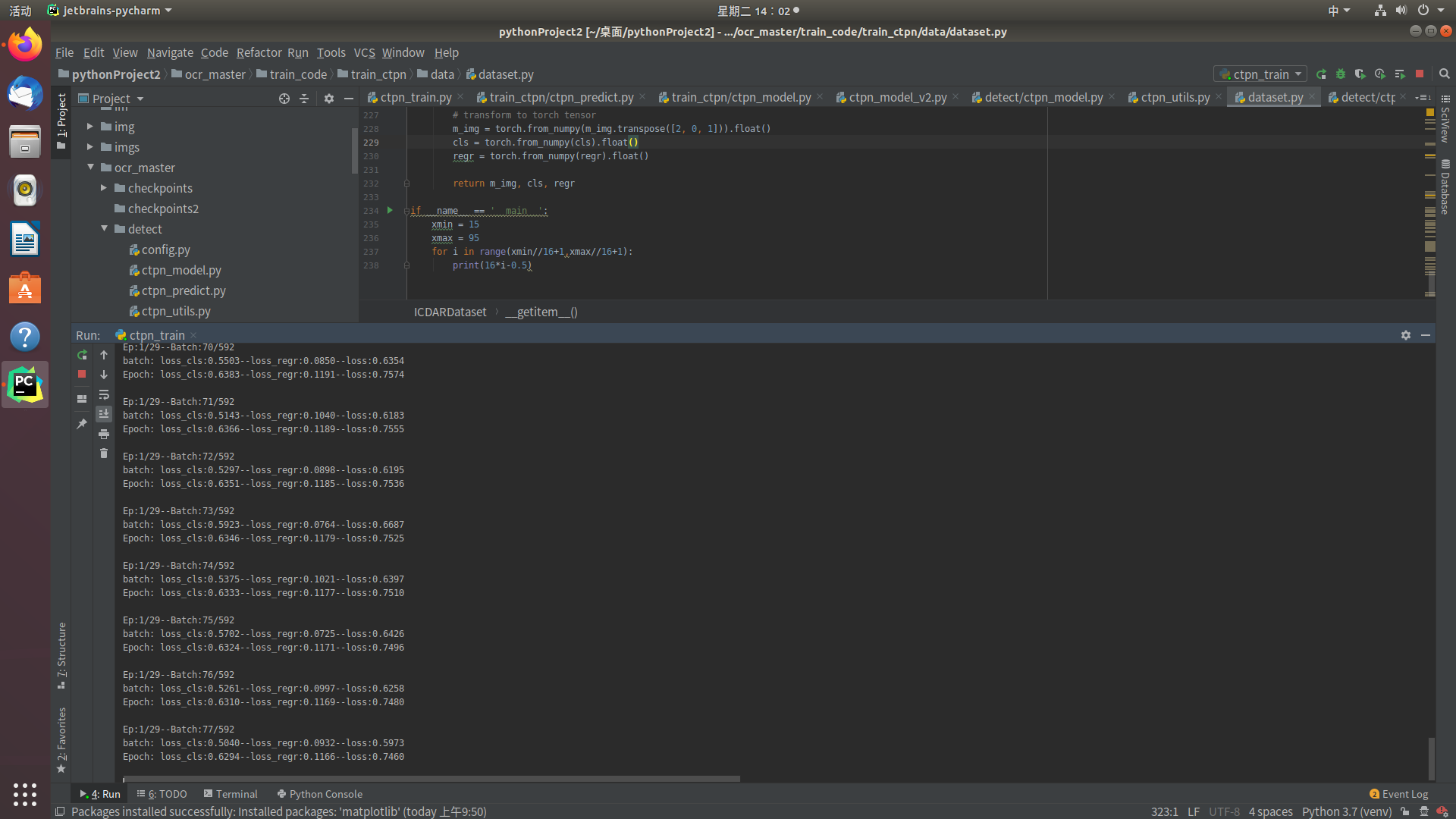
五、训练结果展示
六、加载CTPN文字检测模型,验证
import os os.environ['CUDA_VISIBLE_DEVICES'] = '0' import cv2 import numpy as np import torch import torch.nn as nn import torch.nn.functional as F import torchvision.models as models import numpy as np from PIL import Image from PIL import Image """ GPU加载 """ prob_thresh = 0.5 gpu = True if not torch.cuda.is_available(): gpu = False device = torch.device('cuda:0' if gpu else 'cpu') print("能够使用GPU"+str(gpu)) """ 模型加载 """ class basic_conv(nn.Module): def __init__(self, in_planes, out_planes, kernel_size, stride=1, padding=0, dilation=1, groups=1, relu=True, bn=True, bias=True): super(basic_conv, self).__init__() self.out_channels = out_planes self.conv = nn.Conv2d(in_planes, out_planes, kernel_size=kernel_size, stride=stride, padding=padding, dilation=dilation, groups=groups, bias=bias) self.bn = nn.BatchNorm2d(out_planes, eps=1e-5, momentum=0.01, affine=True) if bn else None self.relu = nn.ReLU(inplace=True) if relu else None def forward(self, x): x = self.conv(x) if self.bn is not None: x = self.bn(x) if self.relu is not None: x = self.relu(x) return x class CTPN_Model(nn.Module): def __init__(self): super().__init__() base_model = models.vgg16(pretrained=False) layers = list(base_model.features)[:-1] self.base_layers = nn.Sequential(*layers) # block5_conv3 output self.rpn = basic_conv(512, 512, 3, 1, 1, bn=False) self.brnn = nn.GRU(512, 128, bidirectional=True, batch_first=True) self.lstm_fc = basic_conv(256, 512, 1, 1, relu=True, bn=False) self.rpn_class = basic_conv(512, 10 * 2, 1, 1, relu=False, bn=False) self.rpn_regress = basic_conv(512, 10 * 2, 1, 1, relu=False, bn=False) def forward(self, x): x = self.base_layers(x) # rpn x = self.rpn(x) # [b, c, h, w] x1 = x.permute(0, 2, 3, 1).contiguous() # channels last [b, h, w, c] b = x1.size() # b, h, w, c x1 = x1.view(b[0] * b[1], b[2], b[3]) x2, _ = self.brnn(x1) xsz = x.size() x3 = x2.view(xsz[0], xsz[2], xsz[3], 256) # torch.Size([4, 20, 20, 256]) x3 = x3.permute(0, 3, 1, 2).contiguous() # channels first [b, c, h, w] x3 = self.lstm_fc(x3) x = x3 cls = self.rpn_class(x) regr = self.rpn_regress(x) cls = cls.permute(0, 2, 3, 1).contiguous() regr = regr.permute(0, 2, 3, 1).contiguous() cls = cls.view(cls.size(0), cls.size(1) * cls.size(2) * 10, 2) regr = regr.view(regr.size(0), regr.size(1) * regr.size(2) * 10, 2) return cls, regr weights = '/home/zc/桌面/pythonProject2/ocr_master/checkpoints/CTPN.pth' # CTPN模型路径 model = CTPN_Model() model.load_state_dict(torch.load(weights, map_location=device)['model_state_dict']) model.to(device) model.eval() """ 配置信息 """ IMAGE_MEAN = [123.68, 116.779, 103.939] def gen_anchor(featuresize, scale): """ gen base anchor from feature map [HXW][9][4] reshape [HXW][9][4] to [HXWX9][4] """ heights = [11, 16, 23, 33, 48, 68, 97, 139, 198, 283] widths = [16, 16, 16, 16, 16, 16, 16, 16, 16, 16] # gen k=9 anchor size (h,w) heights = np.array(heights).reshape(len(heights), 1) widths = np.array(widths).reshape(len(widths), 1) base_anchor = np.array([0, 0, 15, 15]) # center x,y xt = (base_anchor[0] + base_anchor[2]) * 0.5 yt = (base_anchor[1] + base_anchor[3]) * 0.5 # x1 y1 x2 y2 x1 = xt - widths * 0.5 y1 = yt - heights * 0.5 x2 = xt + widths * 0.5 y2 = yt + heights * 0.5 base_anchor = np.hstack((x1, y1, x2, y2)) h, w = featuresize shift_x = np.arange(0, w) * scale shift_y = np.arange(0, h) * scale # apply shift anchor = [] for i in shift_y: for j in shift_x: anchor.append(base_anchor + [j, i, j, i]) return np.array(anchor).reshape((-1, 4)) def bbox_transfor_inv(anchor, regr): """ return predict bbox """ Cya = (anchor[:, 1] + anchor[:, 3]) * 0.5 ha = anchor[:, 3] - anchor[:, 1] + 1 Vcx = regr[0, :, 0] Vhx = regr[0, :, 1] Cyx = Vcx * ha + Cya hx = np.exp(Vhx) * ha xt = (anchor[:, 0] + anchor[:, 2]) * 0.5 x1 = xt - 16 * 0.5 y1 = Cyx - hx * 0.5 x2 = xt + 16 * 0.5 y2 = Cyx + hx * 0.5 bbox = np.vstack((x1, y1, x2, y2)).transpose() return bbox def clip_box(bbox, im_shape): # x1 >= 0 bbox[:, 0] = np.maximum(np.minimum(bbox[:, 0], im_shape[1] - 1), 0) # y1 >= 0 bbox[:, 1] = np.maximum(np.minimum(bbox[:, 1], im_shape[0] - 1), 0) # x2 < im_shape[1] bbox[:, 2] = np.maximum(np.minimum(bbox[:, 2], im_shape[1] - 1), 0) # y2 < im_shape[0] bbox[:, 3] = np.maximum(np.minimum(bbox[:, 3], im_shape[0] - 1), 0) return bbox def filter_bbox(bbox, minsize): ws = bbox[:, 2] - bbox[:, 0] + 1 hs = bbox[:, 3] - bbox[:, 1] + 1 keep = np.where((ws >= minsize) & (hs >= minsize))[0] return keep def nms(dets, thresh): x1 = dets[:, 0] y1 = dets[:, 1] x2 = dets[:, 2] y2 = dets[:, 3] scores = dets[:, 4] areas = (x2 - x1 + 1) * (y2 - y1 + 1) order = scores.argsort()[::-1] keep = [] while order.size > 0: i = order[0] keep.append(i) xx1 = np.maximum(x1[i], x1[order[1:]]) yy1 = np.maximum(y1[i], y1[order[1:]]) xx2 = np.minimum(x2[i], x2[order[1:]]) yy2 = np.minimum(y2[i], y2[order[1:]]) w = np.maximum(0.0, xx2 - xx1 + 1) h = np.maximum(0.0, yy2 - yy1 + 1) inter = w * h ovr = inter / (areas[i] + areas[order[1:]] - inter) inds = np.where(ovr <= thresh)[0] order = order[inds + 1] return keep class Graph: def __init__(self, graph): self.graph = graph def sub_graphs_connected(self): sub_graphs = [] for index in range(self.graph.shape[0]): if not self.graph[:, index].any() and self.graph[index, :].any(): v = index sub_graphs.append([v]) while self.graph[v, :].any(): v = np.where(self.graph[v, :])[0][0] sub_graphs[-1].append(v) return sub_graphs class TextLineCfg: SCALE = 600 MAX_SCALE = 1200 TEXT_PROPOSALS_WIDTH = 16 MIN_NUM_PROPOSALS = 2 MIN_RATIO = 0.5 LINE_MIN_SCORE = 0.9 MAX_HORIZONTAL_GAP = 60 TEXT_PROPOSALS_MIN_SCORE = 0.7 TEXT_PROPOSALS_NMS_THRESH = 0.3 MIN_V_OVERLAPS = 0.6 MIN_SIZE_SIM = 0.6 class Graph: def __init__(self, graph): self.graph = graph def sub_graphs_connected(self): sub_graphs = [] for index in range(self.graph.shape[0]): if not self.graph[:, index].any() and self.graph[index, :].any(): v = index sub_graphs.append([v]) while self.graph[v, :].any(): v = np.where(self.graph[v, :])[0][0] sub_graphs[-1].append(v) return sub_graphs class TextProposalGraphBuilder: """ Build Text proposals into a graph. """ def get_successions(self, index): box = self.text_proposals[index] results = [] for left in range(int(box[0]) + 1, min(int(box[0]) + TextLineCfg.MAX_HORIZONTAL_GAP + 1, self.im_size[1])): adj_box_indices = self.boxes_table[left] for adj_box_index in adj_box_indices: if self.meet_v_iou(adj_box_index, index): results.append(adj_box_index) if len(results) != 0: return results return results def get_precursors(self, index): box = self.text_proposals[index] results = [] for left in range(int(box[0]) - 1, max(int(box[0] - TextLineCfg.MAX_HORIZONTAL_GAP), 0) - 1, -1): adj_box_indices = self.boxes_table[left] for adj_box_index in adj_box_indices: if self.meet_v_iou(adj_box_index, index): results.append(adj_box_index) if len(results) != 0: return results return results def is_succession_node(self, index, succession_index): precursors = self.get_precursors(succession_index) if self.scores[index] >= np.max(self.scores[precursors]): return True return False def meet_v_iou(self, index1, index2): def overlaps_v(index1, index2): h1 = self.heights[index1] h2 = self.heights[index2] y0 = max(self.text_proposals[index2][1], self.text_proposals[index1][1]) y1 = min(self.text_proposals[index2][3], self.text_proposals[index1][3]) return max(0, y1 - y0 + 1) / min(h1, h2) def size_similarity(index1, index2): h1 = self.heights[index1] h2 = self.heights[index2] return min(h1, h2) / max(h1, h2) return overlaps_v(index1, index2) >= TextLineCfg.MIN_V_OVERLAPS and \ size_similarity(index1, index2) >= TextLineCfg.MIN_SIZE_SIM def build_graph(self, text_proposals, scores, im_size): self.text_proposals = text_proposals self.scores = scores self.im_size = im_size self.heights = text_proposals[:, 3] - text_proposals[:, 1] + 1 boxes_table = [[] for _ in range(self.im_size[1])] for index, box in enumerate(text_proposals): boxes_table[int(box[0])].append(index) self.boxes_table = boxes_table graph = np.zeros((text_proposals.shape[0], text_proposals.shape[0]), np.bool) for index, box in enumerate(text_proposals): successions = self.get_successions(index) if len(successions) == 0: continue succession_index = successions[np.argmax(scores[successions])] if self.is_succession_node(index, succession_index): # NOTE: a box can have multiple successions(precursors) if multiple successions(precursors) # have equal scores. graph[index, succession_index] = True return Graph(graph) class TextProposalConnectorOriented: """ Connect text proposals into text lines """ def __init__(self): self.graph_builder = TextProposalGraphBuilder() def group_text_proposals(self, text_proposals, scores, im_size): graph = self.graph_builder.build_graph(text_proposals, scores, im_size) return graph.sub_graphs_connected() def fit_y(self, X, Y, x1, x2): # len(X) != 0 # if X only include one point, the function will get line y=Y[0] if np.sum(X == X[0]) == len(X): return Y[0], Y[0] p = np.poly1d(np.polyfit(X, Y, 1)) return p(x1), p(x2) def get_text_lines(self, text_proposals, scores, im_size): """ text_proposals:boxes """ # tp=text proposal tp_groups = self.group_text_proposals(text_proposals, scores, im_size) # 首先还是建图,获取到文本行由哪几个小框构成 text_lines = np.zeros((len(tp_groups), 8), np.float32) for index, tp_indices in enumerate(tp_groups): text_line_boxes = text_proposals[list(tp_indices)] # 每个文本行的全部小框 X = (text_line_boxes[:, 0] + text_line_boxes[:, 2]) / 2 # 求每一个小框的中心x,y坐标 Y = (text_line_boxes[:, 1] + text_line_boxes[:, 3]) / 2 z1 = np.polyfit(X, Y, 1) # 多项式拟合,根据之前求的中心店拟合一条直线(最小二乘) x0 = np.min(text_line_boxes[:, 0]) # 文本行x坐标最小值 x1 = np.max(text_line_boxes[:, 2]) # 文本行x坐标最大值 offset = (text_line_boxes[0, 2] - text_line_boxes[0, 0]) * 0.5 # 小框宽度的一半 # 以全部小框的左上角这个点去拟合一条直线,然后计算一下文本行x坐标的极左极右对应的y坐标 lt_y, rt_y = self.fit_y(text_line_boxes[:, 0], text_line_boxes[:, 1], x0 + offset, x1 - offset) # 以全部小框的左下角这个点去拟合一条直线,然后计算一下文本行x坐标的极左极右对应的y坐标 lb_y, rb_y = self.fit_y(text_line_boxes[:, 0], text_line_boxes[:, 3], x0 + offset, x1 - offset) score = scores[list(tp_indices)].sum() / float(len(tp_indices)) # 求全部小框得分的均值作为文本行的均值 text_lines[index, 0] = x0 text_lines[index, 1] = min(lt_y, rt_y) # 文本行上端 线段 的y坐标的小值 text_lines[index, 2] = x1 text_lines[index, 3] = max(lb_y, rb_y) # 文本行下端 线段 的y坐标的大值 text_lines[index, 4] = score # 文本行得分 text_lines[index, 5] = z1[0] # 根据中心点拟合的直线的k,b text_lines[index, 6] = z1[1] height = np.mean((text_line_boxes[:, 3] - text_line_boxes[:, 1])) # 小框平均高度 text_lines[index, 7] = height + 2.5 text_recs = np.zeros((len(text_lines), 9), np.float) index = 0 for line in text_lines: b1 = line[6] - line[7] / 2 # 根据高度和文本行中心线,求取文本行上下两条线的b值 b2 = line[6] + line[7] / 2 x1 = line[0] y1 = line[5] * line[0] + b1 # 左上 x2 = line[2] y2 = line[5] * line[2] + b1 # 右上 x3 = line[0] y3 = line[5] * line[0] + b2 # 左下 x4 = line[2] y4 = line[5] * line[2] + b2 # 右下 disX = x2 - x1 disY = y2 - y1 width = np.sqrt(disX * disX + disY * disY) # 文本行宽度 fTmp0 = y3 - y1 # 文本行高度 fTmp1 = fTmp0 * disY / width x = np.fabs(fTmp1 * disX / width) # 做补偿 y = np.fabs(fTmp1 * disY / width) if line[5] < 0: x1 -= x y1 += y x4 += x y4 -= y else: x2 += x y2 += y x3 -= x y3 -= y text_recs[index, 0] = x1 text_recs[index, 1] = y1 text_recs[index, 2] = x2 text_recs[index, 3] = y2 text_recs[index, 4] = x3 text_recs[index, 5] = y3 text_recs[index, 6] = x4 text_recs[index, 7] = y4 text_recs[index, 8] = line[4] index = index + 1 return text_recs """ 调用 """ def get_det_boxes(image,display = True, expand = True): # image = resize(image, height=height) image_r = image.copy() image_c = image.copy() h, w = image.shape[:2] image = image.astype(np.float32) - IMAGE_MEAN image = torch.from_numpy(image.transpose(2, 0, 1)).unsqueeze(0).float() with torch.no_grad(): image = image.to(device) cls, regr = model(image) cls_prob = F.softmax(cls, dim=-1).cpu().numpy() regr = regr.cpu().numpy() anchor = gen_anchor((int(h / 16), int(w / 16)), 16) bbox = bbox_transfor_inv(anchor, regr) bbox = clip_box(bbox, [h, w]) # print(bbox.shape) fg = np.where(cls_prob[0, :, 1] > prob_thresh)[0] # print(np.max(cls_prob[0, :, 1])) select_anchor = bbox[fg, :] select_score = cls_prob[0, fg, 1] select_anchor = select_anchor.astype(np.int32) # print(select_anchor.shape) keep_index = filter_bbox(select_anchor, 16) # nms select_anchor = select_anchor[keep_index] select_score = select_score[keep_index] select_score = np.reshape(select_score, (select_score.shape[0], 1)) nmsbox = np.hstack((select_anchor, select_score)) keep = nms(nmsbox, 0.3) # print(keep) select_anchor = select_anchor[keep] select_score = select_score[keep] # text line- textConn = TextProposalConnectorOriented() text = textConn.get_text_lines(select_anchor, select_score, [h, w]) # expand text if expand: for idx in range(len(text)): text[idx][0] = max(text[idx][0] - 10, 0) text[idx][2] = min(text[idx][2] + 10, w - 1) text[idx][4] = max(text[idx][4] - 10, 0) text[idx][6] = min(text[idx][6] + 10, w - 1) if display: blank = np.zeros(image_c.shape,dtype=np.uint8) for box in select_anchor: pt1 = (box[0], box[1]) pt2 = (box[2], box[3]) print(pt1, pt2) cv2.rectangle(image_c,pt1, pt2, (0, 0, 0)) return [pt1, pt2],image_c #返回检测框,画框图片 def single_pic_proc(image_file): image = np.array(Image.open(image_file).convert('RGB')) _, img = get_det_boxes(image) return img if __name__ == '__main__': """ 上传图片路径 返回图片和坐标 """ url = '/home/zc/桌面/pythonProject2/imgs/MA00BEU57K.jpg' img = single_pic_proc(url) Image.fromarray(img).save('./op.jpg') 
发布者:全栈程序员-站长,转载请注明出处:https://javaforall.net/230141.html原文链接:https://javaforall.net


